






编程实现步进电机的正反转控制,正反转时间分别持续 10S,循环执行。
步进电机工作原理
通常步进电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。磁场会带动转子旋转一定的角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转步距角。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可以控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
大致解释一下电机的步进顺序,下图就是单极性步进电机半步的通电顺序,具体看下图:
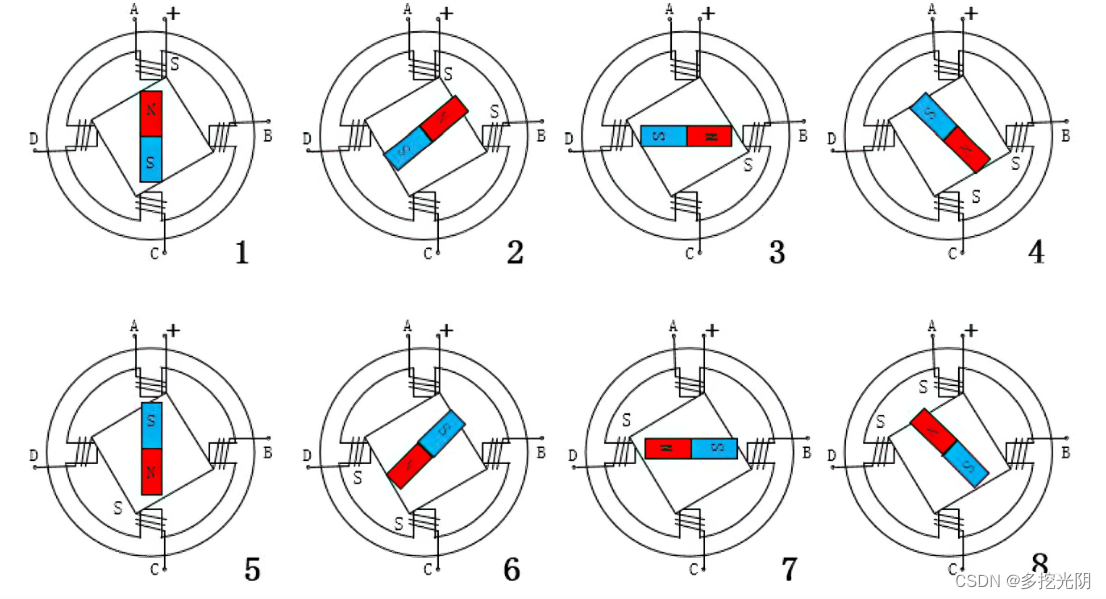
由于电流决定磁场,同性相斥异性相吸,所以转子在电流产生的磁场变化下被相斥相吸而转动,如上图所示;步骤1->8的通电顺序为:A->AB->B->BC->C->CD->D->DA。
1.A 相通电,B、C、D相断电
2.A、B 相通电,且电流相同,产生相同磁性。C、D相断电
3.B 相通电,A、C、D 相断电
4.B、C 相通电,且电流相等,产生相同磁性。A、D 相断电
5.C相通电,A、B、D 相断电
6.C、D 相通电,且电流相同,产生相同磁性。A、B 相断电
7.D 相通电,A、B、C 相断电
8.A、D 相通电,且电流相同,产生相同磁性。B、C相断电
话不多说,上代码
下面展示一些 内联代码片。
main.c
#include "reg52.h"
typedef unsigned int u16; //对系统默认数据类型进行重定义
typedef unsigned char u8;
//定义TC1508S控制步进电机管脚
sbit IN_A=P1^0;
sbit IN_B=P1^1;
sbit IN_C=P1^2;
sbit IN_D=P1^3;
/*******************************************************************************
* 函 数 名 : delay_10us
* 函数功能 : 延时函数,ten_us=1时,大约延时10us
* 输 入 : ten_us
* 输 出 : 无
*******************************************************************************/
void delay_10us(u16 ten_us)
{
while(ten_us--);
}
/*******************************************************************************
* 函 数 名 : delay_ms
* 函数功能 : ms延时函数,ms=1时,大约延时1ms
* 输 入 : ten_us
* 输 出 : 无
*******************************************************************************/
void delay_ms(u16 ms)
{
u16 i,j;
for(i=ms;i>0;i--)
for(j=110;j>0;j--);
}
/*******************************************************************************
* 函 数 名 : step_motor_send_pulse
* 函数功能 : 输出一个数据给TC1508S从而实现向步进电机发送一个脉冲
* 输 入 : step:指定步进序号,可选值0~7
dir:方向选择,1:顺时针,0:逆时针
* 输 出 : 无
*******************************************************************************/
void step_motor_send_pulse(u8 step,u8 dir)
{
u8 temp=step;
if(dir==0) //如果为逆时针旋转
temp=7-step;//调换节拍信号
switch(temp)//8个节拍控制:(A+)->(A+B+)->(B+)->(B+A-)->(A-)->(A-B-)->(B-)>(B-A+)
{
case 0: IN_A=1;IN_B=0;IN_C=0;IN_D=0;break;
case 1: IN_A=1;IN_B=0;IN_C=1;IN_D=0;break;
case 2: IN_A=0;IN_B=0;IN_C=1;IN_D=0;break;
case 3: IN_A=0;IN_B=1;IN_C=1;IN_D=0;break;
case 4: IN_A=0;IN_B=1;IN_C=0;IN_D=0;break;
case 5: IN_A=0;IN_B=1;IN_C=0;IN_D=1;break;
case 6: IN_A=0;IN_B=0;IN_C=0;IN_D=1;break;
case 7: IN_A=1;IN_B=0;IN_C=0;IN_D=1;break;
default: IN_A=0;IN_B=0;IN_C=0;IN_D=0;break;//停止相序
}
}
/*******************************************************************************
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void main()
{
u8 key=0;
u8 dir=1;//默认逆时针方向
u8 speed=20;
u8 step=0;
u8 cishu=0;
while(1)
{
step=0;
cishu=0;
dir=!dir;
for(;cishu<=250;cishu++)
{
step_motor_send_pulse(step++,dir);
if(step==8)step=0;
delay_ms(40);
}
}
}
下面展示一些 内联代码片。
reg52.h
/*--------------------------------------------------------------------------
REG52.H
Header file for generic 80C52 and 80C32 microcontroller.
Copyright (c) 1988-2002 Keil Elektronik GmbH and Keil Software, Inc.
All rights reserved.
--------------------------------------------------------------------------*/
#ifndef __REG52_H__
#define __REG52_H__
/* BYTE Registers */
sfr P0 = 0x80;
sfr P1 = 0x90;
sfr P2 = 0xA0;
sfr P3 = 0xB0;
sfr PSW = 0xD0;
sfr ACC = 0xE0;
sfr B = 0xF0;
sfr SP = 0x81;
sfr DPL = 0x82;
sfr DPH = 0x83;
sfr PCON = 0x87;
sfr TCON = 0x88;
sfr TMOD = 0x89;
sfr TL0 = 0x8A;
sfr TL1 = 0x8B;
sfr TH0 = 0x8C;
sfr TH1 = 0x8D;
sfr IE = 0xA8;
sfr IP = 0xB8;
sfr SCON = 0x98;
sfr SBUF = 0x99;
/* 8052 Extensions */
sfr T2CON = 0xC8;
sfr RCAP2L = 0xCA;
sfr RCAP2H = 0xCB;
sfr TL2 = 0xCC;
sfr TH2 = 0xCD;
/* BIT Registers */
/* PSW */
sbit CY = PSW^7;
sbit AC = PSW^6;
sbit F0 = PSW^5;
sbit RS1 = PSW^4;
sbit RS0 = PSW^3;
sbit OV = PSW^2;
sbit P = PSW^0; //8052 only
/* TCON */
sbit TF1 = TCON^7;
sbit TR1 = TCON^6;
sbit TF0 = TCON^5;
sbit TR0 = TCON^4;
sbit IE1 = TCON^3;
sbit IT1 = TCON^2;
sbit IE0 = TCON^1;
sbit IT0 = TCON^0;
/* IE */
sbit EA = IE^7;
sbit ET2 = IE^5; //8052 only
sbit ES = IE^4;
sbit ET1 = IE^3;
sbit EX1 = IE^2;
sbit ET0 = IE^1;
sbit EX0 = IE^0;
/* IP */
sbit PT2 = IP^5;
sbit PS = IP^4;
sbit PT1 = IP^3;
sbit PX1 = IP^2;
sbit PT0 = IP^1;
sbit PX0 = IP^0;
/* P3 */
sbit RD = P3^7;
sbit WR = P3^6;
sbit T1 = P3^5;
sbit T0 = P3^4;
sbit INT1 = P3^3;
sbit INT0 = P3^2;
sbit TXD = P3^1;
sbit RXD = P3^0;
/* SCON */
sbit SM0 = SCON^7;
sbit SM1 = SCON^6;
sbit SM2 = SCON^5;
sbit REN = SCON^4;
sbit TB8 = SCON^3;
sbit RB8 = SCON^2;
sbit TI = SCON^1;
sbit RI = SCON^0;
/* P1 */
sbit T2EX = P1^1; // 8052 only
sbit T2 = P1^0; // 8052 only
/* T2CON */
sbit TF2 = T2CON^7;
sbit EXF2 = T2CON^6;
sbit RCLK = T2CON^5;
sbit TCLK = T2CON^4;
sbit EXEN2 = T2CON^3;
sbit TR2 = T2CON^2;
sbit C_T2 = T2CON^1;
sbit CP_RL2 = T2CON^0;
#endif
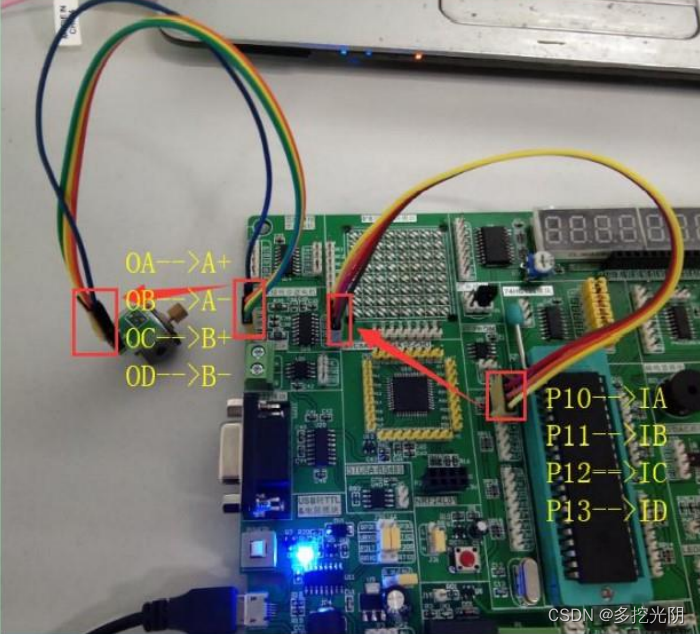
硬件连接















 398
398











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









