







一、资料:
1、Gighub : https://github.com/peng-zhihui
3、Gitee: Dummy-Robot: 我的超迷你机械臂机器人项目。
二、图纸(截屏)
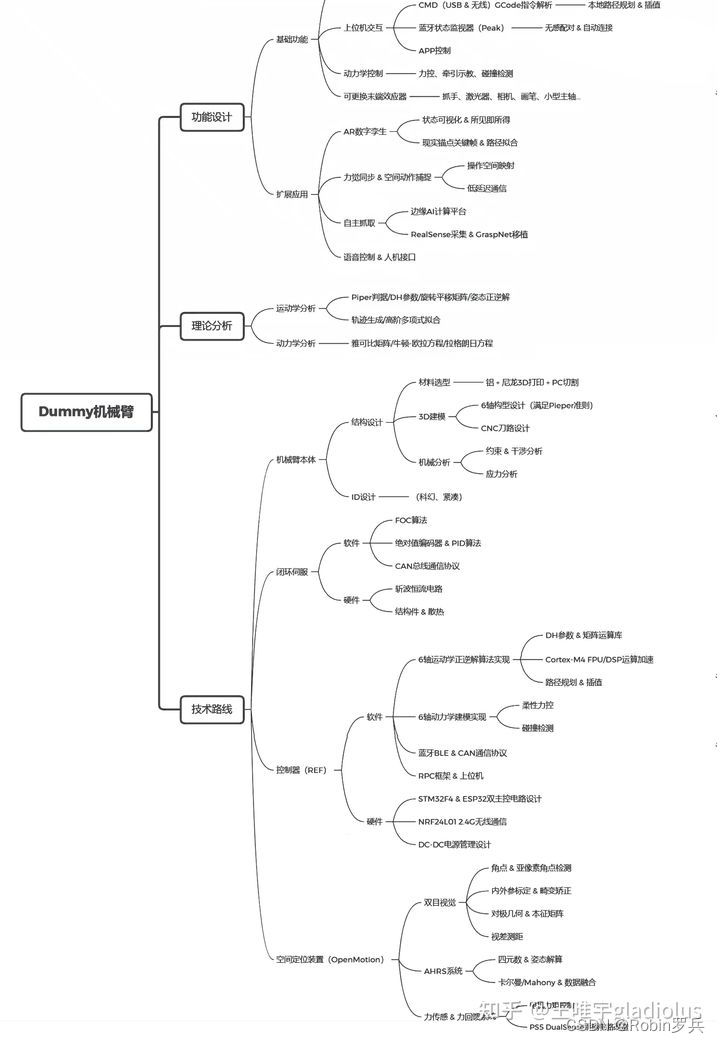
三:技术栈:
1、机体设计:基于材料学知识选择材料;基于应力分析设计轴承、连杆等的尺寸和形状;用CAD完成建模。
2、闭环伺服器:基于反馈控制原理让机械臂指哪打哪,它的理论很复杂,但在20世纪中期就已经发展完善了,例如FOC算法早在1970年代就被发明,而PID控制器则只会更早。所以这一块有成熟的模块可以用,只需要组装和调试。不过视频里说dummy使用了稚晖君之前在另一个项目中设计自制的FOC驱动器(详见“【自制FOC驱动器】深入浅出讲解FOC算法与SVPWM技术”)。
3、控制器:构建一个完整的嵌入式计算机。从在PCB板上焊接芯片和电子元件,移植嵌入式操作系统(采用LiteOS内核的鸿蒙),在其上实现蓝牙协议栈以支持CAN总线,最后编程实现6轴运动学和动力学的算法(据说还使用了机器学习中的深度学习算法),可以说是真正达到了全栈嵌入式系统工程师的水平。
4、定位装置:AR人机接口
四、反对声音:
1、稚晖君的钢铁侠机械臂没什么了不起,属于系统集成,并没技术创新 - 知乎
五、涉及知识点;
电子基础,电子元器件选型,电路原理图设计,高速电路PCB设计,电子元器件焊接技术,电路板调试,启动程序UBOOT裁剪移植,linux内核裁剪移植,文件系统,底层驱动程序(C语言,ARM架构汇编,linux内核架构),上层应用程序(C++、Qt、JAVA、Python等,深度学习,机器学习,OpenCV,神经网络,自然语言处理),静态博客服务器搭建,高等数学,线性代数,概率论,离散数学,3D建模,3D打印,雕刻机,视频拍摄后期制作,防脱发技术, 营销

















 640
640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









