








算法:
动规五部曲:
1.确定dp及下标
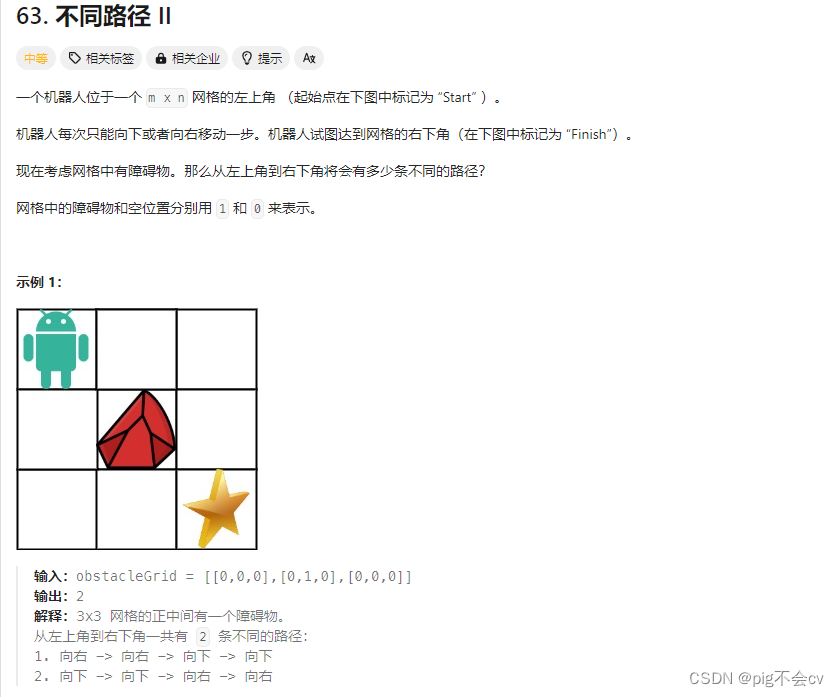
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
2.确定递归公式
dp[i][j] = dp[i - 1][j] + dp[i][j - 1]
当没有障碍时,才能这么推
if (obstacleGrid[i][j] == 0) { // 当(i, j)没有障碍的时候,再推导dp[i][j]
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}3.dp初始化
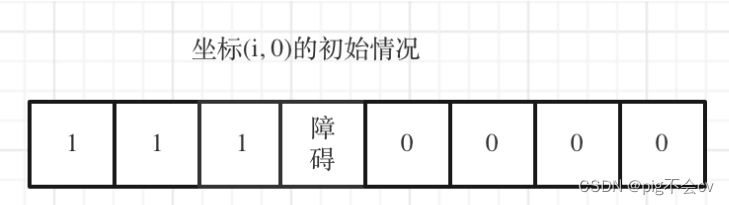
从(0, 0)的位置到(i, 0)的路径只有一条,所以dp[i][0]一定为1,dp[0][j]也同理。
但如果(i, 0) 这条边有了障碍之后,障碍之后(包括障碍)都是走不到的位置了,所以障碍之后的dp[i][0]应该是0。
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) {
dp[i][0] = 1;
}
for (int j = 0; j < n && obstacleGrid[0][j] == 0; j++) {
dp[0][j] = 1;
}4.确定遍历顺序
从递归公式dp[i][j] = dp[i - 1][j] + dp[i][j - 1] 中可以看出,一定是从左到右一层一层遍历,这样保证推导dp[i][j]的时候,dp[i - 1][j] 和 dp[i][j - 1]一定是有数值。
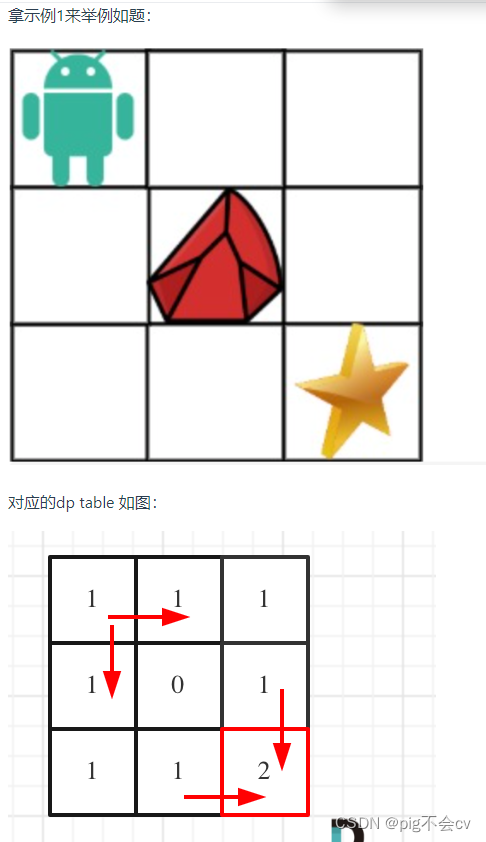
5.举例推导dp数组
正确代码:
class Solution {
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
//行数
int m = obstacleGrid.length;
//列数,obstacleGrid[0]的长度就等于列数
int n = obstacleGrid[0].length;
int dp[][] = new int[m][n];
//若障碍物在(0,0)或者终点,直接走不了了
if(obstacleGrid[0][0]==1 || obstacleGrid[m-1][n-1]==1) return 0;
//初始化
for(int i=0; i<m; i++){
if(obstacleGrid[i][0]==0){
dp[i][0]=1;
}else{
break;
}
}
for(int j=0; j<n; j++){
if(obstacleGrid[0][j]==0){
dp[0][j]=1;
}else{
break;
}
}
//遍历
for (int i=1; i<m; i++){
for(int j=1; j<n; j++){
if(obstacleGrid[i][j]==1){continue;}
dp[i][j] = dp[i-1][j]+dp[i][j-1];
}
}
return dp[m-1][n-1];
}
}注意:
1.若障碍物在起点或终点,怎么走都行不通。return 0
2.初始化时:
(1)正确遍历方式
for(int i=0; i<m; i++){
if(obstacleGrid[i][0]==0){
dp[i][0]=1;
} else {
break; // 如果有障碍物,我们无法继续前进
}
} 在遍历 `i` 的过程中,如果 `obstacleGrid[i][0]` 不是障碍物,就将 `dp[i][0]` 设置为 1。但是,如果 `obstacleGrid[i][0]` 是障碍物,那么循环将会中断(`break`),因为我们无法继续向下遍历,因为在第一列中遇到了障碍物。
(2)错误遍历方式
若不加else。。break,则会报错:
for(int i=0; i<m; i++){
if(obstacleGrid[i][0]==0){
dp[i][0]=1;
}
} 在遍历 `i` 的过程中,如果 `obstacleGrid[i][0]` 不是障碍物,就将 `dp[i][0]` 设置为 1。不同之处在于,即使 `obstacleGrid[i][0]` 是障碍物,循环仍会继续,不会中断。这意味着即使在第一列中遇到了障碍物,仍然会继续向下遍历,继续赋值。
(3)正确遍历方式也可写为:
for (int i = 0; i < m && obstacleGrid[i][0] == 0; i++) dp[i][0] = 1;它使用了循环的条件部分和循环体内的条件判断,来实现了与(1)相同的逻辑。
当 `i` 小于 `m` 且 `obstacleGrid[i][0]` 等于 0 时,执行 `dp[i][0] = 1`,然后增加 `i` 的值。这样,只要 `obstacleGrid[i][0]` 是 0,就会持续更新 `dp[i][0]` 直到条件不再满足。
时间空间复杂度:
- 时间复杂度:O(n × m),n、m 分别为obstacleGrid 长度和宽度
- 空间复杂度:O(n × m















 747
747











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









