







 本文深入探讨了ROS中Service和Action的通信机制,对比了publish/subscribe与Service的异同,详细解析了.srv和.action文件的格式及用途,同时介绍了Action如何提供状态反馈,适用于长时间任务。
本文深入探讨了ROS中Service和Action的通信机制,对比了publish/subscribe与Service的异同,详细解析了.srv和.action文件的格式及用途,同时介绍了Action如何提供状态反馈,适用于长时间任务。
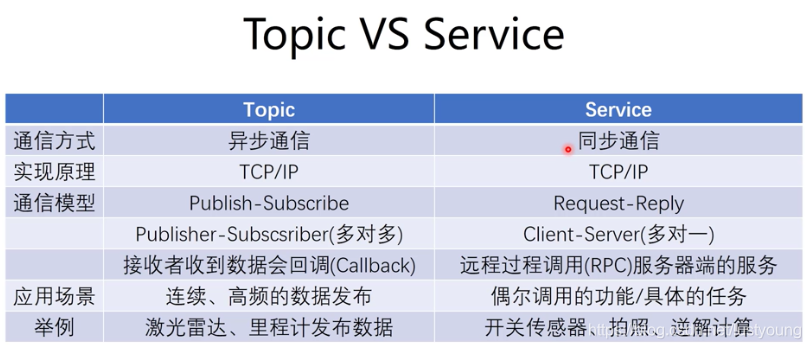
publish和subcribe是单向传输,但这种传输方式有时候并不能满足我们的要求
所以我们就有了service,同步通信方式,node间通过request-reply方式通信
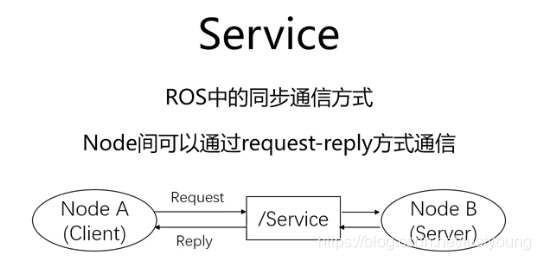
过程描述:node A需要某个数据,发出了一个request调用service,然后在原地等候(阻塞),直到服务器端返回结果,然后nodeA继续执行。
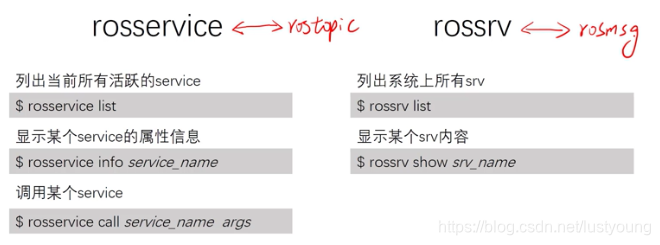
和之前的topic的对比:
service通信的数据格式定义在*.srv文件中,可以类比topic中的*.msg(srv文件放在/Pkg/srv文件夹中)
srv文件格式:
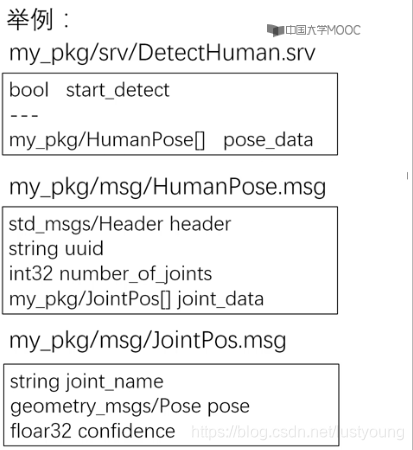
在srv文件中有三个短横,上面是请求数据需要遵守的格式,下面是数据传回的格式
这个humanpose是一个msg自定义的格式(看第二个格子),也就是说srv可以嵌套msg,但是srv不能嵌套srv
而这个自定义的humanpose.msg中又嵌套了另外一个自定义的msg JointPos。也就是说msg中可以嵌套msg
在自定义完msg或者srv后一定要去修改CMakeList.txt和package.xml,添加编译和运行时依赖
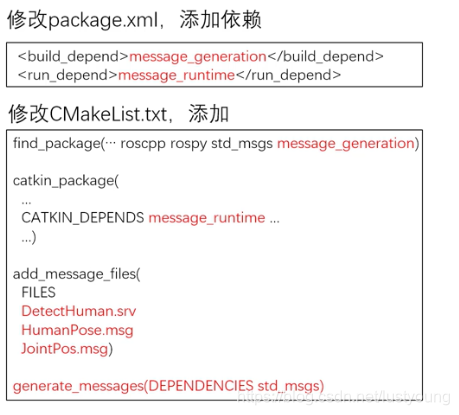 (具体写法还是要百度一下)
(具体写法还是要百度一下)
常用指令:
Parameter Server:参数服务器(静态)
维护着一个字典,里面包含着参数和配置。方便一些数据的读写,可以用命令行,launch文件,API中进行读写
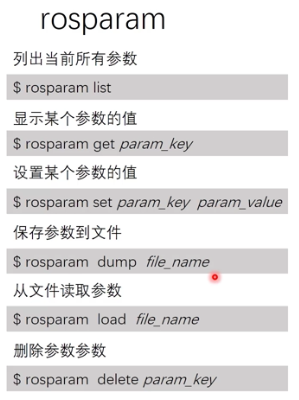
常用指令:
在launch文件中的配置方法:
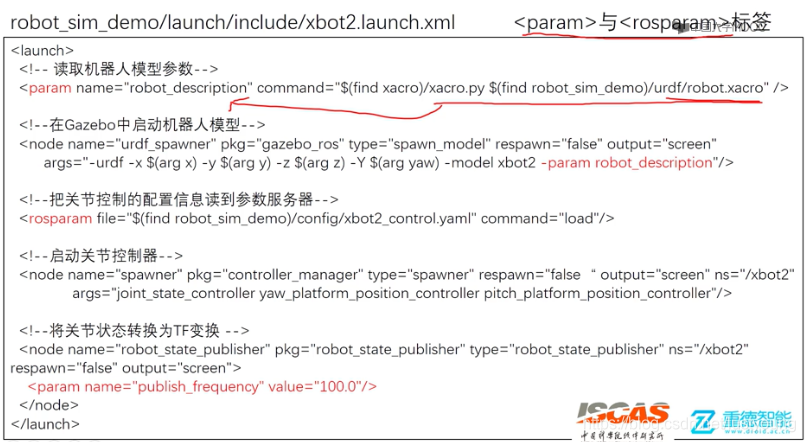
(yaml文件可以视为一个字典文件)
之前提到过service通讯模型在请求后提出请求的节点会阻塞,但是有时候请求响应的时间比较长(大量计算,小车动作),这个时候service的client可能要等很久才可以知道结果。所以我们希望有一个实时的反馈。
Action:(升级版service)带有状态反馈的通信方式,通常用在长时间、可抢占的任务
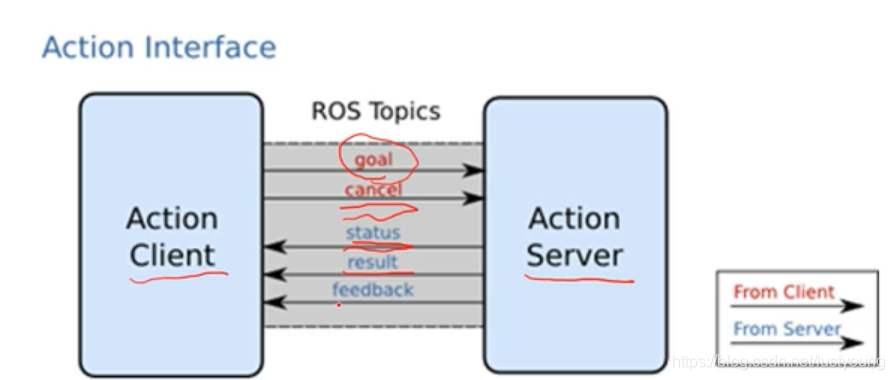
可以中途取消,可以在运行中途知道运行了多少进度(或者其他状态信息)
action通讯的数据格式定义在*.action文件中,相当于.srv对应service,.msg对应于topic
action文件的书写:
一个 action文件分为三段,用“---”隔开

当然result可以空定义,只用多次回传的feedback信息
https://www.icourse163.org/learn/ISCAS-1002580008#/learn/content?type=detail&id=1004034129&sm=1
网课地址↑


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









