







特征点检测广泛应用到目标匹配、目标跟踪、三维重建等应用中,在进行目标建模时会对图像进行目标特征的提取,常用的有颜色、角点、特征点、轮廓、纹理等特征。现在开始讲解常用的特征点检测,其中Harris角点检测是特征点检测的基础,提出了应用邻近像素点灰度差值概念,从而进行判断是否为角点、边缘、平滑区域。Harris角点检测原理是利用移动的窗口在图像中计算灰度变化值,其中关键流程包括转化为灰度图像、计算差分图像、高斯平滑、计算局部极值、确认角点。
1.数学模型
当一个窗口在图像上移动,在平滑区域如图(a),窗口在各个方向上没有变化。在边缘上如图(b),窗口在边缘的方向上没有变化。在角点处如图(c),窗口在各个方向上具有变化。Harris角点检测正是利用了这个直观的物理现象,通过窗口在各个方向上的变化程度,决定是否为角点。

将图像窗口平移[u,v]产生灰度变化E(u,v)

由二元函数的泰勒级数: , 得到:
, 得到:

对于局部微小的移动量 [u,v],近似表达为:

其中M是 2*2 矩阵,可由图像的导数求得:

上式中W函数表示窗口函数,M矩阵为偏导数矩阵。对于矩阵可以进行对称矩阵的变化,假设利用两个特征值进行替代,其几何含义类似下图中的表达。在几何模型中通过判断两个特征值的大小,来判定像素的属性。
E(u,v)的椭圆形式如下图:


M为梯度的协方差矩阵 ,在实际应用中为了能够应用更好的编程,定义了角点响应函数R,通过判定R大小来判断像素是否为角点。
R取决于M的特征值,对于角点|R|很大,平坦的区域|R|很小,边缘的R为负值。
定义角点响应函数 R 为:

Harris角点检测算法就是对角点响应函数R进行阈值处理:R > threshold,即提取R的局部极大值。
(1)Harris角点检测算子对亮度和对比度的变化不敏感
这是因为在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和对亮度的抬高或下降不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。
(2)Harris角点检测算子具有旋转不变性
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值R R也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
(3)Harris角点检测算子不具有尺度不变性
如下图所示,当右图被缩小时,在检测窗口尺寸不变的前提下,在窗口内所包含图像的内容是完全不同的。左侧的图像可能被检测为边缘或曲线,而右侧的图像则可能被检测为一个角点。

3.Shi-Tomasi 算法
Shi-Tomasi 算法是Harris 算法的改进。Harris 算法最原始的定义是将矩阵 M 的行列式值与 M 的迹相减,再将差值同预先给定的阈值进行比较。后来Shi 和Tomasi 提出改进的方法,若两个特征值中较小的一个大于最小阈值,则会得到强角点。
对自相关矩阵 M 进行特征值分析,产生两个特征值 和两个特征方向向量。因为较大的不确定度取决于较小的特征值,所以通过寻找最小特征值的最大值来寻找好的特征点也就解释的通了。
和两个特征方向向量。因为较大的不确定度取决于较小的特征值,所以通过寻找最小特征值的最大值来寻找好的特征点也就解释的通了。
Shi 和Tomasi 的方法比较充分,并且在很多情况下可以得到比使用Harris 算法更好的结果。
4.FAST角点检测算法
Edward Rosten and TomDrummond 在2006年提出了一种简单快速的角点探测算法,该算法检测的角点定义为在像素点的周围邻域内有足够多的像素点与该点处于不同的区域。应用到灰度图像中,即有足够多的像素点的灰度值大于该点的灰度值或者小于该点的灰度值。
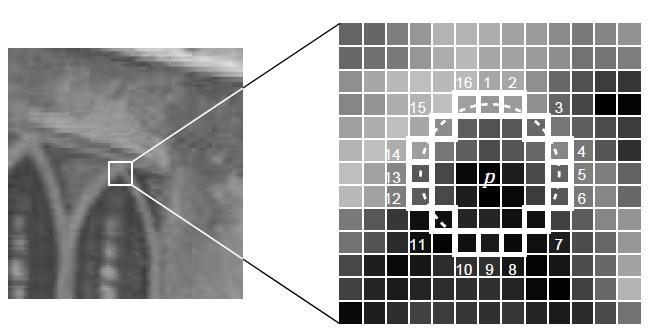
考虑下图中p点附近半径为3的圆环上的16个点,一个思路是若其中有连续的12个点的灰度值与p点的灰度值差别超过某一阈值,则可以认为p点为角点。
这一思路可以使用机器学习的方法进行加速。对同一类图像,例如同一场景的图像,可以在16个方向上进行训练,得到一棵决策树,从而在判定某一像素点是否为角点时,不再需要对所有方向进行检测,而只需要按照决策树指定的方向进行2-3次判定即可确定该点是否为角点。















 2835
2835











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









