






本篇文章主要介绍DCM(discontinuous conduction mode)下COT(constant on time)控制模式的降压变换器(Buck)的环路稳定条件。那么问题包括:
1. COT的控制逻辑是什么?
2. CCM(continuous conduction mode)下,COT控制的Buck为什么是不稳定的?
3. DCM下,COT控制的Buck在一定条件下为什么是稳定的?
4. DCM下,COT控制的Buck的定量的稳定条件是什么?
Part1 COT的控制逻辑
图1是COT控制的Buck的整体框图。
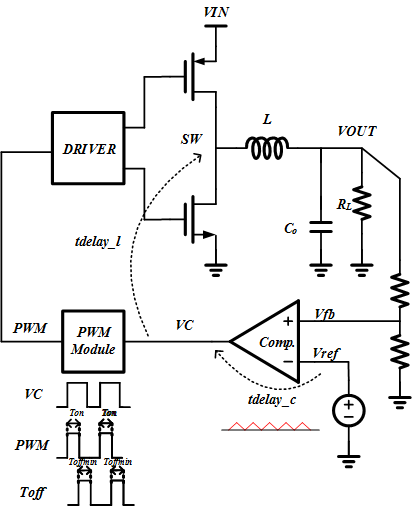
图 1
它的基本控制逻辑如图2所示。当反馈电压低于基准电压的时候,上边开关管打开,SW点变高,输出能量,让VOUT停止下降并上升;经过Ton时间之后,上边开关管关闭,下边开关管打开,SW点变低,让VOUT停止上升并下降。当VOUT下降到一定程度,即反馈电压低于基准电压,重新让SW点变高,如此循环。
这个基本控制逻辑是不完整的,SW变高Ton时间之后,如果输出不足够高,导致反馈电压仍然低于基准电压怎么办?所以需要引入一个额外的逻辑:
当上边开关管关断时(SW变高ton时间之后),如果反馈电压仍然低于基准电压,则上边功率管关断Toffmin时间之后重新打开。
事实上这个额外的逻辑并不这样做,而是:
当SW变高Ton时间之后,上边开关管强制关断Toffmin时间,Toffmin时间之后,如果反馈电压仍然低于基准电压,则上边开关管重新打开。
(大家可以对比一下两者有什么不同?)

图 2
这就是COT控制的Buck的控制逻辑。如果要跟其他控制模式进行对比的话,简单地,大家可以思考上边开关管打开和关闭的条件分别是什么就可以了。比如说定频的电压模控制的Buck,上边功率管什么时候开?时钟来的时候开(或者锯齿波快速下降的边沿);上边功率管什么时候关?反馈电压高于基准电压的时候关。
PART2 CCM下,COT控制的Buck为什么不稳定?
COT控制下的Buck不存在输出电压会飘得很高,或者直接拉低的不稳定(不会出现正反馈的情况)。COT控制下的Buck主要会存在次谐波震荡(subharmonic oscillation)的不稳定情况。
如果COT控制下的Buck不存在次谐波震荡的问题,则开关管的打开关闭完全由基本控制逻辑控制(图2),上述“额外的逻辑”并不决定上边开关管何时打开,也就是说上边功率管关断的时间肯定大于Toffmin时间。
如果COT控制下的Buck存在次谐波震荡的问题,则会存在,SW变高Ton时间,变低Toffmin,再变高Ton时间,再变低Toffmin,如此几个周期之后,SW较长一段时间变低(>Toffmin时间),然后在变高Ton,再变低Toffmin,如此循环。如图3所示。
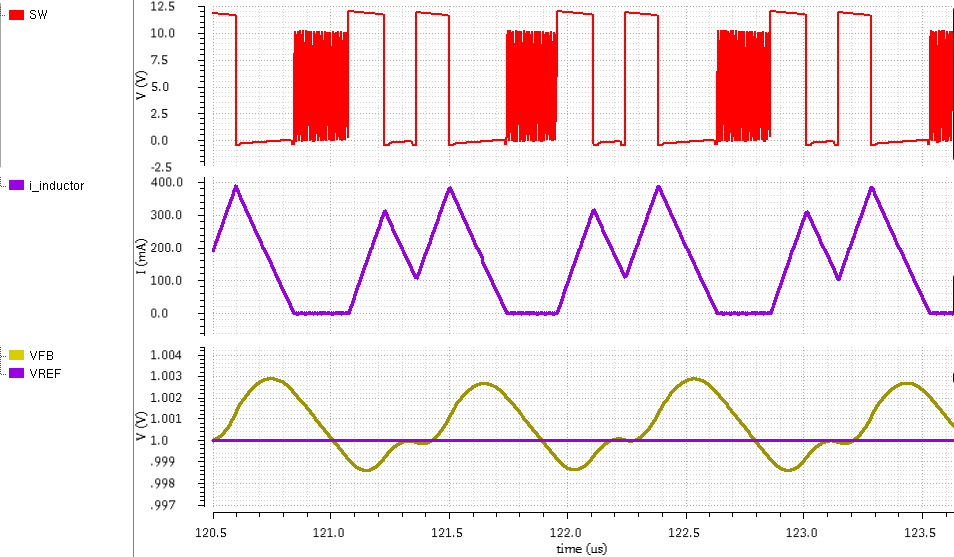
图 3
先给出结论1:CCM下的COT控制Buck如果没有任何补偿(包括电容没有ESR),且Toffmin非常非常小,几乎等于0的情况下,肯定是会出现次谐波震荡的问题。
论证逻辑是:如果不存在次谐波震荡问题,则肯定会存在一个稳定的状态。我们画出这个稳定状态,并证明它不符合控制逻辑就好了。
如果存在一个稳定的状态,则肯定如图4所示。最上面尾SW点的电压波形;中间尾电感电流波形,虚线为负载电流;最下面的红色波形为理想情况下的反馈电压波形,虚线为基准电压,橘黄色尾存在延迟情况下的波形。
理想情况下,反馈电压低于基准电压,SW翻高,并维持Ton时间。这段时间之内,电感电流上升,Buck输出的电容充放电电荷量恰好等于图中三角形S2的面积减去S1的面积。稳定情况下,这段时间内充放电电荷量恰好为零。这就意味着,SW翻高Ton时间之后,反馈电压恰好等于基准电压。如果存在一定的delay(如图橘黄色的波形所示),系统肯定会认为此时反馈电压仍然低于基准电压,根据COT的控制逻辑(此时假设Toffmin很小),SW会关断Toffmin时间之后再开一个Ton时间,而不会如图4般稳定输出。所以图4假设的稳定波形肯定不存在,结论得到证明。
再给出一个结论,Toffmin变大确实可以让次谐波震荡消失。(这时候再体会一下我给出的额外的逻辑的两种描述有什么区别。)
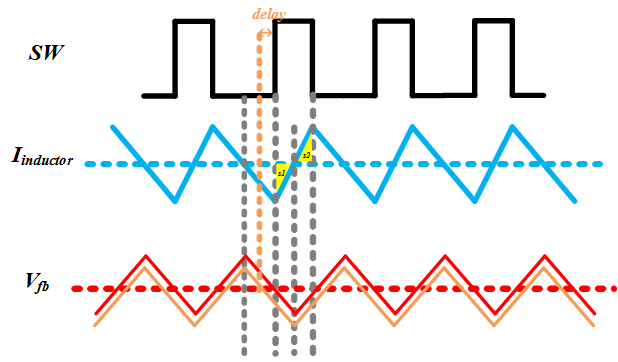
图 4
PART3 DCM下,COT控制的Buck为什么是天然稳定的?
分析方法和CCM下类似,基本上是看图说话。
先给出结论2,DCM下,如果延迟不是很大的情况下,COT控制的Buck是天然稳定的。
证明这个结论的逻辑是:先给出一个稳定的状态,证明这种状态是存在的;然后证明出现一个扰动的情况下,会回到这种状态。
稳定状态如图5所示。DCM模式下,S2的面积肯定大于S1面积,意味着当SW维持Ton之后,反馈电压已经高于基准电压了,此时不会额外的逻辑不起作用,所以不存在次谐波震荡的问题。
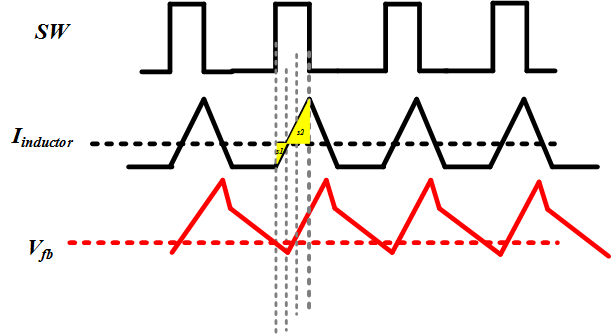
图5
如果出现一个扰动,如图6所示。绿色线为在SW变高时刻(为了方便,随便找的一个时刻),输出出现向上扰动时的波形;蓝色线为在SW变高时刻,输出出现向下扰动时的波形。可以观察得到,对于这种扰动,都在一个周期之内就恢复到了稳定状态,这就说明了,其他状态都收敛于这个稳定态,由此证明了结论2。

图6
PART4 DCM下,COT控制的Buck的稳定条件
这一部分是定量的计算,没兴趣可以不看。根据图1的拓扑,PWM波的输出逻辑由PWM Module模块控制。实际输出的PWM波到SW翻转存在一个tdelay_l的延迟。tdelay_c比较器的延迟。图7是波形的分析。VC为比较器输出,PWM为PWM Module的输出。Toffmin尾PWM Module的内部控制波形。
PWM波翻高的逻辑是:Toffmin=0&Vc=1;PWM波翻低的逻辑是:翻高Ton时间之后自然翻低。
由图可知,如果toffmin小于toffmin_min,则PWM就会在变低Toffmin之后马上开启,导致次谐波震荡的发生(如图橘黄色波形所示)。因此稳定的条件是:
toffmin>toffmin_min
toffmin_min=tdelay_c+t1+tdelay_l−ton
t1怎么计算呢,t1+tdelay_c+tdelay_l时间内,电容充放电的电荷量为0,由此可得:
∫0tdelay_c+tdelay_l(−iload)dt+∫0t1(vin−voutLt−iload)dt=0
令tdelay=tdelay_c+tdelay_l,由此在可以解出:
toffmin_min和tdelay之间的关系。而这就是DCM情况下,COT控制Buck的稳定条件。
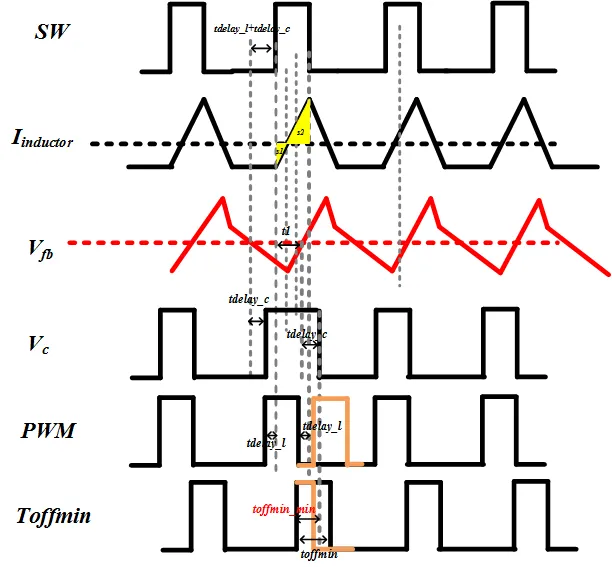
图7
文章可能有错误的地方,还望大家批评指正。转载请先私信。


















 7502
7502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









