







目录
一、VoxelMap
VoxelMap是一种紧耦合融合的LIO里程计,本文档旨在介绍其核心创新点地图维护部分以及公式推导部分;
二、整体方案
激光惯性里程计通常将历史点云信息按照KD-Tree进行维护,前面两节也介绍了KD-Tree和体素图的计算方式,KD-Tree可以实现O(logn)级别的KNN搜索。在搜索到足够的最近点之后,进行平面/线拟合,然后计算点面残差,这其中平面拟合相对还是比较耗时,并且KD-tree的KNN搜索也比较耗时。Voxel map地图更新方案如下图所示
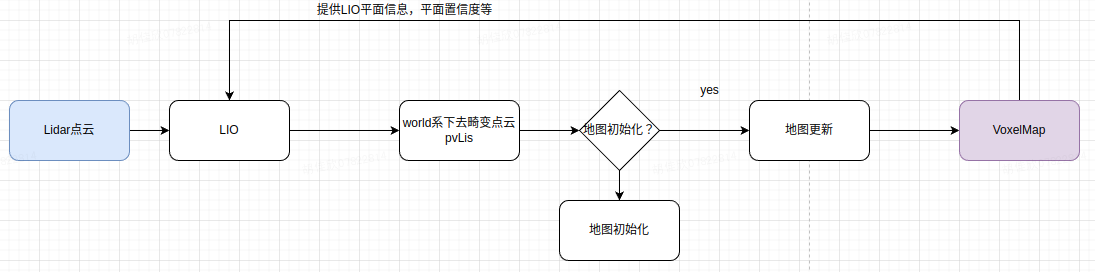
VoxelMap维护体素地图,每个体素地图内部维护八叉树,深度一般为3,根据实际情况自行调整,八叉树节点为平面信息。具体为:
- 体素图的key是世界坐标系下的体素ID,value是体素内信息,用八叉树进行表示;八叉树内存着点云的参数化表示,我们这里主要是平面信息,平面包含质心位置q以及法向量n 共6个参数(注:可以优化使用最近点表示,只有3dof,可以降低地图存储),这就意味着根据位置检索到体素图就可以获取到参数化的平面信息。
- 此外,当体素无法成功拟合平面,需要进行八叉树分割,将大体素分成很多小的体素,这里限制最大深度为3,当然,如果可以拟合平面,就不需要进行分割了。(注:这里也有优化空间,假设体素是3m*3m,那么不同大体素可能维护相同平面,其实可以对多个大体素进行合并,进一步减小地图存储空间,同时可以提高大场景平面精度)
- 论文中的地图方案相对于KD-tree的方案计算耗时更低,整体耗时可以降低30%,CPU占用和内存占用也会大幅下降(30%和50%)
个人认为VoxelMap核心内容分为两部分,一部分是如何维护自适应体素地图,一部分是其理论推导,尤其是平面法向量置信度推导,本文对这两部分进行详细介绍。
三、地图维护方案
VoxelMap维护的可以理解为一个全局地图,如果不进行地图删减,那么地图当中是包含全局信息的。
1.地图初始化
在地图初次建立时进行调用,涉及体素地图和八叉树地图的初始化。
a) 体素图初始化
其中VoxelLoc是点云投影在体素中的键值,OctoTree指的是当前体素“键”对应的“值”。
算法1-1 体素地图初始化
输入:世界坐标系下的去畸变点云pvList,其他初始化参数
输出:面体素地图PlaneVoxelMap
for all pv 属于 pvList do{
VoxelLoc = round(pv/maxVoxelSize)
if(pv是面特征){
if(VoxelLoc属于PlaneVoxelMap.key)
将点缓存在对应的OctoTree的根节点TempPoint中
else
创建新的Octotree并载入参数
}else{
Error:输入异常特征
}
}
for( all PlaneOctoTree属于PlaneVoxelMap.values){
调用1.2进行八叉树PlaneOctoTree初始化
}
b) 八叉树初始化
算法1-2 八叉树初始化
输入:八叉树点云类型(面or线,此处只有面),PlaneVoxelMap.values点云
输出:八叉树根节点
if(点数 > maxPlaneUpdateThreshold){
调用算法4-1进行平面拟合
if(成功拟合平面){
达到树底,不调用1-3所示的节点分割
if(点数 > maxPointsSize){
updateEnable = False,这个体素不再更新平面
释放TempPoint的缓存点云
}
}else{
调用算法1-3进行OctoTree分割
直到成功生成平面or达到maxLayer
}
}
return RootNode;
c) 八叉树分割算法
当父节点调用算法4-1(或者4-2)拟合平面(线)失败,且父节点尚未到达底层时,需要进行父节点分割。节点分割会将父体素分割成8个子体素,子体素的信息会保存在八叉树的叶子节点LeafNodeArr中,当叶子节点也拟合失败,会递归调用知道到大最大深度。
算法1-3 八叉树分割
输入:根节点RootNode
输出:子节点数组LeafNodeArr[8]
获得RootNode中的点云数据纪委pvList
if(到达底层){
不再进行节点分割
return nullptr;
}else{
for(auto& pv: pvList){
根据体素中心center以及pv,判断八叉树节点索引i
载入pv至LeafNodeArr[i]
}
}
for(auto& LeafNode:LeafNodeArr){
if(点数 > maxPlaneUpdateThreshold){
调用4-1进行平面拟合;
if(拟合成功)
continue;
else
递归调用1-3,对LeafNode再次进行OctoTree分割
}
}
return LeafNodeArr[8];
2. 地图更新
地图创建成功之后,需要使用新的激光scan对地图点进行更新,使其能表示新区域的信息。
a) 体素地图更新
将点云放到对应的体素,然后调用2-2更新八叉树,所有点都更新之后,就完成了体素地图的更新。
算法2-1 体素图更新
输入:世界坐标系下的去畸变点云pvList,其他初始化参数
输出:面体素地图PlaneVoxelMap
for all pv 属于 pvList do{
VoxelLoc = round(pv/maxVoxelSize)
if(VoxelLoc属于PlaneVoxelMap.key)
调用2-2进行OctoTree更新
else
创建Octotree并载入参数
}
return PlaneVoxelMap;
b)八叉树更新
算法2-2 八叉树更新
输入:单个扫描点pv, 八叉树根节点RootNode
输出:八叉树根节点
pv载入RootNode的tempPoint
if(进行RootNode尚未初始化){
if(点数 > maxPlaneUpdateThreshold){
调用算法1-2进行RootNode初始化
}
}else{
if(当前节点已成功拟合平面){
if(可以进行平面更新){
if(newPointSize > updateSizeThreshold){
调用算法4-1或者4-2重新拟合平面or直线
newPointSize = 0
}
if(totalPointSize > maPointsSize){
不再拟合并释放资源tempPoint
}
}
}else{
根据体素中心center以及pv,判断八叉树节点索引i
递归调用2-2,进行LeafNode的更新直到最底层
}
}
return RootNode;
3.点云配准及残差计算
根据Hash找到当前点云对应体素,如果体素拟合平面成功,返回点到平面距离等观测量和计算的不确定度;如果当前大体素没有拟合平面成功,则需要进入到八叉树每个叶子节点计算一遍残差,最终选择残差最小的返回,如果都没有找到平面,那就在相邻体素中计算。
a) 点云配准
算法3-1 点云配准
输入:世界坐标系下去畸变点云pvList
输出:观测量MatchingList(残差,不确定度)
for(auto& pv: pvList){
VoxelMap = PlaneVoxelMap
VoxelLoc = round(pv/maxVoxelSize);
if(VoxelLoc 属于VoxelMap.key){
调用算法3-2进行单个观测量MatchingValue计算
if(MatchingValue计算失败)
使用最近邻体素,调用算法3-2进行观测量MatchingValue计算
else
将MatchingValue并入MatchingList尾部
}
}
return MatchingList;
b) 单个观测量计算
算法3-2 单个观测量MatchingValue计算
输入:点云在世界坐标系位置pv, 八叉树根节点RootNode
输出:观测量MatchingList(残差,不确定度)
将pv向量化,获取本节点法向量n和质心q
pq = pv -q;
if(当前节点已成功拟合平面){
计算点到平面的距离d = n*qp
缓存法向量、质心、距离至MatchingValue
}else{
进入“所有”LeafNode递归调用算法3-2进行观测量计算
选择LeafNode中距离d最小的MatchingValue返回
}
return MatchingValue;
4、平面的拟合
前面已经介绍过标准的平面拟合,这里是VoxelMap用的平面拟合方法
算法4-1 平面拟合
输入:点云pointsVec
输出:平面参数
计算质心q
计算点云pointsVec协方差Cov
对Cov进行特征分解L_min, L_middle, L_max,三个特征向量对应点云的正交分解
选取最小特征值对应特征向量作为法向量n
if(L_min < planeThreshold){
plane = [n q]
}else{
平面拟合失败
}
return plane;
四、理论推导
1、Local系下点云 L p i ^Lp_i Lpi位置协方差
激光雷达通过扫描电机的编码器测量方向 w w w,通过计算激光飞行时间来测量深度 d d d 。这两部分相互独立,最后相乘得到点云在惯性系下的坐标 L p i = d i ∗ w i ^Lp_i = d_i * w_i Lpi=di∗wi。因此可以对这他们分开建立误差模型。
-
测距距离建模相对比较简单。假设 d i d_i di是深度测量值并且深度误差 δ d i ∼ N ( 0 , ∑ d i ) \delta_{d_i}\sim N(0, {\textstyle \sum_{d_i}} ) δdi∼N(0,∑di),那么测距真值可通过简单线性相加得到 d i g t = d i + δ d i d_i^{gt}=d_i +\delta_{d_i} digt=di+δdi。
-
测量方向建模涉及S2流形。假设 w i w_i wi是方向测量值并且为 δ w i ∼ N ( 0 , ∑ w i ) \delta_{w_i} \sim N(0,{\textstyle \sum_{w_i}}) δwi∼N(0,∑wi)测量量 w i w_i wi在切平面下的方向误差,那么方向真值可以通过SO2上的加法实现,其中 N ( w i ) 3 ∗ 2 N(w_i)_{3*2} N(wi)3∗2为 w i w_i wi切平面下的标准正交基。
-

-

结合方向和距离测量,可以对Local系下的3D点云的误差进行建模,如下:

据此,可以得到 3D 点云的误差建模模型 δ L p i ∼ N ( 0 , ∑ L p i ) \delta_{^Lp_i} \sim N(0,{\textstyle \sum_{^Lp_i}}) δLpi∼N(0,∑Lpi),为深度误差和方向误差线性变换之后的高斯分布。

对应代码实现如下:注意,这里方向向量的选择,是选择了N1,然后N1.cross(w)得到N2,此外,这部分协方差随着距离的增加而增加,因此越远的点置信度越低
void calcBodyCov(Eigen::Vector3d &pb, const float range_inc,
const float degree_inc, Eigen::Matrix3d &cov) {
float range = sqrt(pb[0] * pb[0] + pb[1] * pb[1] + pb[2] * pb[2]);
float range_var = range_inc * range_inc;
Eigen::Matrix2d direction_var;
direction_var << pow(sin(DEG2RAD(degree_inc)), 2), 0, 0,
pow(sin(DEG2RAD(degree_inc)), 2);
Eigen::Vector3d direction(pb);
direction.normalize();
Eigen::Matrix3d direction_hat;
direction_hat << 0, -direction(2), direction(1), direction(2), 0,
-direction(0), -direction(1), direction(0), 0;
Eigen::Vector3d base_vector1(1, 1,
-(direction(0) + direction(1)) / direction(2));
base_vector1.normalize();
Eigen::Vector3d base_vector2 = base_vector1.cross(direction);
base_vector2.normalize();
Eigen::Matrix<double, 3, 2> N;
N << base_vector1(0), base_vector2(0), base_vector1(1), base_vector2(1),
base_vector1(2), base_vector2(2);
Eigen::Matrix<double, 3, 2> A = range * direction_hat * N;
cov = direction * range_var * direction.transpose() +
A * direction_var * A.transpose();
};
2、世界系下点云 W p i ^Wp_i Wpi位置协方差
这部分比较简单,转换过程
W
p
i
=
L
W
R
i
∗
L
p
i
+
L
W
t
i
^Wp_i = ^W_LR_i*^Lp_i + ^W_Lt_i
Wpi=LWRi∗Lpi+LWti,这里转换时需要考虑位姿
L
W
T
i
^W_LT_i
LWTi的不确定度,计算过程如下:

因此,世界系下点云的误差
δ
w
p
i
∼
N
(
0
,
∑
w
p
i
)
\delta_{^wp_i} \sim N(0,{\textstyle \sum_{^wp_i}})
δwpi∼N(0,∑wpi)为:

这个不确定度已经和滤波器状态相关了,因此是系统状态不确定度+Lidar测量的总不确定度,因此会比局部坐标系下点的误差更大一些。
3、VoxelMap中拟合平面 [ W n , W q ] [^Wn,^Wq] [Wn,Wq]的协方差
这部分是重点,地图中保存世界系下的平面,通常表示为法向量
n
p
n_p
np和质心
W
q
p
^Wq_p
Wqp,也会保存并更新平面协方差,平面协方差就是估计的n和q的协方差。前面可以看到n和q的计算过程,是对点云最新范围的一簇历史点进行特征分解得到,假设拟合平面使用N个点,
W
p
1
,
W
p
2
,
.
.
.
.
,
W
p
N
^Wp_1,^Wp_2,....,^Wp_N
Wp1,Wp2,....,WpN, 平面的法向量
n
q
n_q
nq为点云协方差矩阵最小特征值
λ
m
\lambda_m
λm对应的特征向量
u
m
\textbf{u}_m
um.
显然[n,q]能表示为点云的函数

一阶泰勒展开:
[
n
g
t
,
q
g
t
]
T
≈
[
n
,
q
]
T
+
∑
i
=
1
N
∂
f
∂
W
p
i
δ
w
p
i
[n^{gt},q^{gt}]^T\approx [n,q]^T+\sum_{i=1}^{N}\frac{\partial f}{\partial ^Wp_i}\delta _{^wp_i}
[ngt,qgt]T≈[n,q]T+i=1∑N∂Wpi∂fδwpi
最终的协方差为:

下面介绍
∂
f
∂
W
p
i
\frac{\partial f}{\partial ^Wp_i}
∂Wpi∂f怎么求。
-
质心 W q ^Wq Wq的协方差计算:质心是所有点云的平均值

可以得到质心的误差服从 δ q ∼ N ( 0 , ∑ q ) \delta_{q} \sim N(0,{\textstyle \sum_{q}}) δq∼N(0,∑q)
为这些3D点covariance的线性组合:

-
特征向量 u m \textbf{u}_m um的协方差计算:平面的法向量 n q n_q nq为点云协方差矩阵最小特征值 λ m \lambda_m λm对应的特征向量,与点云 W p 1 , W p 2 , . . . . , W p N ^Wp_1,^Wp_2,....,^Wp_N Wp1,Wp2,....,WpN之间的关系比较复杂,我们一步一步来进行推导:
对于点云 W p 1 , W p 2 , . . . . , W p N ^Wp_1,^Wp_2,....,^Wp_N Wp1,Wp2,....,WpN的协方差矩阵A

A有如下特征分解:

由于A为实对称矩阵,因此特征向量
u
1
\textbf{u}_1
u1,
u
2
\textbf{u}_2
u2,
u
3
\textbf{u}_3
u3彼此正交,因此
U
T
U
=
I
U^TU=I
UTU=I成立,
U
T
U
=
I
U^TU=I
UTU=I两边对
W
p
i
^Wp_i
Wpi的三维坐标
(
x
i
,
y
i
,
z
i
)
(x_i, y_i,z_i)
(xi,yi,zi)中任意
v
v
v求偏导,则下式成立:

对于特征分解
Λ
=
U
T
A
U
\Lambda=U^TAU
Λ=UTAU两边也对
v
v
v求偏导,得到:

为了表示成
v
C
^vC
vC的方程,将
U
Λ
=
A
U
U\Lambda=AU
UΛ=AU带入,可得:

带入
v
C
^vC
vC得到:

这里 Λ \Lambda Λ是对角矩阵,因此 ∂ Λ ∂ v \frac{\partial \Lambda }{\partial v} ∂v∂Λ的所有非对角元素为0。 因此上述方程的非对角元素为0。因此下等式恒成立:

其中
v
C
m
,
n
^vC_{m,n}
vCm,n为
v
C
^vC
vC的m行n列元素。对
v
C
m
,
n
^vC_{m,n}
vCm,n合并同类项,并结合
v
C
+
v
C
T
=
0
^vC+^vC^T=0
vC+vCT=0,可得
v
C
^vC
vC中所有元素的解析表达式:

结合
V
C
=
U
T
∂
U
∂
v
^VC=U^{T} \frac{\partial U}{\partial v}
VC=UT∂v∂U,则下式成立:

其中
e
k
e_k
ek代表第k个元素为1其他为0的方向向量。则带入v为
x
,
y
,
z
{x,y,z}
x,y,z的任意值,则:

为了使上式更加简洁,引入行向量

则
∂
u
k
∂
p
j
\frac{\partial \textbf{u}_k}{\partial \textbf{p}_j}
∂pj∂uk为:

对于
F
m
,
n
p
j
\textbf{F}_{m,n}^{p_j}
Fm,npj,可以近似为:

对于
∂
u
m
T
A
u
n
∂
p
j
\frac{\partial \textbf{u}_m^T\textbf{A}\textbf{u}_n}{\partial \textbf{p}_j}
∂pj∂umTAun的求解如下:

最后,代入
∂
u
m
T
A
u
n
∂
p
j
\frac{\partial \textbf{u}_m^T\textbf{A}\textbf{u}_n}{\partial \textbf{p}_j}
∂pj∂umTAun到
F
m
,
n
p
j
\textbf{F}_{m,n}^{p_j}
Fm,npj,可以得到
F
m
,
n
p
j
\textbf{F}_{m,n}^{p_j}
Fm,npj的解析表达式:

这样,我们就可以得到特征向量
u
\textbf{u}
u关于点云
W
p
i
^Wp_i
Wpi的偏导数:

对平面法向量来说,令
u
k
\textbf{u}_k
uk为最小特征值对应的特征向量
u
m
\textbf{u}_m
um即可。最后平面法向量
u
m
\textbf{u}_m
um的协方差如下:

注:这里可以很方便的扩展到直线,直线方向向量为最大特征值对应特征向量,替换
u
k
\textbf{u}_k
uk为最大特征向量即可。
此外,如果新增几个点之后,需要重新拟合平面,这部分可以进行增量计算,因此上述计算也只需要增量计算即可,可以避免一些重复计算。
增量更新一个高斯分布:

均值显而易见,下面简单说下方差推导

中间两项为零,于是

合并后:

对应代码:
// check is plane , calc plane parameters including plane covariance
void init_plane(const std::vector<pointWithCov> &points, Plane *plane) {
plane->plane_cov = Eigen::Matrix<double, 6, 6>::Zero();
plane->covariance = Eigen::Matrix3d::Zero();
plane->center = Eigen::Vector3d::Zero();
plane->normal = Eigen::Vector3d::Zero();
plane->points_size = points.size();
plane->radius = 0;
for (auto pv : points) {
plane->covariance += pv.point * pv.point.transpose();
plane->center += pv.point;
}
plane->center = plane->center / plane->points_size;
plane->covariance = plane->covariance / plane->points_size -
plane->center * plane->center.transpose();
Eigen::EigenSolver<Eigen::Matrix3d> es(plane->covariance);
Eigen::Matrix3cd evecs = es.eigenvectors();
Eigen::Vector3cd evals = es.eigenvalues();
Eigen::Vector3d evalsReal;
evalsReal = evals.real();
Eigen::Matrix3f::Index evalsMin, evalsMax;
evalsReal.rowwise().sum().minCoeff(&evalsMin);
evalsReal.rowwise().sum().maxCoeff(&evalsMax);
int evalsMid = 3 - evalsMin - evalsMax;
Eigen::Vector3d evecMin = evecs.real().col(evalsMin);
Eigen::Vector3d evecMid = evecs.real().col(evalsMid);
Eigen::Vector3d evecMax = evecs.real().col(evalsMax);
// plane covariance calculation
Eigen::Matrix3d J_Q;
J_Q << 1.0 / plane->points_size, 0, 0, 0, 1.0 / plane->points_size, 0, 0, 0,
1.0 / plane->points_size;
if (evalsReal(evalsMin) < planer_threshold_) {
std::vector<int> index(points.size());
std::vector<Eigen::Matrix<double, 6, 6>> temp_matrix(points.size());
for (int i = 0; i < points.size(); i++) {
Eigen::Matrix<double, 6, 3> J;
Eigen::Matrix3d F;
for (int m = 0; m < 3; m++) {
if (m != (int)evalsMin) {
Eigen::Matrix<double, 1, 3> F_m =
(points[i].point - plane->center).transpose() /
((plane->points_size) * (evalsReal[evalsMin] - evalsReal[m])) *
(evecs.real().col(m) * evecs.real().col(evalsMin).transpose() +
evecs.real().col(evalsMin) * evecs.real().col(m).transpose());
F.row(m) = F_m;
} else {
Eigen::Matrix<double, 1, 3> F_m;
F_m << 0, 0, 0;
F.row(m) = F_m;
}
}
J.block<3, 3>(0, 0) = evecs.real() * F;
J.block<3, 3>(3, 0) = J_Q;
plane->plane_cov += J * points[i].cov * J.transpose();
}
}
4、观测更新
a) 平面匹配- 3 σ 3\sigma 3σ校验
给定一个Lidar 3D点
W
p
i
^Wp_i
Wpi(通过位姿先验预测到世界坐标系),我们首先找到其root Voxel(使用coarse地图分辨率,大体素)位于的Hash Kay. 然后所有子体素都有可能是一个有效的匹配,这里假设某个子体素包含平面[n,q],我们可以计算点到平面距离的不确定度,当前scan的点到VoxelMap中获取的平面的距离如下:

对于
f
p
f_p
fp 进行协方差传递:

当系统没有误差时有:

则上式可以简化为:

则点到平面距离d的方差为:

这里需要判断点到平面的距离是否<
3
σ
3\sigma
3σ(注:上式写错了结果是
σ
2
\sigma ^2
σ2),满足这个条件的被认为是有效的匹配,如果大体素里面的多个平面都满足
3
σ
3\sigma
3σ准则,那么就选择概率最高的平面进行匹配。如果没有平面满足该准则,把这个点扔掉。
b) 测量更新
点到平面距离观测方程如下:

测量噪声为:

其中:

T
k
\textbf{T}_k
Tk是状态变量,观测矩阵为
J
T
i
\textbf{J}_{\textbf{T}_i}
JTi. 知道观测矩阵和观测噪声,然后基于IEKF进行更新即可。
五、优化思路
- 这篇论文只考虑了面特征,感兴趣的可以对线特征进行类似的推导,原理并不复杂,可以复用面计算的一些结果
- 目前VoxelMap地图还是存在冗余,如果是一个大的平面,地图中还是会存在多个相同的平面,可以对这些平面进行合并,减小地图尺寸

















 985
985

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









