







前言
本次的探索是从激光雷达拆开上电开始,到SLAM图建立的过程,中间涉及的专业性知识,比如订阅与发布之类的,可以在B站搜索ROS进行学习
正文
前提条件
Ubuntu20.04(不要使用21.04,这是个大坑)
YDLIDAR X2 激光雷达(包括转接器,usb转type-c线,以及雷达本体)
一个善于思考的大脑和一双手
资料引用`
https://ydlidar.cn/service_support/download.html
官方资料支持
https://blog.csdn.net/zhu751191958/category_7380985.html
感谢这位大佬的整理
https://blog.csdn.net/r1141207831/article/details/106327172
20.04版本的ROS(包括rviz)安装
在Ubuntu20.04中安装ROS Noetic(包括可视化的rviz)
在20.04版本下,最最最推荐安装Noetic(此版本为Ubuntu20.04使用)版本
1、添加 sources.list(设置你的电脑可以从 packages.ros.org 接收软件.)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2、添加 keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、安装,首先,确保你的Debian软件包索引是最新的:
sudo apt update
4、安装桌面完整版 : 包含ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及2D/3D感知
sudo apt install ros-noetic-desktop-full
5、您必须在使用ROS的每个bash终端中获取此脚本的源代码。
source /opt/ros/noetic/setup.bash
6、环境配置
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
至此已经在Ubuntu20.04的系统中完整安装ROS Noetic。
ROS的启动和使用
在一个控制台下使用
roscore
启动整个ROS服务,其子服务在本控制台不关闭的情况下重新打开新的控制台使用
rosrun rviz rviz
打开rviz

至此,我们需要的软件完成
在ubuntu20.04下安装X2L的SDK以及驱动包
注意,在这里,我们的根目录是cd ~目录
安装官方SDK
$ git clone https://github.com/YDLIDAR/YDLidar-SDK.git
$ cd YDLidar-SDK
$ cmake .
$ make
$ sudo make install
这里官方说是build,然而并没有这个文件夹,所以我修改了一下
ROS驱动包安装
依旧是在cd ~目录
1) 克隆github的ydlidar_ros_driver软件包:
$ git clone https://github.com/YDLIDAR/ydlidar_ros_driver.git ydlidar_ws/src/ydlidar_ros_driver
这里其实是创建了一个目录~/ydlidar_ws/src/这也是我们项目的目录(工作空间)
2) 构建ydlidar_ros_driver软件包:
$ cd ydlidar_ws
$ catkin_make
3) 软件包环境设置:(这个步骤后面也会设置)
$ source ./devel/setup.sh
注意:添加永久工作区环境变量。如果每次启动新的shell时ROS环境变量自动添加到您的bash会话中,将很方便:
$ echo "source ~/ydlidar_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
4) 确认要确认已设置您的软件包路径,请回显该ROS_PACKAGE_PATH变量。
$ echo $ROS_PACKAGE_PATH
**您应该看到类似以下内容:/home/tony/ydlidar_ws/src:/opt/ros/melodic/share**
创建串行端口别名[可选]
$ chmod 0777 src/ydlidar_ros_driver/startup/*
$ sudo sh src/ydlidar_ros_driver/startup/initenv.sh
现在,我们运行一下
使用启动文件运行ydlidar_ros_driver,例子如下:
$ roslaunch ydlidar_ros_driver X2.launch
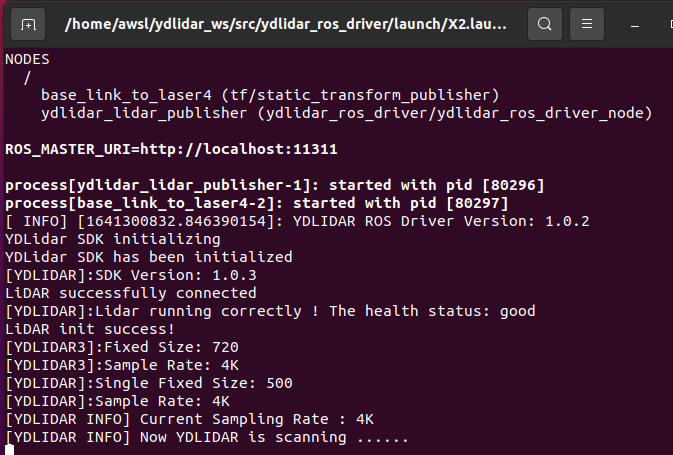
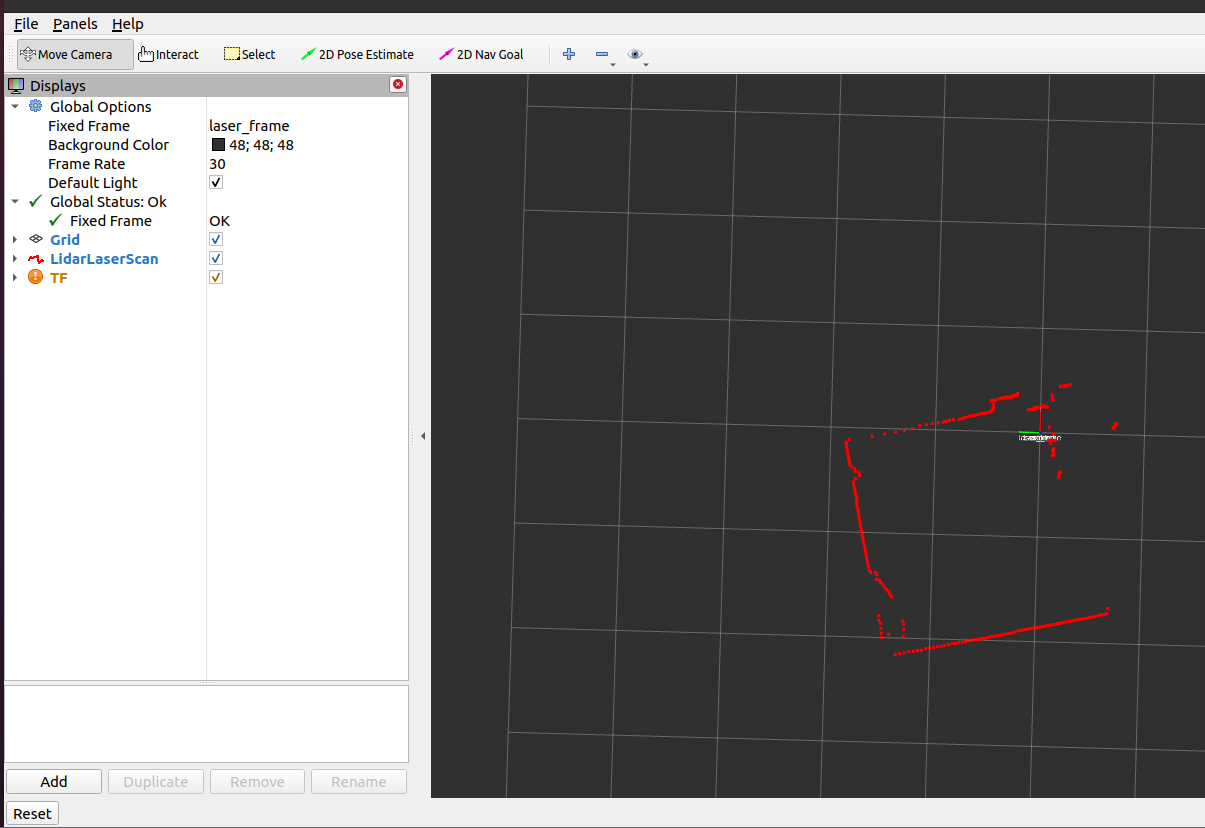
雷达被顺利驱动,我们现在将它展示到RVIZ上。
修改一处地方,文件默认以G4雷达为例,若使用其它型号雷达,需将lidar_view.launch文件中的lidar.launch改为对应的**.launch文件。(如使用X2雷达,需改成X2.launch)

之后
$ roslaunch ydlidar_ros_driver lidar_view.launch
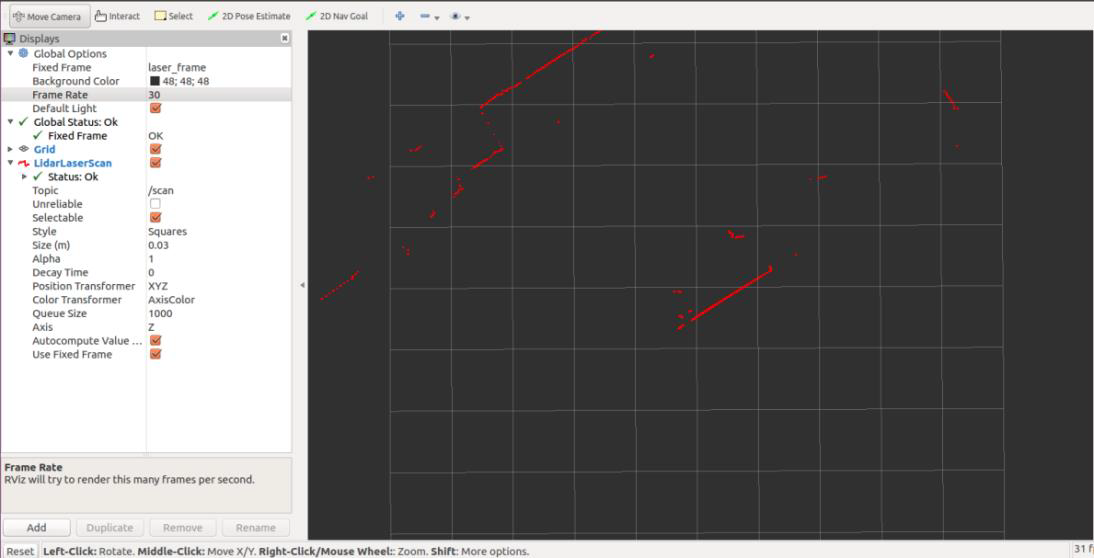
注意!!!
1)在运行roslaunch ydlidar_ros_driver lidar_view.launch 这句代码时,应该另外打开控制台。
2)请确保在运行roslaunch ydlidar_ros_driver lidar_view.launch 之前roslaunch ydlidar_ros_driver X2.launch 已经运行,这句话的意思是,这两句指令不能同时运行,一次只能使用一个。
绘制SLAM图(使用hector_slam)建图
现在,我们的~/ydlidar_ws/src/以其其资源驱动应该已经存在了
在工作空间目录下下载gmapping与laser_scan_matcher以及依赖csm的源码包:
cd ~/ydlidar_ws/src
git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam
cd ~/ydlidar_ws
catkin_make
修改发布内容,这部份涉及专业内容,需要了解ROS的发布
cd ~/ydlidar_ws/src/hector_slam/hector_slam_launch/launch/
sudo vim All_nodes.launch
编写以下代码
<?xml version="1.0"?>
<launch>
<include file="$(find ydlidar_ros_driver)/launch/X2.launch" />
<node pkg="tf" type="static_transform_publisher"
name="map_to_odom" args="0.0 0.0 0.0 0 0 0.0 /odom /base_link 40"/>
<node pkg="tf" type="static_transform_publisher"
name="base_frame_laser" args="0 0 0 0 0 0 /base_link /laser_frame 40" />
<!--<node pkg="rviz" type="rviz" name="rviz"args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>-->
<include file="$(find hector_mapping)/launch/mapping_default.launch" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find ydlidar_ros_driver)/launch/lidar.rviz" />
<include file="$(find hector_geotiff_launch)/launch/geotiff_mapper.launch" />
</launch>
$(find ydlidar_ros_driver)就是找激光雷达的驱动文件,
<include file="$(find ydlidar_ros_driver)/launch/X2.launch" />是用来找驱动文件的,
根据自己的情况来
修改mapping
进入hector_mapping/launch文件夹下
cd ~/ydlidar_ws/src/hector_slam/hector_mapping/launch
备份原文件为mapping_default_backups.launch
cp mapping_default.launch ./mapping_default_backups.launch
打开mapping_default.launch
修改为
<?xml version="1.0"?>
<launch>
<arg name="tf_map_scanmatch_transform_frame_name" default="/scanmatcher_frame" />
<arg name="base_frame" default="base_link" />
<arg name="odom_frame" default="base_link" />
<arg name="pub_map_odom_transform" default="true" />
<arg name="scan_subscriber_queue_size" default="5" />
<arg name="scan_topic" default="scan" />
<arg name="map_size" default="2048" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="map_frame" value="map" />
<param name="base_frame" value="$(arg base_frame)" />
<param name="odom_frame" value="$(arg base_frame)" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true" />
<param name="use_tf_pose_start_estimate" value="false" />
<param name="pub_map_odom_transform" value="$(arg pub_map_odom_transform)" />
<!-- Map size / start point -->
<param name="map_resolution" value="0.050" />
<param name="map_size" value="$(arg map_size)" />
<param name="map_start_x" value="0.5" />
<param name="map_start_y" value="0.5" />
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4" />
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2" />
<param name="map_update_angle_thresh" value="0.9" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true" />
<param name="scan_subscriber_queue_size" value="$(arg scan_subscriber_queue_size)" />
<param name="scan_topic" value="$(arg scan_topic)" />
<!-- Debug parameters -->
<!--
<param name="output_timing" value="false" />
<param name="pub_drawings" value="true" />
<param name="pub_debug_output" value="true" />
-->
<param name="tf_map_scanmatch_transform_frame_name" value="$(arg tf_map_scanmatch_transform_frame_name)" />
</node>
<!--<node pkg="tf" type="static_transform_publisher" name="map_nav_broadcaster" args="0 0 0 0 0 0 map nav 100" />-->
</launch>
重新编译
cd ~/ydlidar_ws
catkin_make
添加环境配置
source ~/ydlidar_ws/devel/setup.bash
运行
确保ROS核心开启
另起控制台
roslaunch hector_slam_launch All_nodes.launch
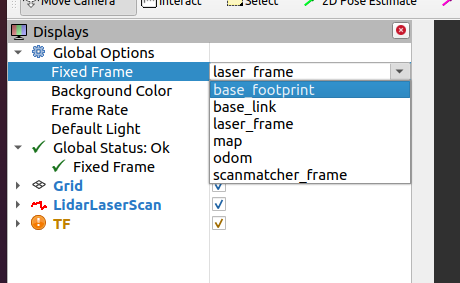
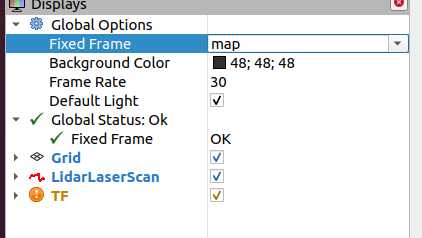
点击add,选中map

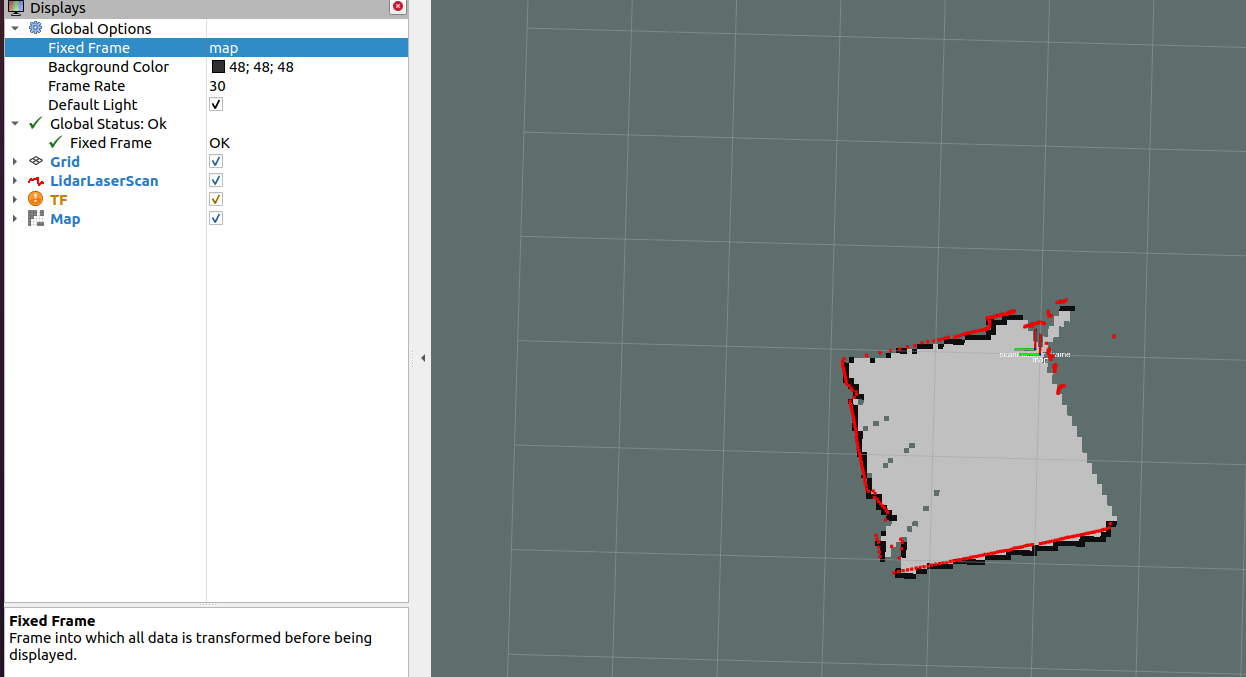
至此,阶段性数据完成。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









