







图机器学习(图神经网络的应用)
1. Graph Augmentation for GNNs
1. 为什么要做图增强
我们在之前都假设原始数据和应用于GNN的计算图一致,但很多情况下原始数据可能不适宜于GNN:
-
特征层面:输入图可能缺少特征(也可能是特征很难编码)→特征增强
-
结构层面:
-
图可能过度稀疏→导致message passing效率低(边不够嘛)
-
图可能过度稠密→导致message passing代价太高(每次做message passing都需要对好几个节点做运算)
-
图可能太大→GPU装不下
-
-
事实上输入图很难恰好是适宜于GNN(图数据嵌入)的最优计算图
2. 图增强方法
- 图特征:输入图缺少特征→特征增强
- 图结构:
1. 图过于稀疏→增加虚拟节点/边
2. 图过于稠密→在message passing时抽样邻居
3. 图太大→在计算嵌入时抽样子图
2. 图特征增强Feature Augmentation
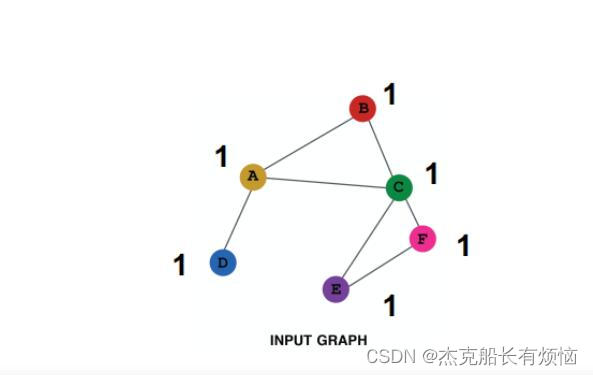
1. 应对图上缺少特征的问题(比如只有邻接矩阵),标准方法:
- constant:给每个节点赋常数特征
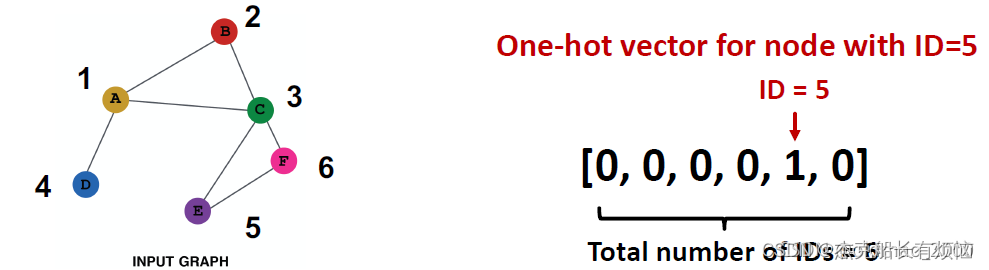
- one-hot:给每个节点赋唯一ID,将ID转换为独热编码向量的形式(即ID对应索引的元素为1,其他元素都为0)
- 两种方案对比如下表
| constant node feature | one-hot node feature | |
|---|---|---|
| 表示能力 | 中等:所有节点都一样,但是GNN仍然可以学到图结构信息 | 高:每个节点ID唯一,所以可以储存节点特有的信息 |
| 归纳能力 | 高:对新节点再赋这个常数就行 | 低:无法泛化到新节点上,因为对新节点再赋ID的话,GNN无法嵌入这个新ID |
| 计算力代价 | 低:只有一维特征 | 高:O(v)维特征,无法应用到大型图上 |
| 适用情况 | 所有图,inductive(归纳) | 小图,transductive(直推) |
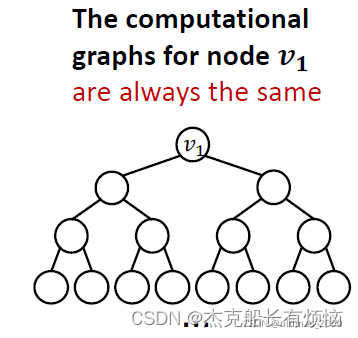
2. 有些图结构GNN很难学习到
如
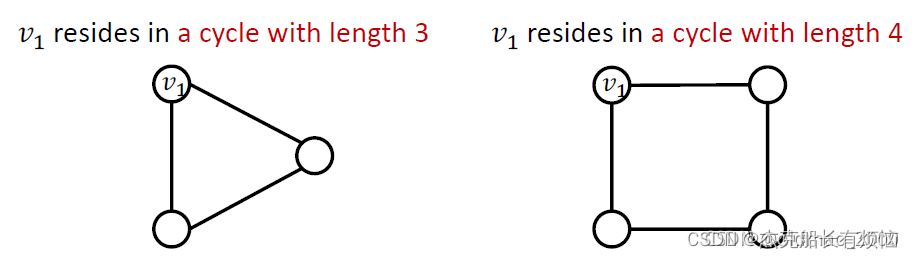
两个图中的 v 1 v_1 v1节点度都是2,以 v 1 v_1 v1节点做出来的计算图都是一样的二叉树
解决方案是吧cycle count直接作为特征加入到节点信息里面去,采用one hot编码即可
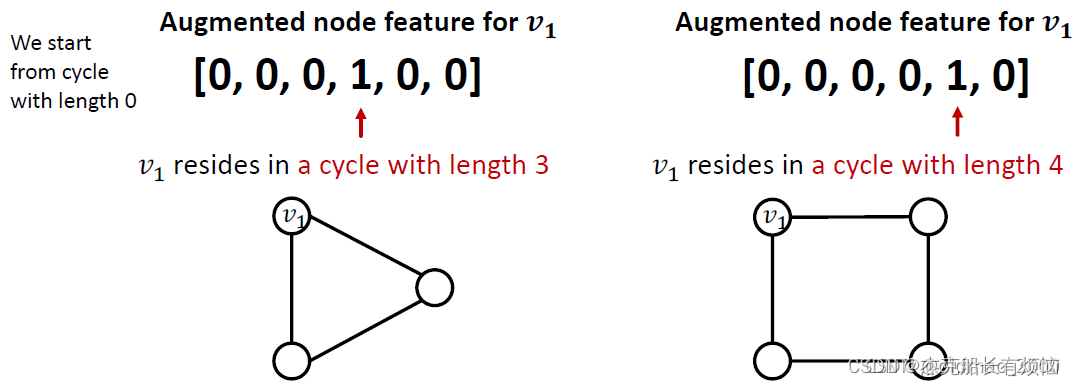
另外还可以加入其他的特征:Node degree、 Clustering coefficient、PageRank、 Centrality
3. 图结构增强Structure Augmentation
1. 对稀疏图:增加虚拟边virtual nodes或虚拟节点virtual edges
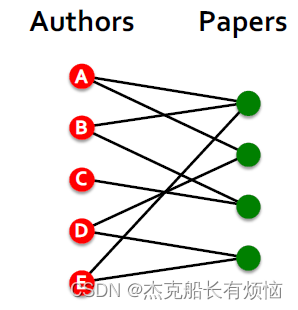
- 虚拟边:在2-hop邻居之间增加虚拟边
直观上:在GNN计算时不用邻接矩阵A,而用 A + A 2 A+A^2 A+A2( A 2 A^2 A2的每个元素是对应节点队之间长度为2的路径数量)
适用范围:bipartite graphs(二部图)
如作者-论文组成的bipartite graph,增加虚拟边可以在合作作者或者同作者论文之间增加链接。这样GNN可以浅一些,训练也会更 快一些(因为在同类节点之间可以直接交互了)但如果添的边太多了也会增加复杂性
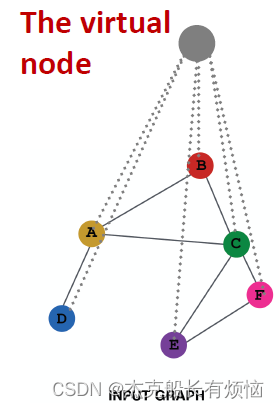
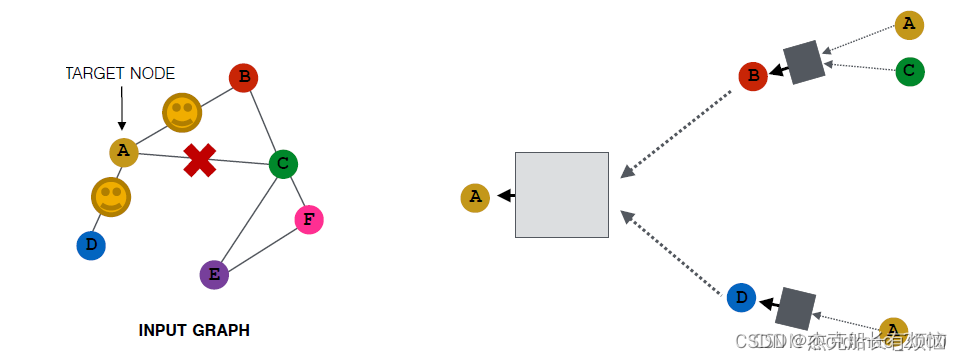
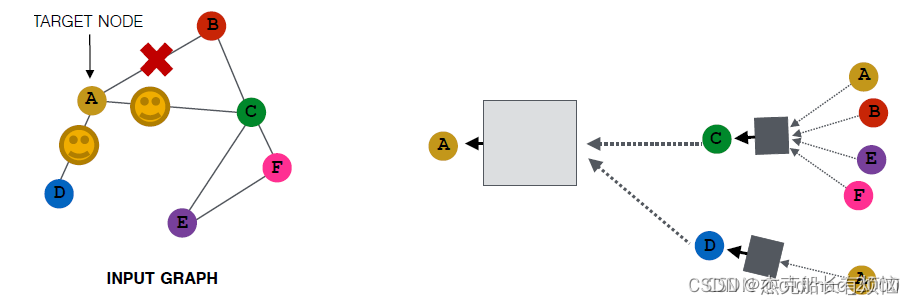
- 虚拟节点:增加一个虚拟节点,这个虚拟节点与图(或者一个从图中选出的子图)上的所有节点相连这会导致所有节点最长距离变成二(节点A-虚拟节点-节点B)
优点:稀疏图上消息(message passing)大幅提升
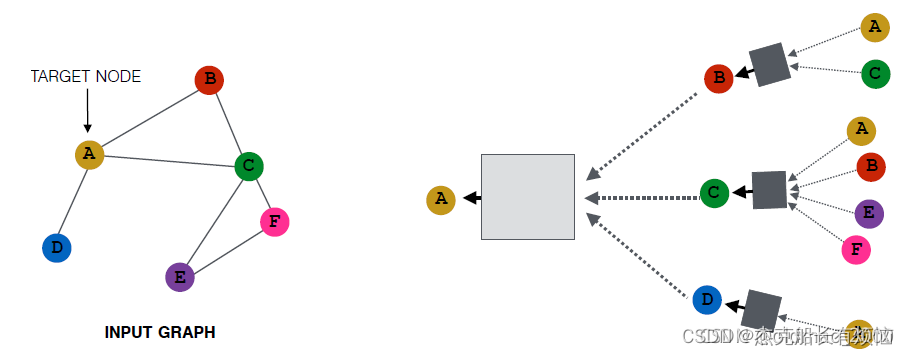
2. 对稠密图:节点邻居抽样
在消息传递的过程中,不使用一个节点的全部邻居,而改为抽样一部分邻居。
例如:
先前如:
可能变成:
当然,采样是随机的,所有还有可能是:
优点:计算图变小(大大减少运算量)
缺点:可能会损失重要信息(因为有的邻居直接不用了嘛)
当然可以采用抽样不同的邻居来增加模型的鲁棒性
4. Prediction with GNNs
1.回顾
到目前为止,我们已经围绕着node embedding展开了一系列的方法的讨论
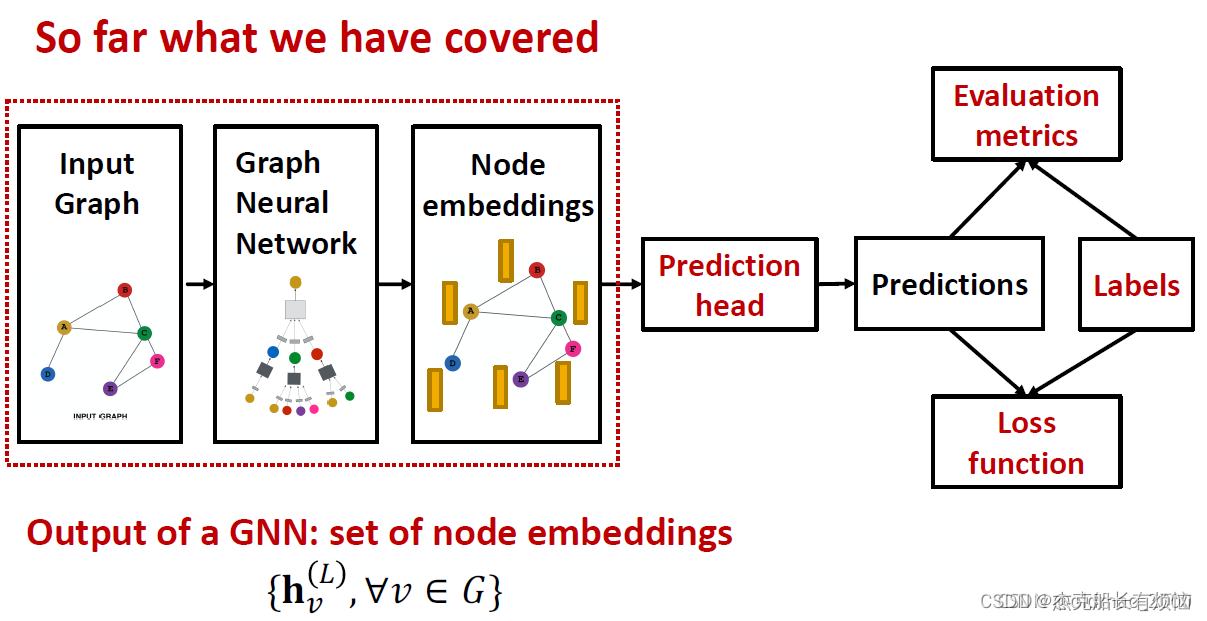
2. Prediction Heads:预测目标向量:k维
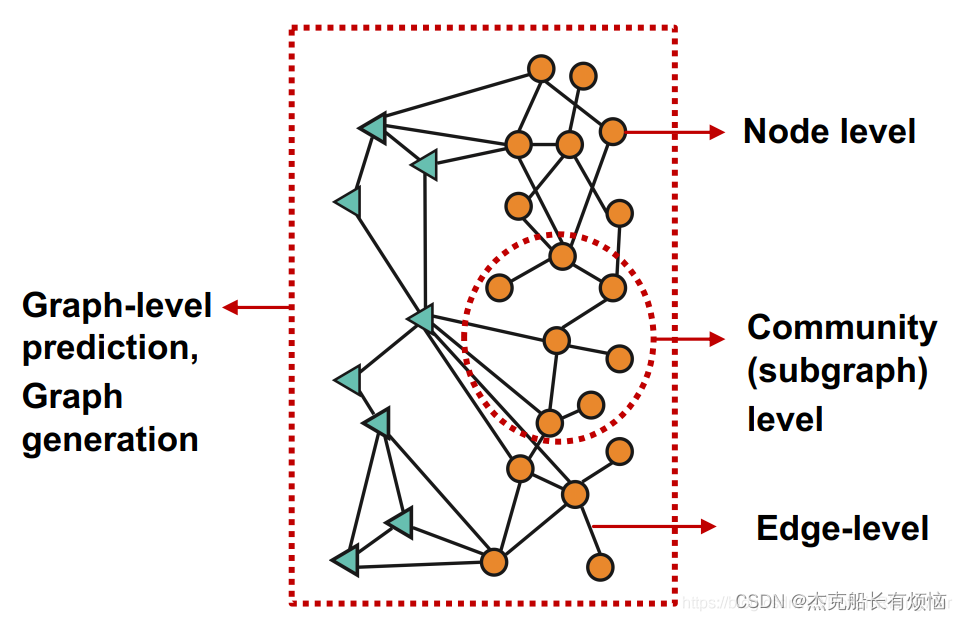
这里第一次看到用Head来代表函数,不同粒度下的prediction head:节点级别,边级别,图级别
1. 节点级别:直接用节点嵌入做预测
分类任务:在k个类别之间做分类
回归任务:在k个目标上做回归
y
^
=
H
e
a
d
n
o
d
e
h
v
L
=
W
(
H
)
h
v
(
L
)
,
W
(
H
)
∈
R
k
∗
d
将
d
维嵌入映射到
k
维输出
\hat y=Head_{node}h_v^L=W^{(H)}h_v^{(L)},W^{(H)}\in R^{k*d}将d维嵌入映射到k维输出
y^=HeadnodehvL=W(H)hv(L),W(H)∈Rk∗d将d维嵌入映射到k维输出
2.边级别:用节点嵌入对来做预测
y ^ = H e a d e d g e ( h u ( L ) h v ( L ) ) \hat y=Head_{edge}(h_u^{(L)}h_v{(L)}) y^=Headedge(hu(L)hv(L))
目前常见的有两种方式来处理Head:
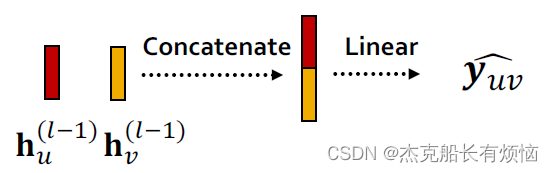
- Concatenation + Linear
y
^
=
l
i
n
e
a
r
(
C
o
n
c
a
t
(
h
u
(
L
)
,
h
V
(
L
)
)
)
\hat y=linear(Concat(h_u^{(L)},h_V^{(L)}))
y^=linear(Concat(hu(L),hV(L)))
- 点积
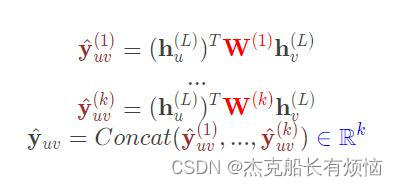
y ^ = ( h u ( L ) ) T h V ( L ) \hat y=(h_u^{(L)})^Th_V^{(L)} y^=(hu(L))ThV(L)
这种方法只能应用于1-way prediction(因为点积输出结果就一维嘛),例如链接预测任务(预测边是否存在)。
在应用在k维上:跟GAT中的多头注意力机制类似,多算机组然后合并(公式中的 W ( 1 ) , … … , W ( k ) W^{(1)},……,W^{(k)} W(1),……,W(k)是可学习的参数)
3.图级别:用图中所有节点的嵌入向量来做预测
y ^ = H e a d g r a p h ( h v ( L ) ∈ R d , ∀ v ∈ G ) H e a d g r a p h ( . ) 与单层的 G N N 中的 A G G ( . ) 类似,都是将托干个嵌入聚合为一个嵌入 \hat y=Head_{graph}(h_v^{(L)}\in \mathbb{R}^d,\forall_v \in G)\\ Head_{graph}(.)与单层的GNN中的AGG(.)类似,都是将托干个嵌入聚合为一个嵌入 y^=Headgraph(hv(L)∈Rd,∀v∈G)Headgraph(.)与单层的GNN中的AGG(.)类似,都是将托干个嵌入聚合为一个嵌入
- 这里的head函数和aggregation操作很像,也是有mean、max、sum操作。如果想比较不同大小的图,mean方法可能比较好(因为结果不受节点数量的影响);如果关心图的大小等信息,sum方法可能比较好。这些方法都在小图上表现很好。但是在大图上的global pooling方法可能会面临丢失信息的问题。
举例:
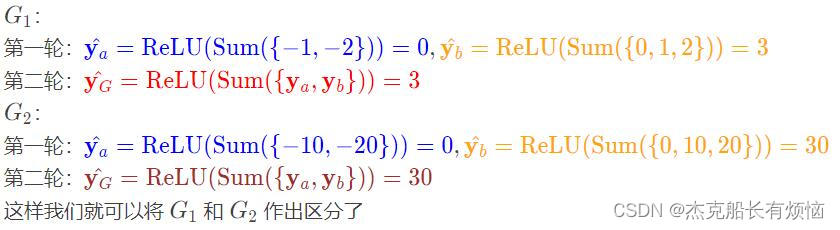
我们首先采用一维的节点向量 G 1 : ( − 1 , − 2 , 0 , 1 , 2 ) 、 G 2 : ( − 10 , − 20 , 0 , 10 , 20 ) G_1:(-1,-2,0,1,2)、G_2:(-10,-20,0,10,20) G1:(−1,−2,0,1,2)、G2:(−10,−20,0,10,20)若是用sum做图预测,上面两个图的结果都是0, 但是明显两个图是不一样的。
-
解决方案:
将上面所有节点的聚合操作变成分层聚合节点嵌入操作,还是上面的例子我们这回使用 R e L U ( S u m ( . ) ) ReLU(Sum(.)) ReLU(Sum(.))作为head函数。然后分别把前面两个节点和后面三个节点分开做聚合,最后合并得出预测结果。
由此可以得到DiffPool算法:
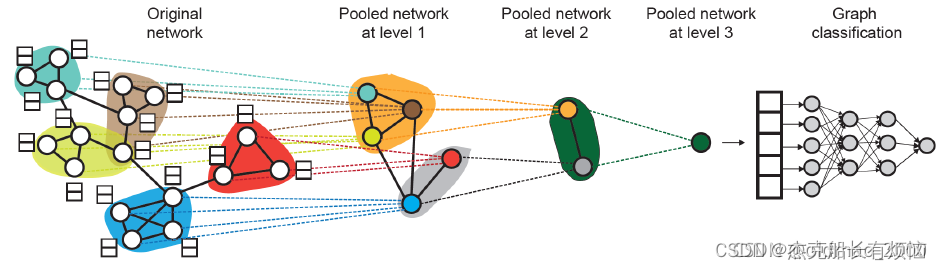
1. 每一层都使用2个独立的GNN
GNN A:计算节点嵌入
GNN B:计算节点所属的集群
A和B在下一层可以并行计算。
2. 对于每个池化层
使用来自 GNN B 的聚类分配来聚合由 GNN A生成的节点嵌入
为每个聚类创建单个新节点,保证聚类之间的边缘以生成新的池化网络
联合训练 GNN A 和 GNN B
5. Predictions & Labels
1.概述
- 有监督学习supervise learning:直接给出标签(如一个分子图是药的概率)
- 无监督学习unsupervised learning / self-supervised learning:使用图自身的信号(如链接预测:预测两节点间是否有边)
- 有时这两种情况下的分别比较模糊,在无监督学习任务中也可能有“有监督任务”,如训练GNN以预测节点clustering coefficient
2. 具体应用情形
| 无监督 | 监督 | |
|---|---|---|
| 节点标签 | 节点统计:如聚类系数、PageRank等 | 在引文网络中,节点属于哪个主题区域 |
| 边标签 | 链接预测:隐藏两个节点之间的边缘,预测是否应该有链接 | 在交易网络中,边缘是否具有欺诈性 |
| 图标签 | 图形统计:例如,预测两个图形是否同构 | 在分子图中,图谱的药物相似性 |
6. Loss Function
1.前置知识
我们用 y ^ ( i ) , y ( i ) \hat y^{(i)},y^{(i)} y^(i),y(i)来统一指代各级别的预测值和标签( i i i是观测编号)
- 分类任务的标签 y ( i ) y^{(i)} y(i)是离散数值,如节点分类任务的标签是节点属于哪一类。
- 回归任务的标签 y ( i ) y^{(i)} y(i)是连续数值,如预测分子图是药的概率。
- 两种任务都能用GNN,其主要区别在于损失函数和评价指标
2. 分类任务的损失函数交叉熵
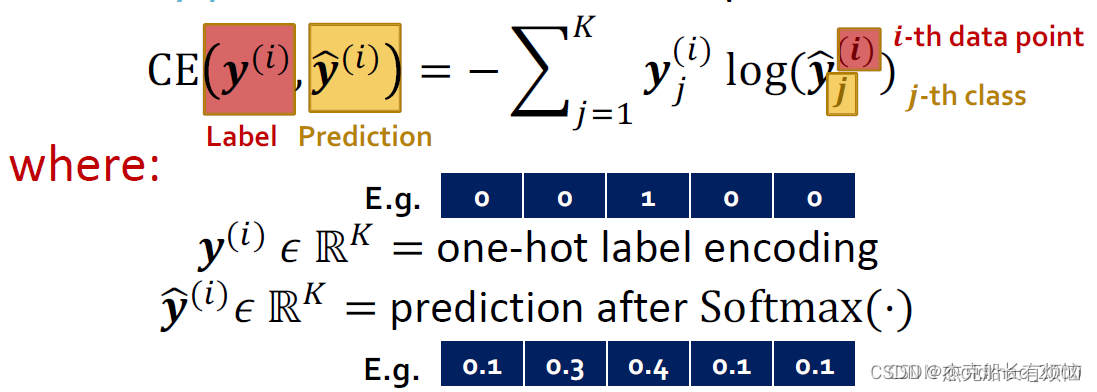
对于N个样本点,总的loss为: L o s s = ∑ i = 1 N C E ( y ( i ) , y ^ ( i ) ) Loss=\sum_{i=1}^NCE(y^{(i)},\hat y^{(i)}) Loss=∑i=1NCE(y(i),y^(i))
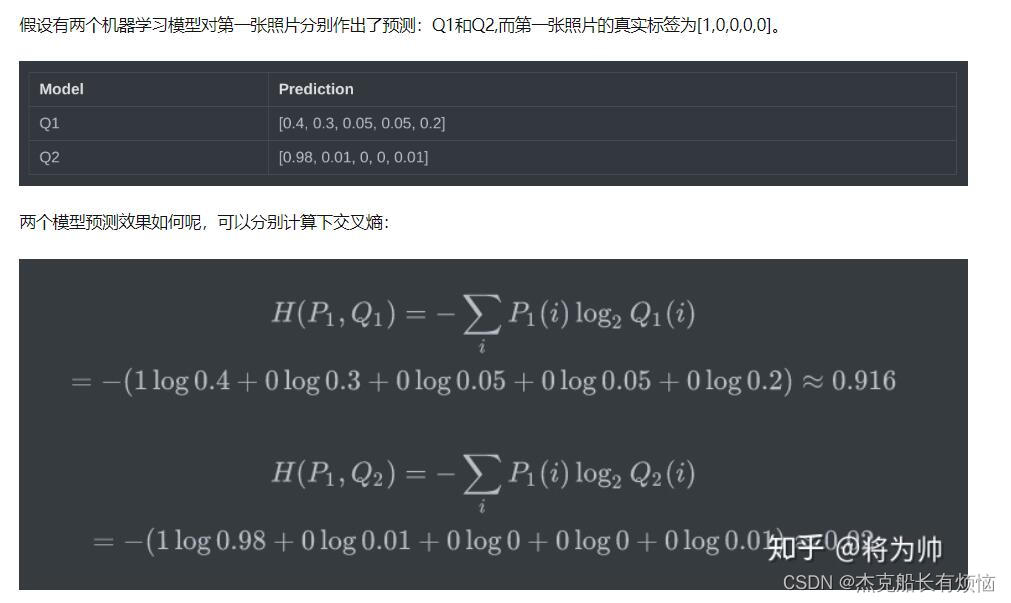
具体计算参考:
3.回归任务的损失函数MSE / L2 loss
MSE的优点:连续、易于微分……等
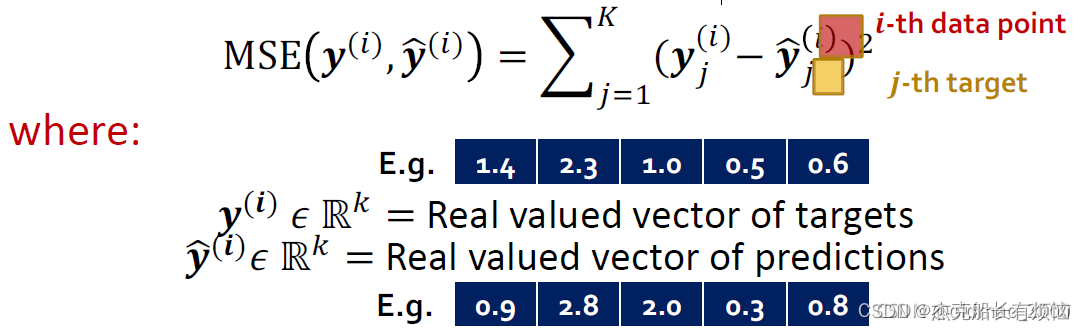
对于N个样本点,总的loss为: L o s s = ∑ i = 1 N M S E ( y ( i ) , y ^ ( i ) ) Loss=\sum_{i=1}^N MSE(y^{(i)},\hat y^{(i)}) Loss=∑i=1NMSE(y(i),y^(i))
7.评估指标Evaluation Metrics
1. 回归任务
- root mean square error (RMSE): ∑ i = 1 N ( y ( i ) − y ^ ( i ) ) 2 N \sqrt{\sum_{i=1}^N\frac{(y^{(i)}-\hat y{(i)})^2}{N}} ∑i=1NN(y(i)−y^(i))2
- mean absolute error (MAE): ∑ i = 1 N ∣ y ( i ) − y ^ ( i ) ∣ N \sum_{i=1}^N\frac{|y^{(i)}-\hat y{(i)}|}{N} ∑i=1NN∣y(i)−y^(i)∣
2.分类任务
-
多分类任务:
accuracy: 1 N [ y ( i ) = a r g m a x ( y ^ ( i ) ) ] \frac {1}{N}[y^{(i)}=argmax(\hat y{(i)})] N1[y(i)=argmax(y^(i))](其中argmax我个人理解的就是找到那个概率最大值对应的索引,看和实际的索引对比,因为实际的值是用one hot向量做的)
-
二分类任务【1】
1.对分类阈值敏感的评估指标:
1.accuracy(准确率):如果输出的范围为[0,1],我们用0.5作为阈值,
2.precision(精确率)/recall(召回率):因为数据不平衡时可能会出现accuracy虚高的情况。比如99%的样本都是负样本,那么分类 器只要预测所有样本为负就可以获得99%的accuracy,但这没有意义。所以需要其他评估指标来解决这一问题。
2.对分类阈值不敏感的评估指标:ROC AUC(因为这个值本身就是取的是曲线上的一个面积)
【1】二元分类的评估指标:
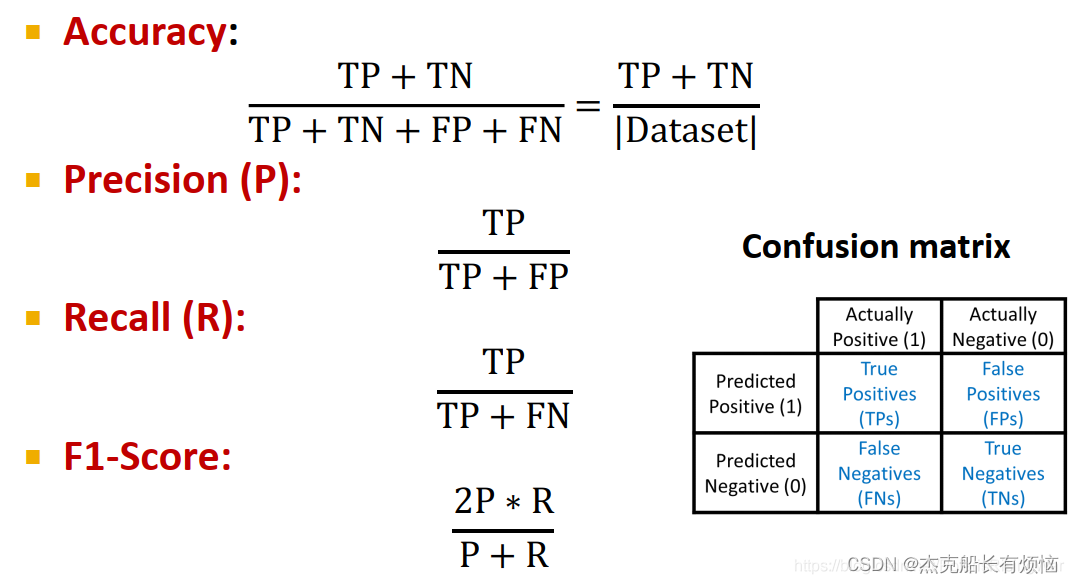
accuracy(分类正确的观测占所有观测的比例)
precision(预测为正的样本中真的为正(预测正确)的样本所占比例)
recall(真的为正的样本中预测为正(预测正确)的样本所占比例)
F1-Score(precision和recall的调和平均值,信息抽取、文本挖掘等领域常用)混淆矩阵:
ROC曲线的图示:
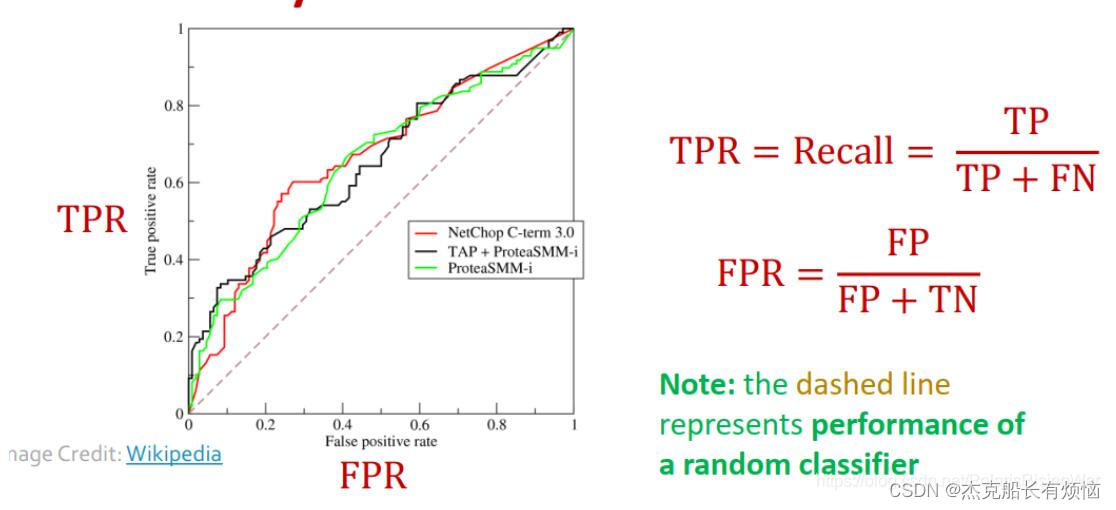
AUC,(Area Under Curve),被定义为ROC曲线下的面积,显然这个面积小于1,又因为ROC曲线一般都处于y=x这条直线的上方,所以AUC一般在0.5到1之间。使用AUC值作为评价标准是因为很多时候ROC曲线并不能清晰的说明哪个分类器的效果更好,而作为一个数值,对应AUC更大的分类器效果更好。
AUC的含义为,当随机挑选一个正样本和一个负样本,根据当前的分类器计算得到的score将这个正样本排在负样本前面的概率。
从AUC判断分类器(预测模型)优劣的标准:
- AUC = 1,是完美分类器,采用这个预测模型时,存在至少一个阈值能得出完美预测。绝大多数预测的场合,不存在完美分类器。
- 0.5 < AUC < 1,优于随机猜测。这个分类器(模型)妥善设定阈值的话,能有预测价值。
- AUC = 0.5,跟随机猜测一样(例:丢铜板),模型没有预测价值。
- AUC < 0.5,比随机猜测还差;但只要总是反预测而行,就优于随机猜测。
8.拆分数据集-1(方法原理)
主要是数据集的划分,这里的知识点和之前的传统数据集划分有点不一样
1.切分数据集
将数据集切分为训练集、验证集、测试集

2. 固定/随机划分
-
固定拆分:我们将拆分数据集一次
§ 训练集:用于优化 GNN 参数(权重)
§ 验证集:开发模型/超参数(比如学习率或者是公式中的超参)
§ 测试集:验证最后模型的性能 -
随机拆分:我们将数据集随机拆分为训练/验证/测试
§ 我们报告不同随机种子的平均性能 -
问题:对于传统数据集,由于每个样本之间是相互独立的,但是图数据中节点和节点之间是有边相连的,不是相互独立的,因此划分数据集有两种设置。
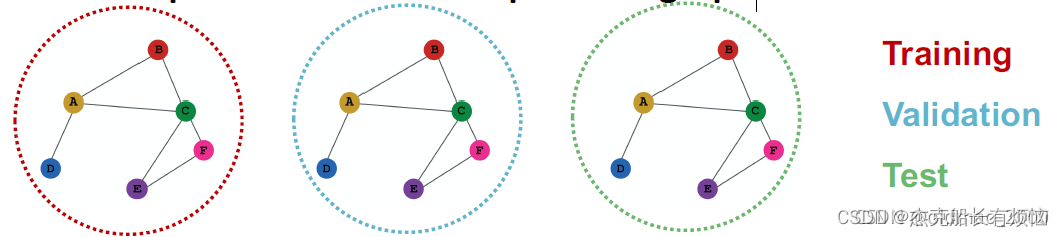
3. 解决方案:Transductive/Inductive
| Transductive(直推) | Inductive (归纳) | |
|---|---|---|
| 训练集 | 我们使用整个图计算嵌入,并使用节点1和2的标签进行训练 | 我们使用节点 1和2 上的图形计算嵌入,并使用节点 1和2 的标签进行训练 |
| 验证集 | 我们使用整个图计算嵌入,并在节点3和4的标签上进行评估 | 在验证时,我们使用节点3和4上的图形计算嵌入,并在节点3和4的标签上进行评估 |
| 原理 | 我们将数据集拆分为(训练集、验证集、测试集)保证每个拆分后的数据集都能够观察到全图 | 我们打破分割之间的边缘以获得多个图形 |
| 图形 | 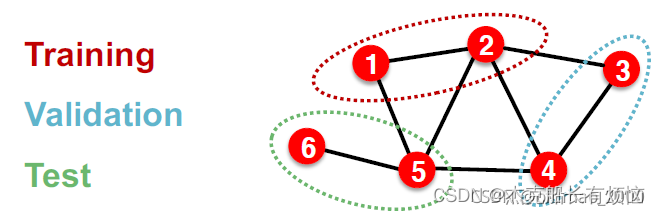 | 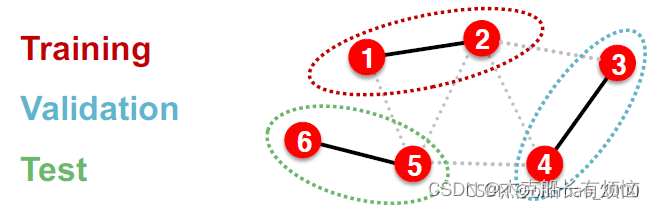 |
| 应用 | 点\边 | 点\边\图 |
| 小结 | ①测试集、验证集、训练集在同一个图上,整个数据集由一张图构成 。 ②全图在所有split中可见。 ③仅适用于节点/边预测任务。 | ①测试集、验证集、训练集分别在不同图上,整个数据集由多个图构成。 ②每个split只能看到split内的图。成功的模型应该可以泛化到没见过的图上。 ③适用于节点/边/图预测任务。 |
4. 示例
- 节点分类任务
transductive:各split可见全图结构,但只能观察到所属节点的标签
inductive:切分多个图,如果没有多个图就将一个图切分成3部分、并去除各部分之间连接的边
-
图预测任务
注意,inductive setting 才能做图分类任务,因为我们的测试集没有看见全图的信息,

上面看上去一样,但是其实每个数据集给的标签不一样
-
边预测任务
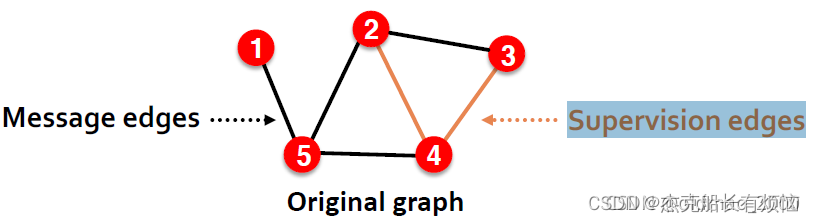
这是个 unsupervised / self-supervised 任务,需要自行建立标签、自主切分数据集。需要隐藏一些边,然后让GNN预测边是否存在。
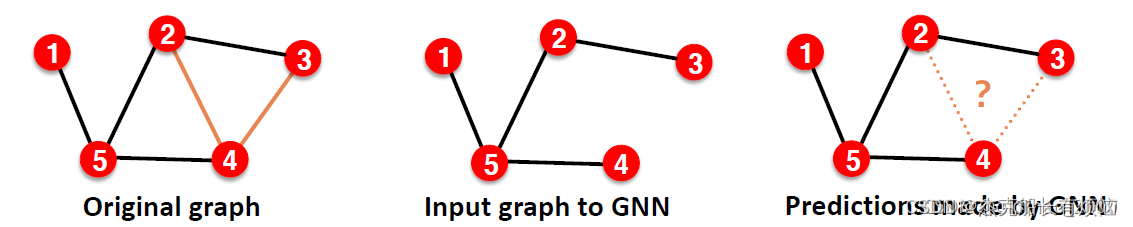
这里把保留的边叫:Message edges,去掉的边叫:Supervision edges
9.拆分数据集-2(具体实施)
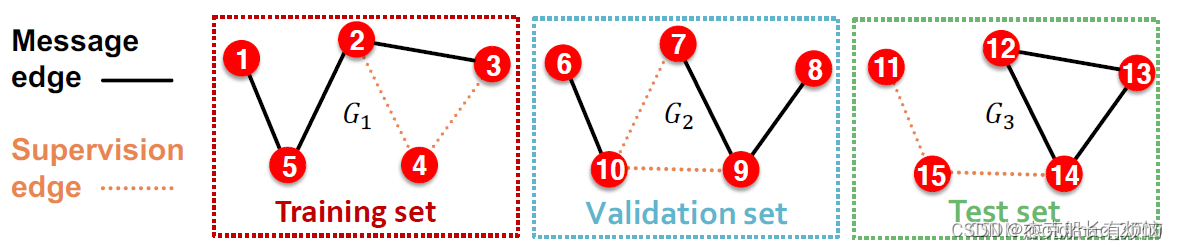
1. inductive link prediction split
划分出3个不同的图组成的划分,每个划分集里的边按照第一步分成message edges和supervision edges
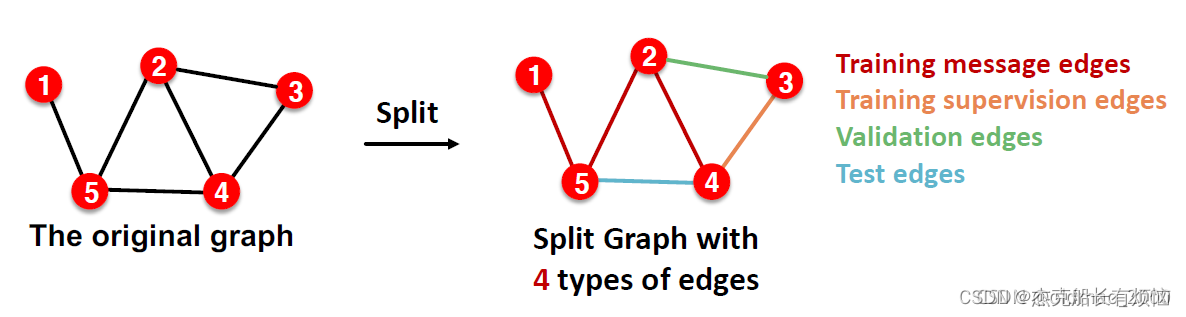
2. Transductive link prediction split
在一张图中进行切分:在训练时要留出验证集/测试集的边,而且注意边既是图结构又是标签,所以还要留出supervision edges
1. 假设我们有一个图的数据集
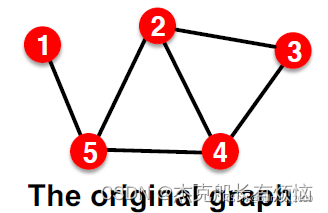
- 训练:用 training message edges 预测 training supervision edges
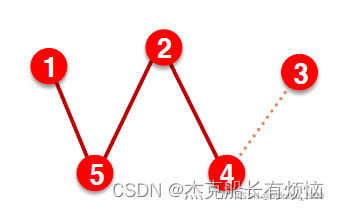
- 验证:用 training message edges 和 training supervision edges 预测 validation edges
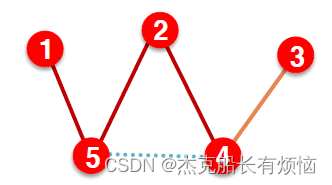
- 测试:用 training message edges 和 training supervision edges 和 validation edges 预测 test edges
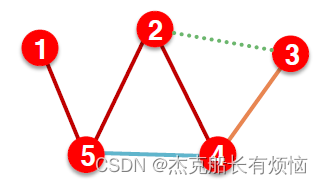
- 链接越来越多,图变得越来越稠密的过程。这是因为在训练过程之后,supervision edges就被GNN获知了,所以在验证时就要应用 supervision edges 来进行 message passing(测试过程逻辑类似)具体来说
| 阶段 | 使用的边 | 预测的边 |
|---|---|---|
| 训练 | Training message edges | Training supervision edges |
| 验证 | Training message edges + Training supervision edges | Validation edges |
| 测试 | Training message edges + Training supervision edges + Validation edges | Test edges |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









