







论文阅读记录
感谢开源工作者!
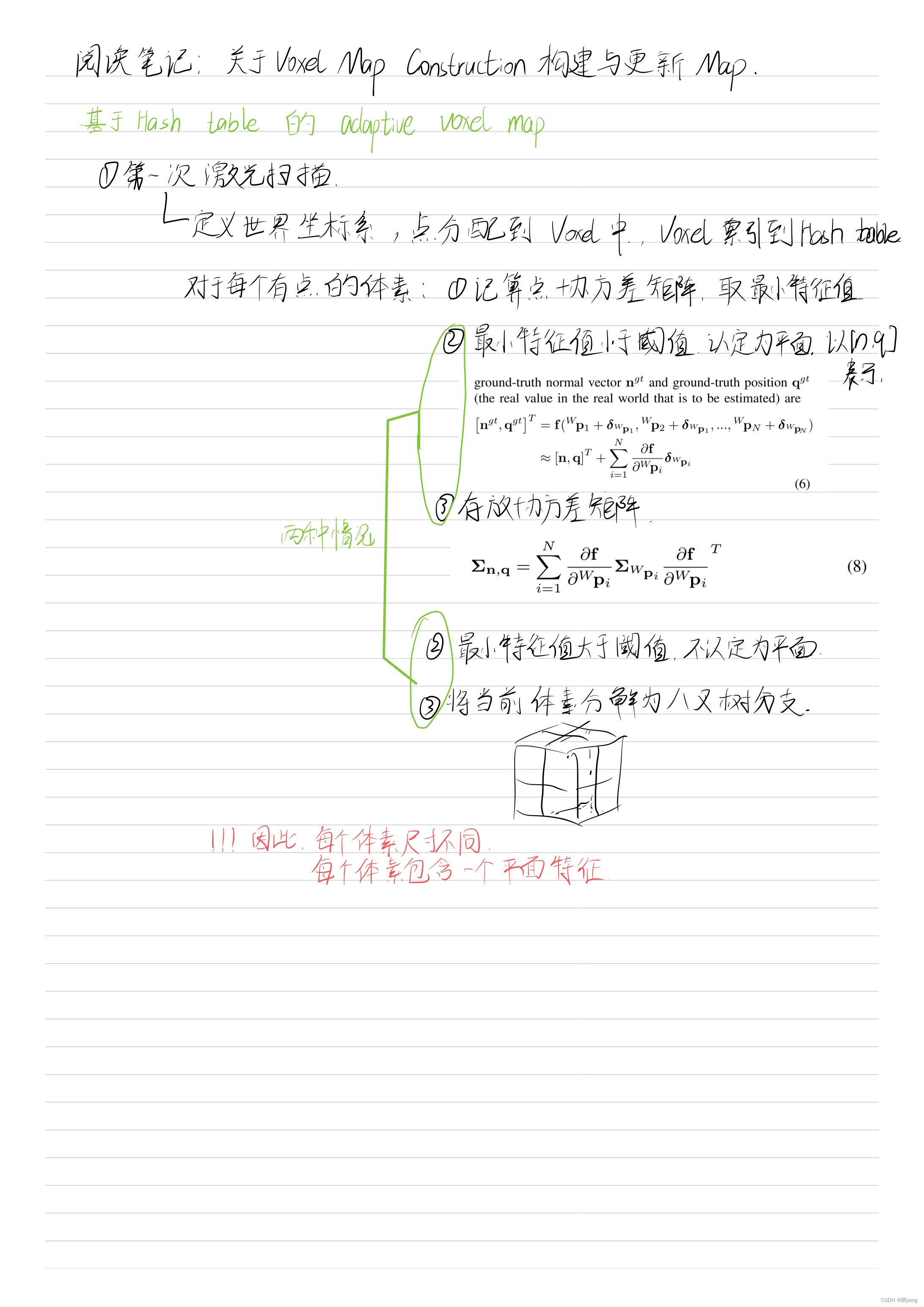
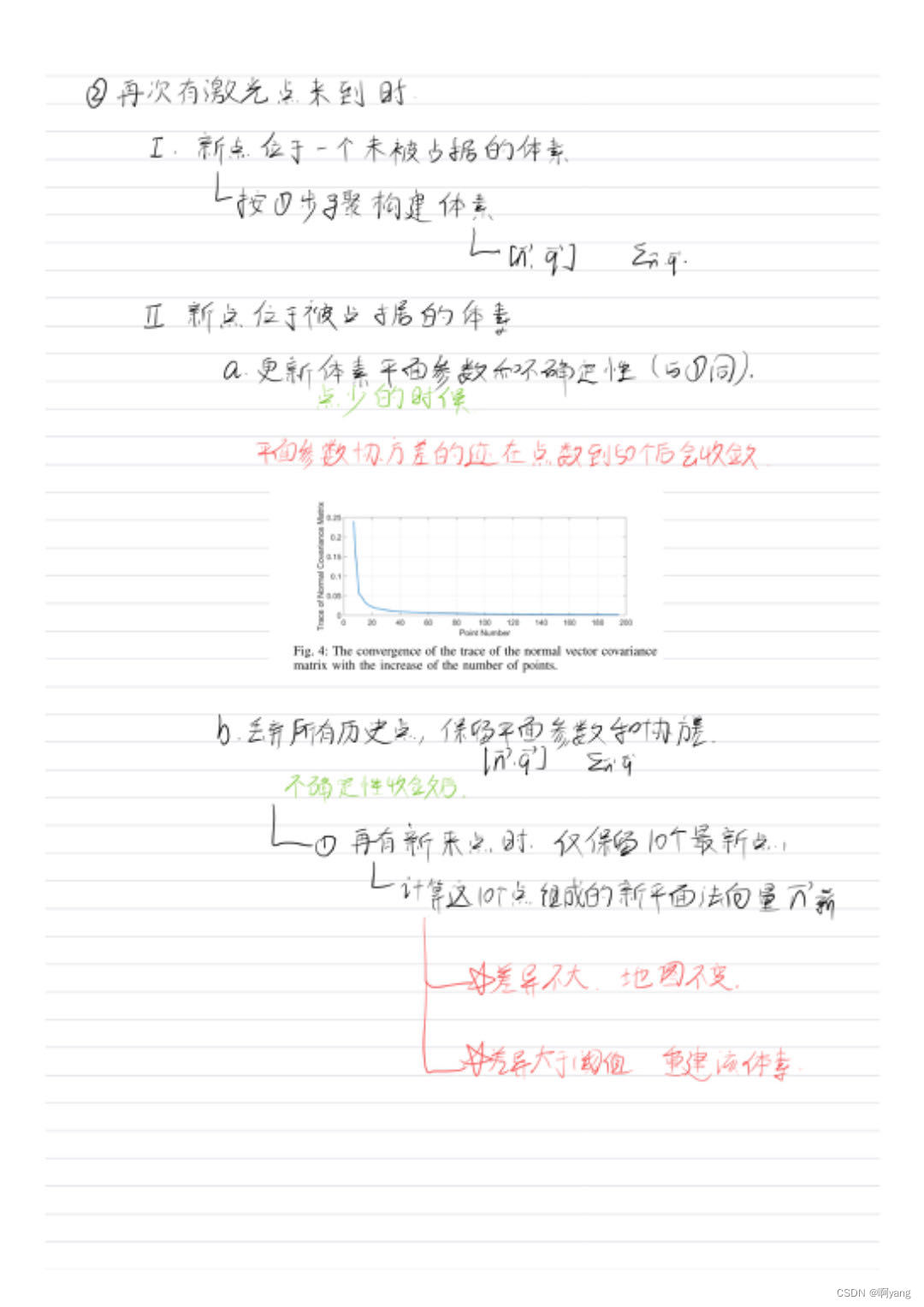
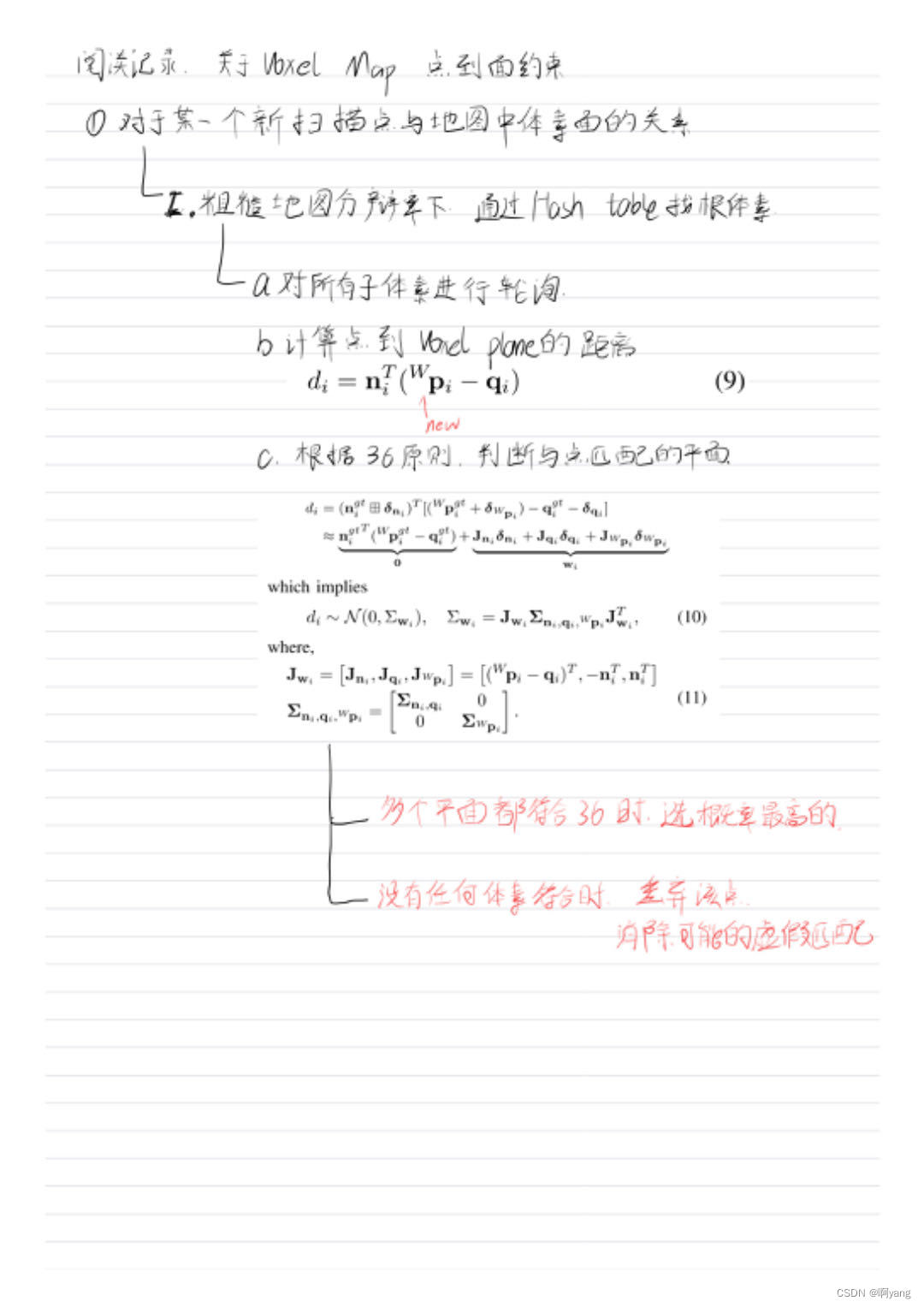
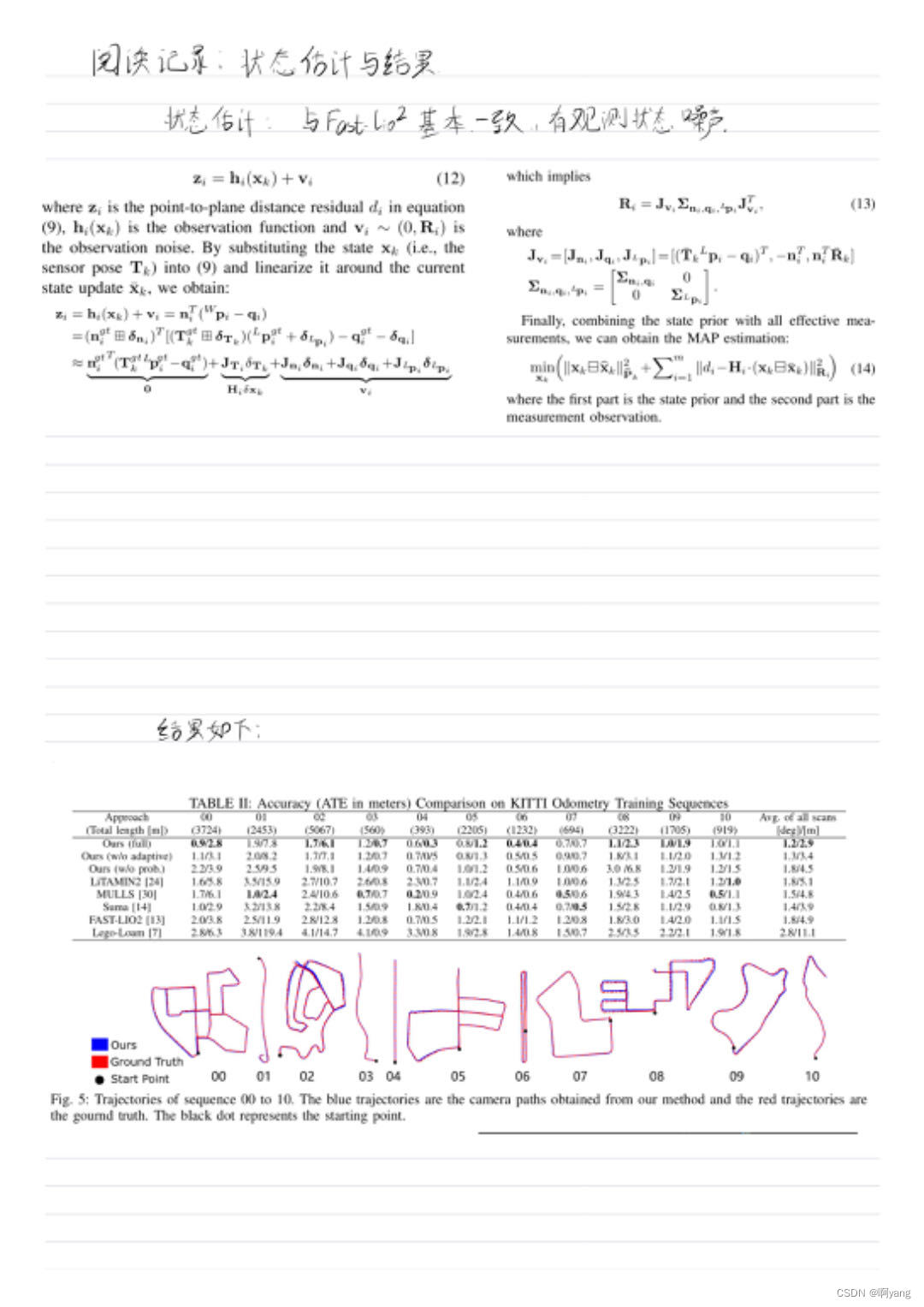
论文名称:Efficient and Probabilistic Adaptive Voxel Mapping for Accurate Online LiDAR Odometry
github地址:https://github.com/hku-mars/VoxelMap
论文阅读记录
论文阅读主要记录了文章的创新内容或者流程性内容:
代码调试记录
我的电脑环境是Ubuntu20.04,代码编译起来没问题,但是运行的时候线程会die,把CXX标准修改为17就可以正常运行了。
修改前CMakeList文件:
ADD_COMPILE_OPTIONS(-std=c++14 )
set( CMAKE_CXX_FLAGS "-std=c++14 -O3" )
add_definitions(-DROOT_DIR=\"${CMAKE_CURRENT_SOURCE_DIR}/\")
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -fexceptions" )
set(CMAKE_CXX_STANDARD 14)
修改后CMakeList文件:
ADD_COMPILE_OPTIONS(-std=c++17 )
set( CMAKE_CXX_FLAGS "-std=c++17 -O3" )
add_definitions(-DROOT_DIR=\"${CMAKE_CURRENT_SOURCE_DIR}/\")
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -fexceptions" )
set(CMAKE_CXX_STANDARD 17)















 428
428











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









