






 本文详细介绍了I2C协议的基本概念,包括其工作原理、特点以及支持的不同通讯速度。接着,展示了STM32如何通过I2C与MPU6050传感器进行通信的步骤,包括初始化、发送和接收数据的详细过程。此外,还列举了用于I2C通信的关键库函数,并提供了代码示例来说明如何进行读写操作。
本文详细介绍了I2C协议的基本概念,包括其工作原理、特点以及支持的不同通讯速度。接着,展示了STM32如何通过I2C与MPU6050传感器进行通信的步骤,包括初始化、发送和接收数据的详细过程。此外,还列举了用于I2C通信的关键库函数,并提供了代码示例来说明如何进行读写操作。
目录
一丶I2C简介
(2)I2C总线上可挂在多个 I2C通讯的设备
(3)每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访问。
(4)总线通过上拉电阻接到电源。当 I2C 设备空闲时,输出高阻态,而当所有设备都空闲,都输出高阻态,上拉电阻将总线拉成高电平。
(5)多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
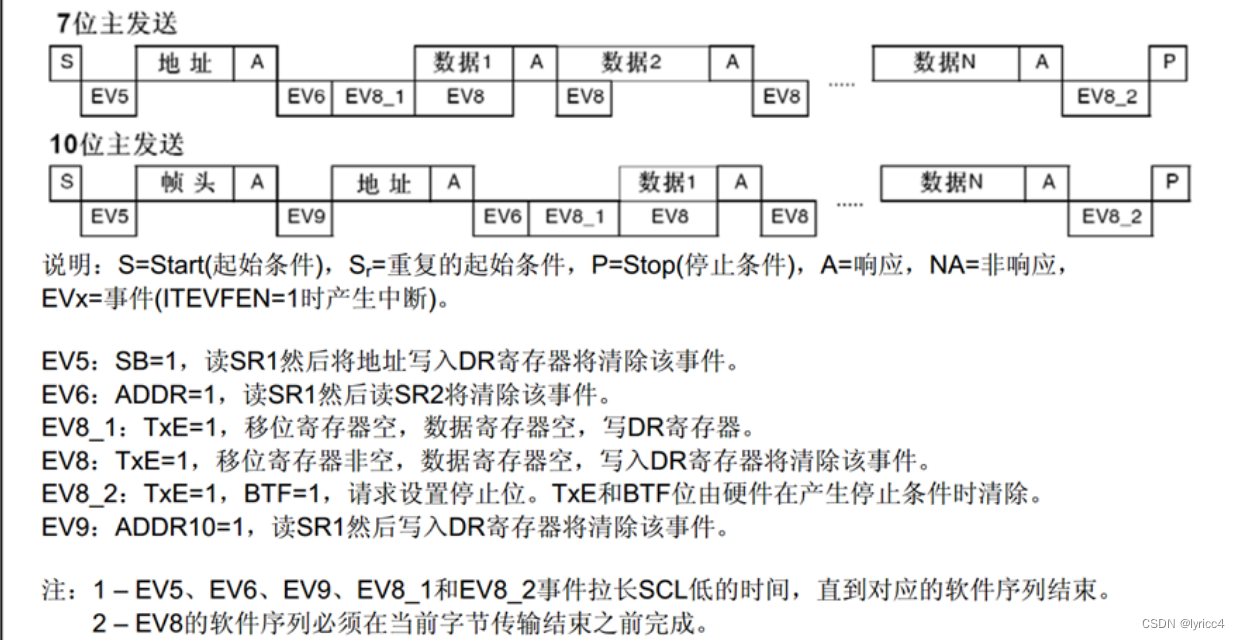
二丶读写过程
(1)发送过程
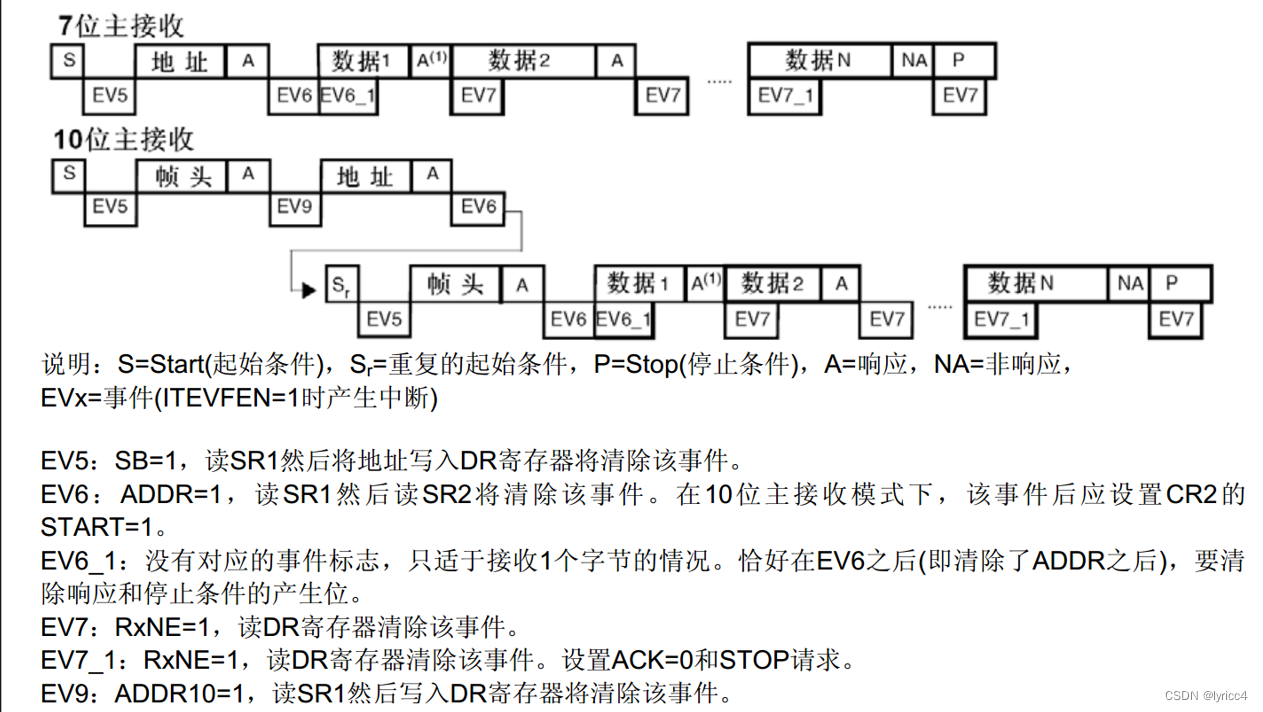
(2)接收数据
三丶库函数
(1)void I2C_Init(I2C_TypeDef* I2Cx, I2C_InitTypeDef* I2C_InitStruct);
初始化I2C
(2)void I2C_Cmd(I2C_TypeDef* I2Cx, FunctionalState NewState);
使能I2C
(3)void I2C_Cmd(I2C_TypeDef* I2Cx, FunctionalState NewState);
void I2C_DMACmd(I2C_TypeDef* I2Cx, FunctionalState NewState);
配合DMA使用
(4)void I2C_GenerateSTART(I2C_TypeDef* I2Cx, FunctionalState NewState);
void I2C_GenerateSTOP(I2C_TypeDef* I2Cx, FunctionalState NewState);
起始条件和终止条件
(5)void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx, FunctionalState NewState);
收到一个字节后是否给从机应答
(6)void I2C_OwnAddress2Config(I2C_TypeDef* I2Cx, uint8_t Address);
设置主机地址(STM32当从机使用时配置)
(7)void I2C_SendData(I2C_TypeDef* I2Cx, uint8_t Data);
uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx);
发送数据和接收数据
(8)void I2C_Send7bitAddress(I2C_TypeDef* I2Cx, uint8_t Address, uint8_t I2C_Direction);
发送从机地址(当然I2C_SendData也可以发送)
(9)I2C_CheckEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT);
检查应答位
四丶代码部分及解析(使用了MPU6050观察实验现象)
(一)I2C及MPU6050初始化部分
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS 0xD0
void MPU6050_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE); //开启GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启I2C时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; //设置为开漏复用输出(手册中要求)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIO
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //I2C模式
I2C_InitStructure.I2C_ClockSpeed = 50000; //传输速度,最大不能超过400KHZ
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; //时钟占空比
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //主机是否设置应答
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; //主机地址位数 7位或10位
I2C_InitStructure.I2C_OwnAddress1 = 0x00; //主机地址(当STM32位从机时)
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Cmd(I2C2, ENABLE);
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000;
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS)
{
Timeout --;
if (Timeout == 0)
{
break;
}
}
} //防止因为等待位进入死循环
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT); //检测EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter); //发送从机地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED); //检测EV6(发送模式)
I2C_SendData(I2C2, RegAddress); //发送从机寄存器地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING); //检测EV8
I2C_SendData(I2C2, Data); //发送数据
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //检测EV8_2
I2C_GenerateSTOP(I2C2, ENABLE); //停止发送
}
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);
I2C_SendData(I2C2, RegAddress);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED); //此上与发送数据相同
I2C_GenerateSTART(I2C2, ENABLE);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver);
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED); //检测EV6(接收模式)
I2C_AcknowledgeConfig(I2C2, DISABLE); //主机给从机应答位A
I2C_GenerateSTOP(I2C2, ENABLE); //接收数据时需要提前发送终止位
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED); //检测EV7
Data = I2C_ReceiveData(I2C2);
I2C_AcknowledgeConfig(I2C2, ENABLE);
return Data;
}
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}
(二)主函数部分
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
int main(void)
{
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
注:指定地址读时需要重复一段指定地址写的部分(即用蓝色圈出的部分)

补充:
欧拉⾓:飞机与XYZ轴的夹⾓,反应了飞机的姿态,侧仰,上倾,下倾; 获得欧拉⾓需要多个数据,常⽤的数据融合算法:互补滤波、卡尔曼滤波等 MPU6050 XCL和SDA是扩展使⽤,通常是外接磁⼒计或者⽓压计

















 774
774

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









