







Blob分析:
主要是对图像进行处理,通过想要获取的内容画相对应的ROI区域,进行阈值分割等系列操作等到想要的内容
下列代码都是对下列这张图做操作(这个图来自halcon,可直接调用)
这是Blob分析后得到的结果:
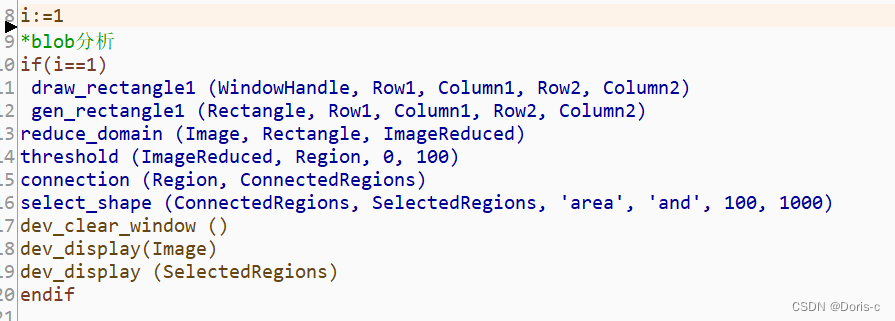
通过绘制矩形来确定要得到内容的ROI区域,进行阈值分析,特征筛选等操作

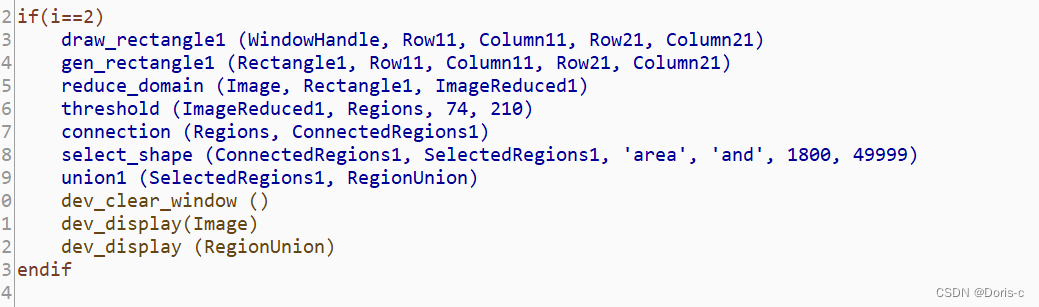
不同ROI及阈值等操作得到不同的区域:

halcon找线:画线不同方向可能有的能得到,有的不能,此时需要调整阈值或寻找方向(由亮到暗等)或者改变画线方向就能得到
Blob分析:
主要是对图像进行处理,通过想要获取的内容画相对应的ROI区域,进行阈值分割等系列操作等到想要的内容
下列代码都是对下列这张图做操作(这个图来自halcon,可直接调用)
这是Blob分析后得到的结果:
通过绘制矩形来确定要得到内容的ROI区域,进行阈值分析,特征筛选等操作
不同ROI及阈值等操作得到不同的区域:
halcon找线:画线不同方向可能有的能得到,有的不能,此时需要调整阈值或寻找方向(由亮到暗等)或者改变画线方向就能得到
 479
6786
479
6786

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















