







这里展示了 NodeMCU 如何通过生成 PWM 信号来控制直流电机速度。一个外部电位计连接到 NodeMCU,用于设置 PWM 信号的占空比。
ESP8266 NodeMCU单片机
NodeMCU( Node M icro C ontroller Unit )是一块可以基于 ESP8266 SoC 或 ESP32 SoC 的开发板。下图为32位Lolin型ESP8266 NodeMCU开发板。
此处使用的基于 ESP8266 SoC(片上系统)的 NodeMCU 可以创建基于物联网 (IoT) 的应用程序。NodeMCU 使传感器和执行器等设备能够连接到 WiFi 网络和互联网,它支持 SPI、I2C 等各种通信协议,它可以感知和获取外部模拟信号,可以测量外部事件,可以执行正常的数字 I /O,可以产生PWM信号等等。
下面是一些 NodeMCU 硬件特性。
- 工作电压为 3.3V。
- 它有内部 3.3V 稳压器。
- 可提供 4.5V 至 10V。
- CPU频率为80MHz。
- 它具有 4MB 闪存和 64KB SRAM 内存。
- 它有 11 个数字引脚
- 它有 1 个模拟引脚,ADC(模数转换器)范围从 0.3V 到 3.3V。
- 它支持 802.11 b/g/n WiFi 协议。
- 为USB接口,采用CH340G USB转串口转换器IC。
- 支持1个SPI、2个USART、1个I2S和1个I2C接口。
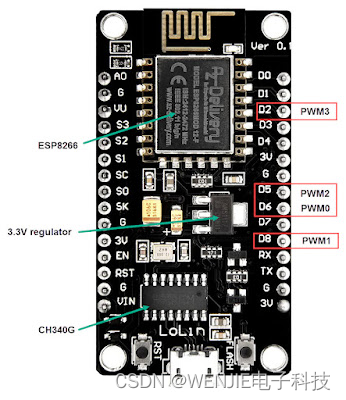
NodeMCU PWM 引脚
Lolin NodeMCU 有 4 个 PWM 引脚,如下图所示。
L298N电机驱动器
一些大型电机可能需要高电流,因此直流电机驱动器用于在电机额定电压下提供更多电流。这里我们将使用L298N电机驱动IC(集成电路)来驱动额定电流低于2A的12V直流电机。
L298N电机驱动IC如下图所示。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1724
1724











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









