







在DCDC领域,最为常见的是buck拓扑,其次是boost拓扑,而buck-boost的关注度相对较低。但是在电池供电场景日益普及的现在,升降压的需求在不断上升,现在更加关注buck-boost这个拓扑。而在所有buck-boost拓扑中,四开关buck-boost最受欢迎。
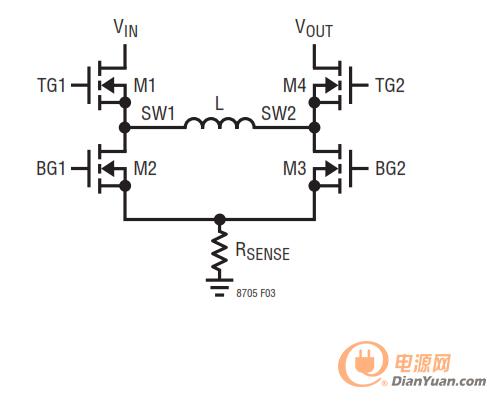
四开关buck-boost的拓扑很简单,如下图。
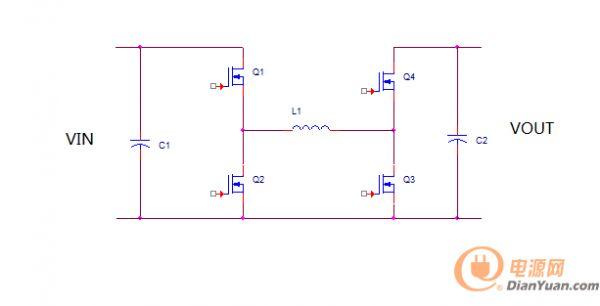
它的最大好处是可以实现正压对正压的升降压。但是对于这样一种拓扑,有多种控制方式。
一种是,对角导通方式。其逻辑是,对角线上的MOSFET,比如Q1和Q3是一对,Q2和Q4一对,是同时导通同时关断的。
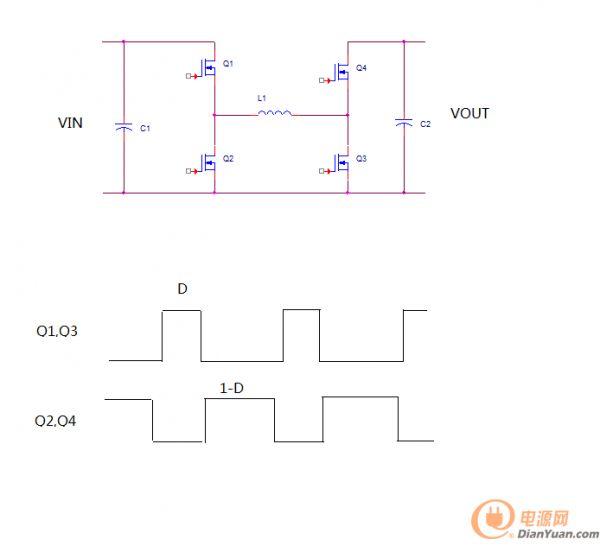
那就是Q1和Q3同时工作,Q2和Q4同时工作。并且两组MOS交替导通,如上图。
如果把Q2和Q4换成二极管,那么也是同样能工作,只不过没有同步整流而已。
对于这种控制方式,在CCM情况下我们可以得到公式:
Vin*D=Vout(1-D)也就是说,Vout=Vin*D/(1-D). 这个电压转换比和我们常见的buck-boost是一样的。

只不过常见的buck-boost的输出电压是负压,而四开关输出的是正压。
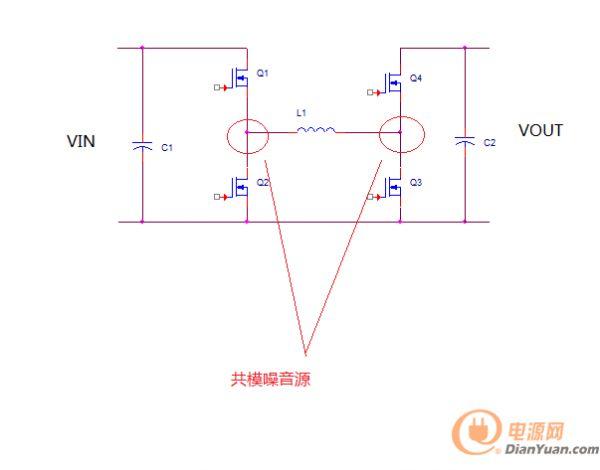
但是这种控制方式的优点是简单,没有模态切换。但是缺点是,四个管子都在一直工作,损耗大,共模噪音也大。
基于这种传统控制方式的缺点。为了提供销量和降低噪音,就演化出了第二种控制方式,就是模式切换控制方式。
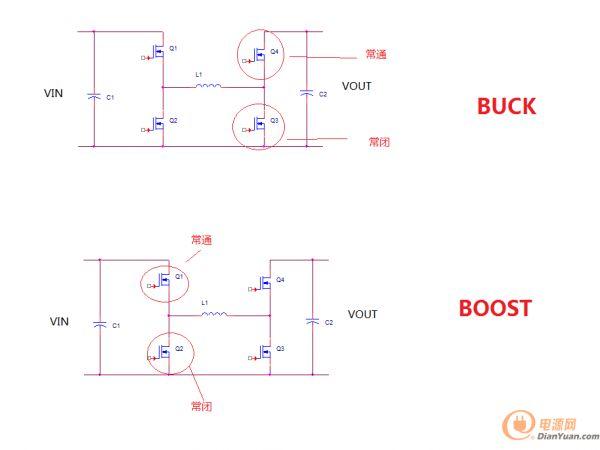
如果把四管中的Q4保持常通,Q3保持常闭。只有Q1和Q2在 不停的开关,那么这个就是典型的buck电路。
如果把四管中的Q1保持常通,Q2保持常闭。只有Q3和Q4在不停的开关,那么就是典型的boost电路。
所以这个四开关buck-boost实际上是两个基本拓扑buck和boost的组合。完全可以通过控制方式来切换这两个拓扑。
比如Vin>Vout的时候,工作在buck模式,而当Vin<Vout的时候工作在boost模式。这样就可以明显提高效率。
但是问题在于,当Vin接近Vout的时候,采用怎么样的控制方式?Vin接近Vout的时候,通常是采用四个开关一起工作的方式,也就是buck-boost模式。也就是说这个拓扑基本上有三种模态:
Vin>Vout: buck
Vin=Vout( 约等于): buck-boost
Vin<Vout: boost
随着输入电压的波动,电路会在三个模态之间切换。但是这里最大的问题是从一个模态切换到另外一个模态的时候,如何减少模态切换带来的动态响应问题。
从buck过渡到buck-boost,再过渡到boost的时候,如何做到无缝切换?
接下来,我来介绍其中一种的控制逻辑。
先假设输出为固定的12V,输入假设为一个电池,充满电电压为16V,放电结束电压为8V。
那么从输入16V开始,此时的工作状态显然是BUCK
那么四个管子的驱动信号如下图
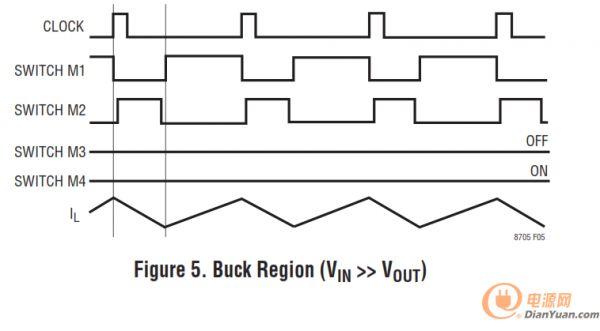
那么当输入电池电压逐渐开始降低,M1的占空比也逐渐开始增大,而M2的占空比开始减小。
此时M2的占空比是个关键的参数。
因为IC内部对M2的脉宽有个最小设定,假如说是200ns。
那么现在假设输入电压掉到12.5V,而M2的脉宽也收缩到了200ns。IC内部的逻辑电路就认为到了模态切换的时候了。
此时发生的变化是,M3和M4两个管子不再是常关和常通的状态,而是开始开关了。
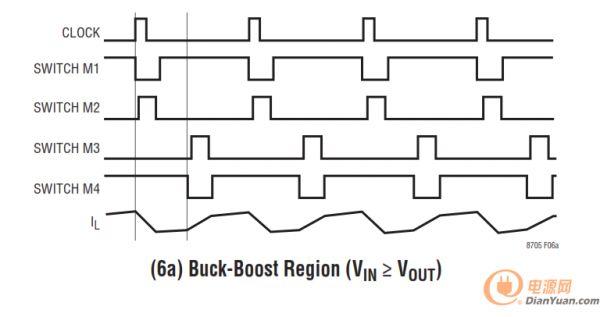
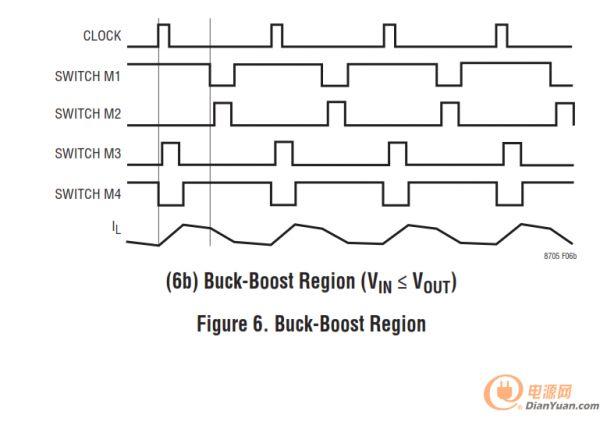
如果我们把上图进行分解,就会发现一个有趣的现象,就是
在一个clock周期里面,前半周期是buck,后半周期是boost
这个时候boost切进去的时候,M3是以最小占空比切入的,而且该占空比不可调。
此时M2的占空比则会从最小突然展宽以抵消boost模特切入的影响。在这个时候,输出会产生一个动态效应。
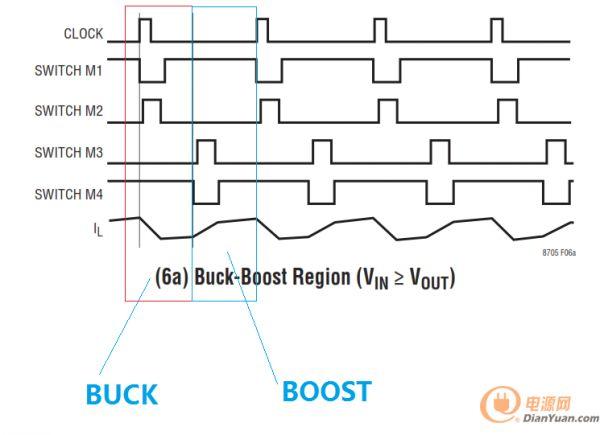
那么当输入继续下降的时候,M2的占空比会继续减小。
那么当M2再度回到最小占空比的时候,IC内部逻辑电路会认为模态需要再次转换了。
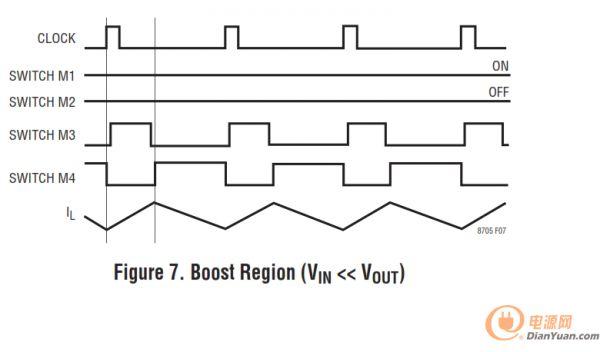
此时,M2将固定在最小占空比,而M3则开始跳出最小占空比,可以逐渐展宽。理论上来说,这个过渡应该是完全无缝的切换,
但是由于最小占空比的存在,也会对输出造成一种动态效应。
这个时候,变成了前半周期是boost,后半周期是buck。
同样,当输入电压继续降低的时候,电路会切入完全的boost模态。
这个是基本的控制逻辑,当然现在有很多的IC采用了一些改进的方式来控制模式切换。比如有些IC采用一个周期buck,一个周期boost的方式,而不是半个周期buck,半个周期boost。这样可以有效降低buck-boost模式下的开关损耗。在比如在buck-boost模式下,让buck和boost的占空比都可以调,来改善动态。
总之,四开关buck-boost 的控制方式在不断改进之中,最求更完善的模式切换和更高的效率。同时,由于四开关buck-boost完美对称的结构,在双向DCDC的应用中也广受欢迎,是一种很有应用前途的拓扑。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读
【3】CPU中的程序是怎么运行起来的 必读

















 805
805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









