









实习期间看到很多人都在环境配置方面遇到问题,都比较费时间,于是记录一些碰到的问题的解决方法,主要包括ros的初始化问题,无线网卡驱动问题,以及拼音输入失效等问题,后期想起来再做补充吧。
ubuntu18.04
关于ubuntu的安装方式网上帖子太多了,我这里就不再赘述了,首先准备一个空U盘,去网上找教程做个启动盘,然后插入u盘重启,根据电脑型号按U盘启动键(一般是F10,F12这样子),进入安装,详细步骤好多博客都有写,主要是分盘这块,有些人遇到问题较多,根据我的个人安装经验,如果你电脑有俩块或者以上的硬盘,直接不用分盘,默认安装就好,它会自己在另一个硬盘中安装好系统,这样就一个硬盘Windows,另一个硬盘ubuntu,互不影响,如果就一个硬盘,最好安装前分盘,因为每个系统都是有启动引导项的,都在一个盘不分区会出现引导项混乱情况,可能找不到系统。另外,尽量不要用20.04版本,不是越新的版本越好哈。因为你用新系统,当你出现一些问题,参考经验少,同样的解决办法你可能不适用,遇到问题很费时间的!!!
其他方面没什么坑了。
近期,安装时出现了新问题,针对window11系统安装时,问题较多。首先需要关闭bois安全选项,还需要关闭硬件密码锁,不然会要密钥,很麻烦。安装完ubuntu后重新启动会卡死,以下链接解决了该问题;
解决卡死办法
安装后找不到wifi问题
有很多人安装好ubuntu后,出现了找不到wifi或者直接没有wifi这个图标的问题,大部分原因是找不到无线网卡驱动,网上找原因大概是Liunx内核低,识别不了驱动。
那我们直接安装无线驱动即可。但是电脑没网,先找网线用,没有网线先用手机usb网络传输。
首先查看电脑网卡类型:
lspci

下载release deb包:
https://github.com/juanro49/rtl88x2ce-dkms/releases
安装:sudo dpkg -i rtl88x2ce*.deb
我的电脑是C822ce类型网卡,直接搜这个信号网卡驱动安装教程即可。(下面是无线网卡类型,上面是有线网卡类型)
把secure boot关掉,最好升级一下gcc版本。
新的电脑硬件升级了,这个对应的网卡非常难找到,弄了好久,一个小伙伴找到了解决办法:
安装固件解决问题
ROS安装
激光slam一般都会用到ros,见到大家都在这块比较费事,提供一种好的方式。一般网上都有各种帖子记录怎么安装,我也不多赘述,提几个踩过的坑。
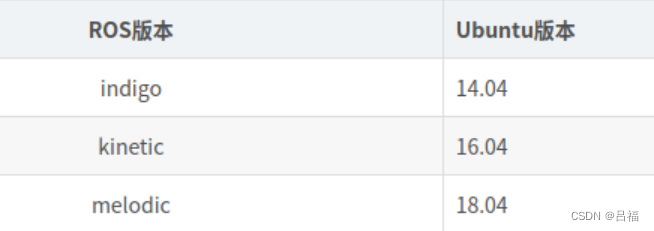
- 首先,要对应你系统版本安装不同ros版本,因此搜安装ros教程要附上ubuntu版本,对应好,比如ubuntu18.04对应melodic版本。
- 要换镜像源,一般以阿里云和清华源还有中科大的使用较多,去软件和更新里面找:

- 接下来就是搜教程一步步安装了,大部分遇到的问题就是ros初始化失败了,(我以18.04安装melodic版本介绍一些):
1. 添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2. 添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
essential
3. 为防止下面安装是出现错误,自己重新安装一下依赖。
sudo apt install libvtk6-jni libvtk6-java libvtk6-dev libvtk6-qt-dev libpcl-dev
sudo apt install ros-melodic-pcl-conversions ros-melodic-pcl-ros ros-melodic-perception-pcl ros-melodic-perception
4. 安装ROS
sudo apt update
sudo apt install ros-melodic-desktop-full
如果ubuntu16.04则输入以下命令代替最后那条:
sudo apt install ros-Kinetic-desktop-full
至此,安装差不多了,要进行初始化了,以下是初始化命令,一般都出问题在这里,所以先不要执行以下几步,看完我说的再进行哈!
初始化rosdep
sudo rosdep init
rosdep update
大部分人都会遇到初始化失败或者超时的问题(当然,你运气好一遍过,我安装好多次的确有一次一边过,笔记本容易点,台式电脑一般都会初始化失败),一般问题描述如下:

或者其他问题,超时啦等等,反正这步出问题,初始化的这一步将会从外国的网站raw.githubusercontent.com拉取一些信息和文件。这个网站现在被墙了,导致这一步出错。网上一般有不同的解决办法,例如使用 tizi,这个一般好使,但是一般大家没有(这个,嗯。。。)。还有换手机热点来回试,这个也有效,但是比较耗时,还有直接下好包,弄到本地,还有域名修改啥的,不同电脑,不同人成功率都不一样,直接上大招,先执行以下几步,再进行初始化,中途有报错先不用管。目前没遇到失败的。
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
然后;
sudo rosdep init
rosdep update
然后添加环境:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
再用案例验证,小乌龟处理就成功了(用不同终端打开,依次在不同新的终端输入命令,第三条是控制海龟运动的):
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
至此,大功告成!
输入法问题
好多人安装ubuntu后,都会安装一下中文输入法,很多都安装搜狗拼音输入法,但是安装好以后无法使用,我也遇到了。安装好之后切换不了中文输入法,不知道怎么回事,但之前成功配置过,后来也遇到其他人出现这个问题,网上也没找到原因,按照网上的办法尝试了一些,没解决。
推荐使用谷歌输入法,直接安装这个吧,也挺好用,不过它的切换快捷键是ctrl+空格














 6046
6046











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









