







一、 内容概要
Ⅰ 采用stm32F103和HC-SR04超声波模块, 使用标准库或HAL库+ 定时器中断,完成1或2路的超声波障碍物测距功能。
Ⅱ 当前智能汽车上一般配置有12路超声波雷达,这些专用超声波雷达内置了MCU,直接输出数字化的测距结果,一般硬件接口采用串口RS485,通信协议采用modbus。
① 了解 RS485与RS232(UART),Modbus协议
② 如果让你设计一款 12路车载超声波雷达,采用 stm32F103+HC-SR04超声波模块,对外提供RS485和Modbus协议,你的设计方案是什么?
二、 stm32超声波测距实现
2.1 准备工作
- CubeMx32
- keil
- stm32c8t6
- HC-SR04超声波模块
2.2 器件介绍
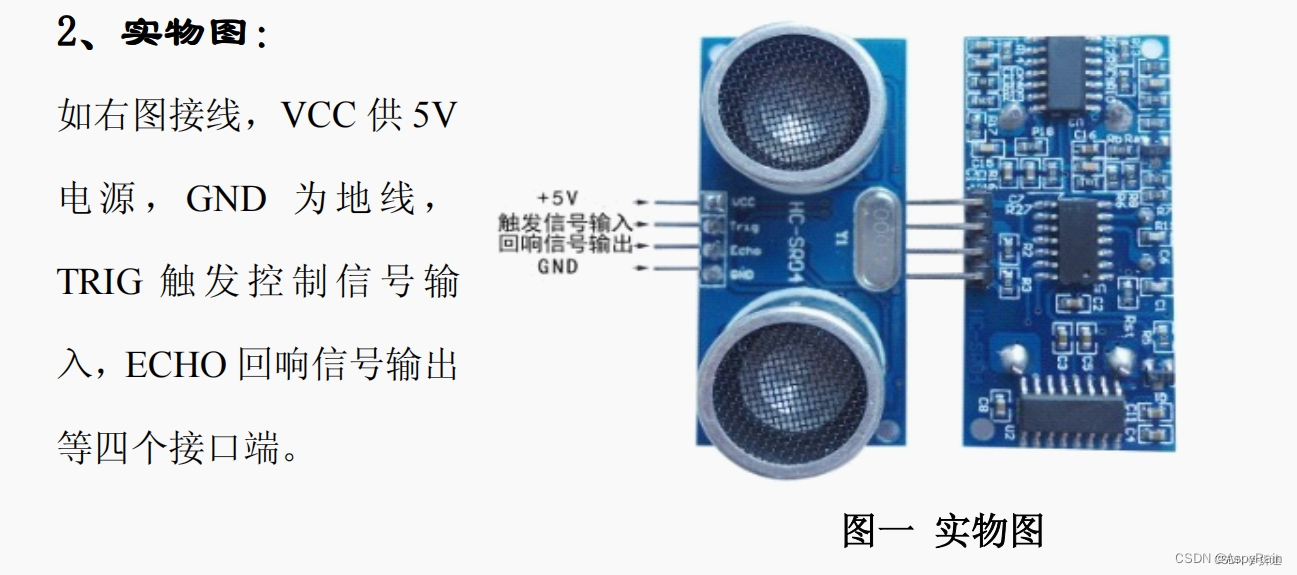
HC-SR04:
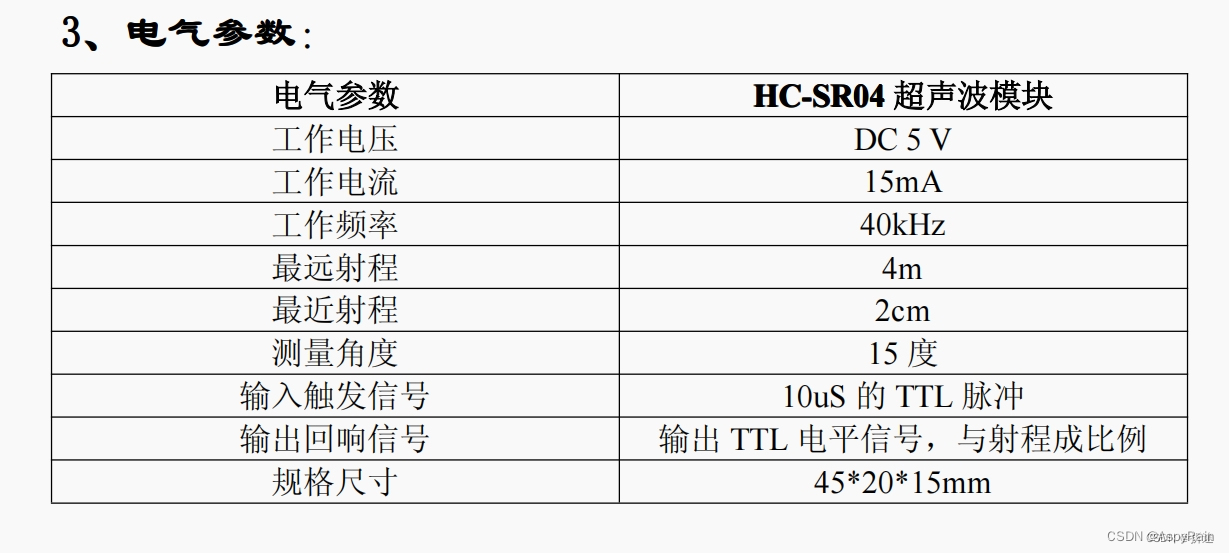
HC-SR04超声波测距模块提供2cm~400cm的测距功能,精度达3mm。
以下图片截取自深圳市捷深科技有限公司的《HC-SR04超声波测距模块说明书》
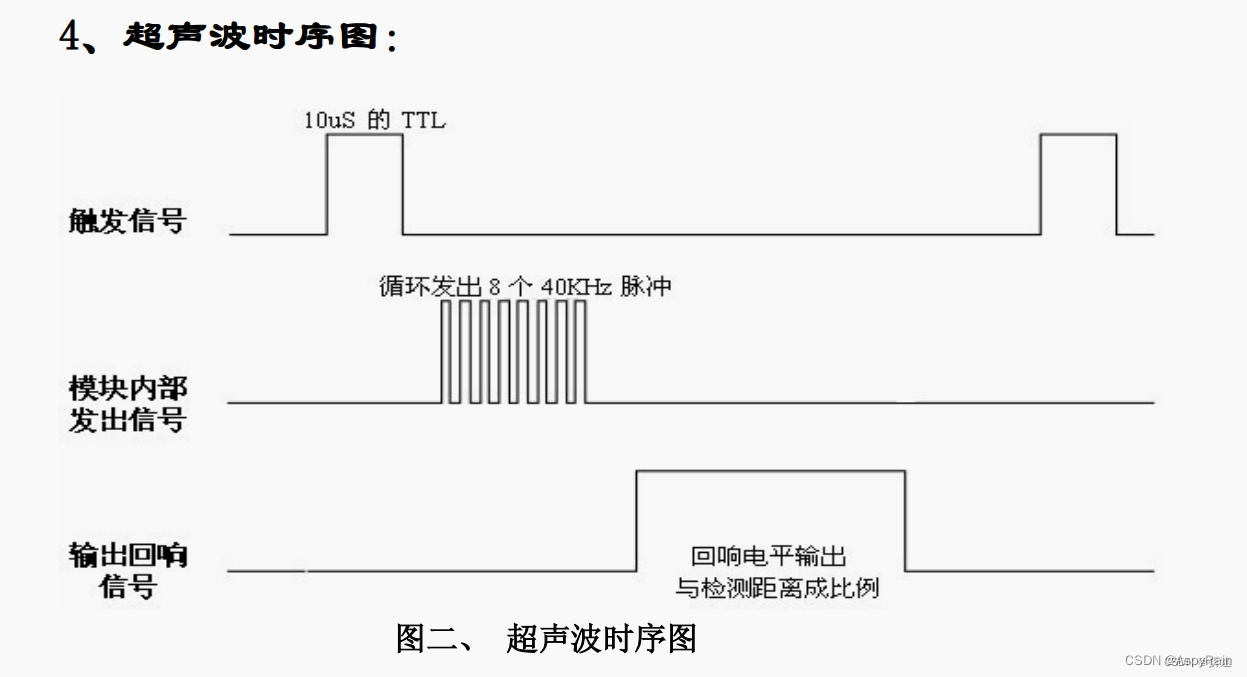
通过时序图我们可以知道,我们给HC-SR04发送长达10us的TTL脉冲,然后模块就会进行测距,测距的结果通过回响信号传达,回响的TTL电平信号时间即是超声波从HC-SR04模块发出,触碰到障碍物后返回到HC-SR04模块的时间总和。
TTL是逻辑电平标准,当电压达到2.4V5V之间,那么为逻辑1(高电平),电压在0V0.4V之间,那么为逻辑0(低电平)。所以我们可以直接通过GPIO口来输出以及输入时序所需的电平信号。
总所周知,声音的速度为340m/s,因此我们将回响电平的时间除340再除2之后得到的就是单位为米的测距结果。
编写思路:
结合说明书我们可以知道,我们仅需提供10us的高电平给Trig口即可。然后HC-SR04在测量完毕之后会将结果通过Echo回响回来。
所以我们只需要将Trig口拉高,等待10us(最好再延长一些,代码中用的是15us)后再拉低即可。
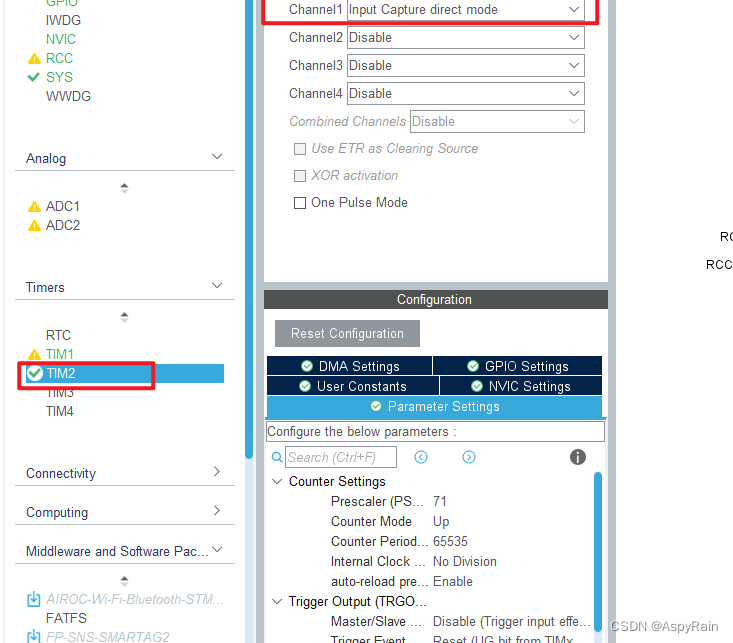
接着就只需要等待Echo将数据传输回来,通过时序图我们可以得知回响信号是拉高Echo口,再拉低,中间持续的时间就是测距的结果。
所以我们给Echo口配置一个中断事件,设置为上跳变下跳变都触发,另外再用一个变量记录Echo口到底是拉高还是拉低即可。
如果是拉高,那么我们需要记录下持续的时间,这时候我们需要用定时器计时,所以需要在一开始的时候就配置好定时器的初始化。唯一的问题就是该如何配置定时器的预分频器和自动重装器了。
根据说明书我们可以知道HC-SR04的精度为3mm,而测距的公式为 us/58-cm,稍加计算可知,如果我们需要测量3mm,那么得到的时间为17.4us,以此为一个刻度,那么定时器的频率应该为57471Hz。然而这样太麻烦了,而且也不好用,因此我们可以随意一些,我在代码中使用的是预分频器为72,自动重装器为100,那么得到的频率为72MHz/72/100=1000Hz,也就是一次定时器中断的时间为100us,而自动重装器里的每一个值就是1us,所以每次外部中断的下降沿触发之后只需要将定时器触发的次数*100再加上自动重装器里的值就可以得到回响信号的持续时间了,单位是us。
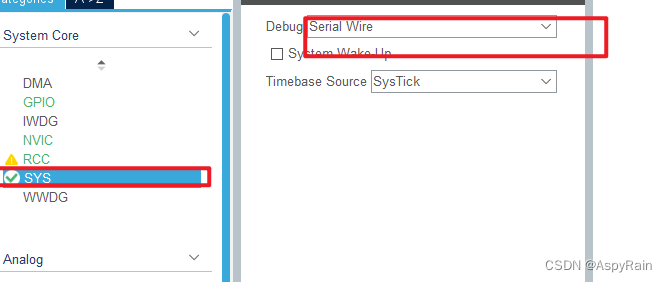
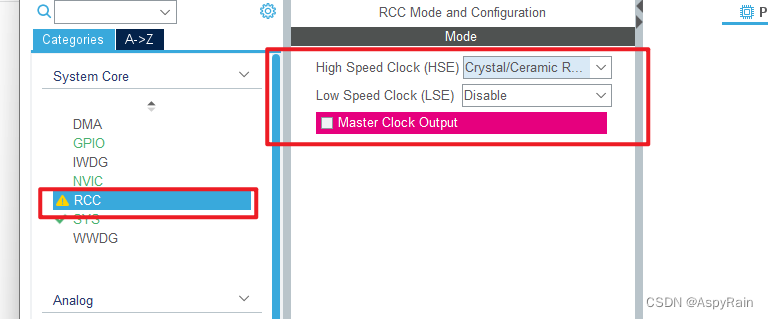
2.3 搭建编程环境
打开CubeMx,新建一个项目
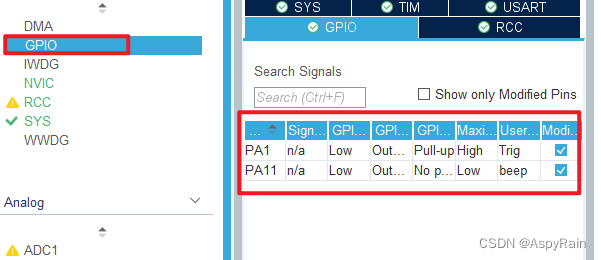
管脚配置大致如图所示
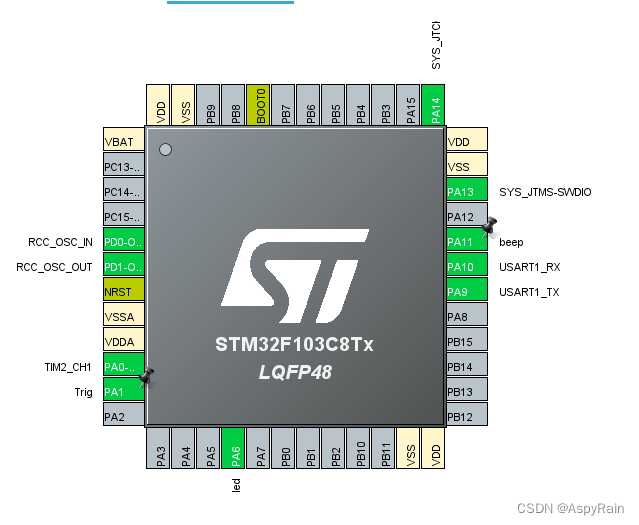
下面解释具体创建过程
led管脚
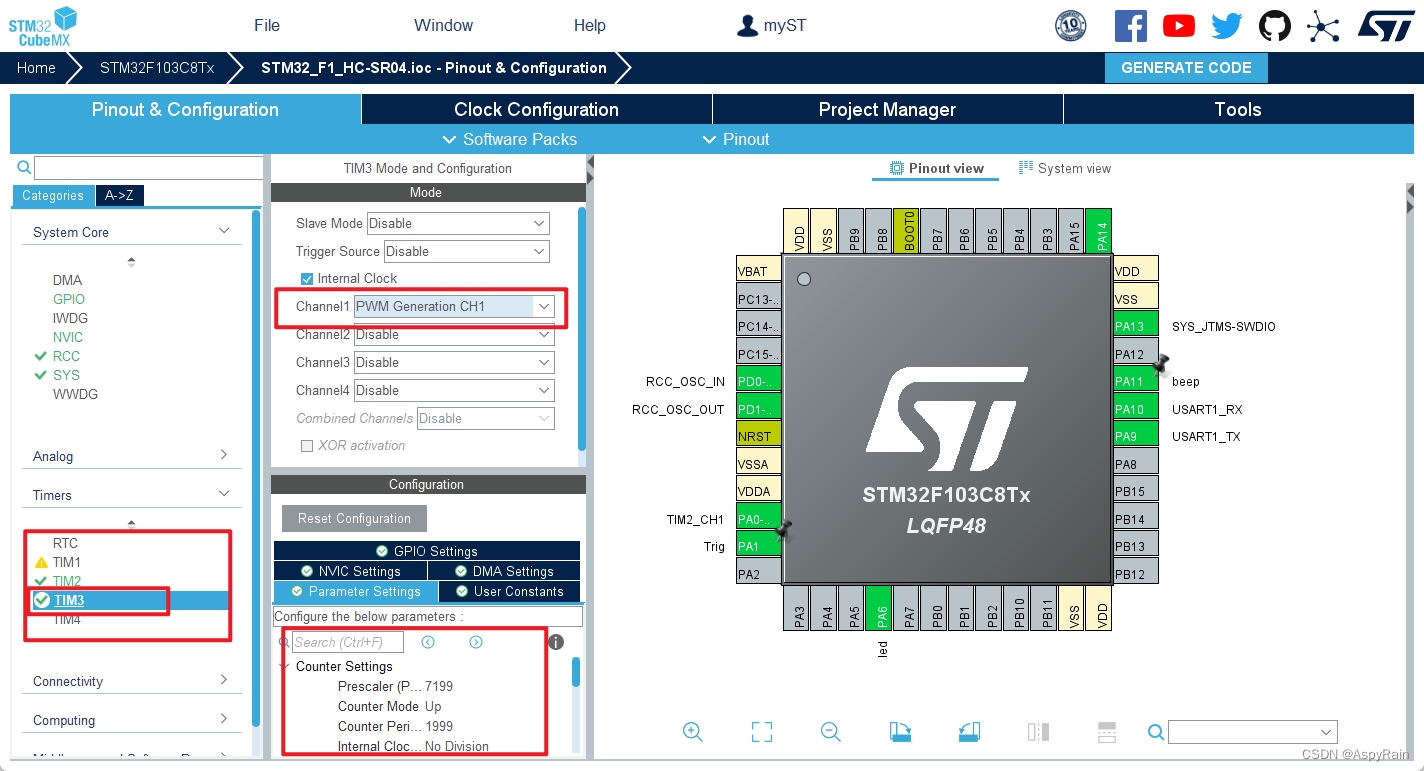
距离传感器模块获取数据
TRIG管脚,和蜂鸣器管脚
 然后导入RTThread,导入方法见链接:嵌入式RTOS多任务程序设计
然后导入RTThread,导入方法见链接:嵌入式RTOS多任务程序设计
按照教程导入项目
2.4 编写代码
注意:集成rtthread后,代码中的延时函数要进行修改,修改为基于rtthread下的延时函数(在main.c和SR04.c中有体现)
将这几个代码文件导入项目:
SR04.h
#ifndef __SR04_H
#define __SR04_H
#include "main.h"
#include "tim.h"
#include "stdio.h"
#include "rtthread.h"
#define TRIG_H HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_SET)
#define TRIG_L HAL_GPIO_WritePin(Trig_GPIO_Port,Trig_Pin,GPIO_PIN_RESET)
extern float distant;
void delay_us(uint32_t us);
void SR04_GetData(void);
void rt_hw_us_delay(rt_uint32_t us);
#endif
SR04.c
#include "SR04.h"
float distant; //测量距离
uint32_t measure_Buf[3] = {
0}; //存放定时器计数值的数组
uint8_t measure_Cnt = 0; //状态标志位
uint32_t high_time; //超声波模块返回的高电平时间
//===============================================读取距离
void SR04_GetData(void)
{
switch (measure_Cnt){
case 0:
TRIG_H;
rt_hw_us_delay(30);
TRIG_L;
measure_Cnt++;
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1) 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









