








👨🏫🥰🥳需要机械臂相关资源的同学可以在我的CSDN主页中找到哦🤖😽🦄


指南目录📖:
机械臂速成小指南(二十三):Paul方法求解机械臂运动学逆解(含matlab代码)
🦾🌏🪐以下为正文🦾🌏🪐
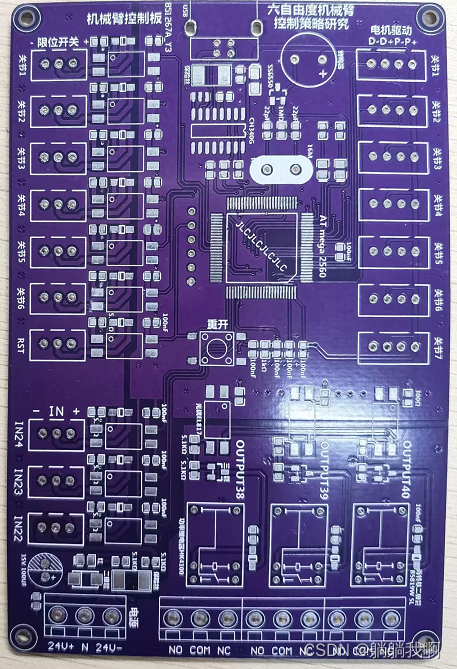
六自由度机械臂上位机python代码(带详细注释,含正逆运动学及轨迹规划等) https://download.csdn.net/download/m0_53966219/87521956?spm=1001.2014.3001.5503六自由度机械臂下位机代码及pcb设计https://download.csdn.net/download/m0_53966219/88480657?spm=1001.2014.3001.5503
https://download.csdn.net/download/m0_53966219/87521956?spm=1001.2014.3001.5503六自由度机械臂下位机代码及pcb设计https://download.csdn.net/download/m0_53966219/88480657?spm=1001.2014.3001.5503
写在前面:
- 这个指南是我(某三流大学的自动化专业)的经验总结,因此内容肯定是浅显的,也许还是易懂的。希望这些文章可以帮大家更快的进入机械臂🦾的世界,要是能在日后研发出拳打德国KUKA 脚踢瑞士ABB的机械臂,那就更好了;
- 内容围绕六自由度机械臂机械臂展开;
- 适用于机械臂初学者🕹️、想要参加全国大学生物联网设计竞赛的同学🥇;
- 主要参考书籍:John J.Craig所著《机器人学导论》📗、Christian Siriano等人所著《机器人学建模、规划与控制》📘;
- 推荐网课:台大(NTU)林沛群教授🧑🎓的机器人学,PPT也蛮好用;
- 要用到arduino(下位机)、matlab(仿真用)、python(编写上位机用,我用的是vscode)、geogebra(作图用,便于理论分析)、xmind(做流程图用)。
一、指南主要内容
1、硬件系统
物质是一切表象的载体,要想学习机械臂,显然需要清楚控制机械臂都要用到什么东西:
- 连杆——相当于你的胳膊🦾
- 关节——和你的关节一样
- 末端执行器——相当于你的手✌️,安装在机械臂的末端,夹爪、吸盘之类的
- 电机——用于驱动关节
- 下位机——单片机,你得用它告诉机械臂怎么动
- 电机驱动——和单片机一起控制机械臂
- 减速器——提高电机的转矩,给它加把劲
- 传动机构——铰链、齿轮、螺杆之类的
- 编码器——检测机械臂关节旋转了多少度,用于闭环控制
- 限位开关——可以用来校准机械臂
- 刹车——用于在断电的时候抱死位置较低的关节,防止机械臂受伤
- 直流稳压电源——给机械臂和下位机供电
- 对机械臂的爱❤️🔥——这个是重中之重
2.运动学分析
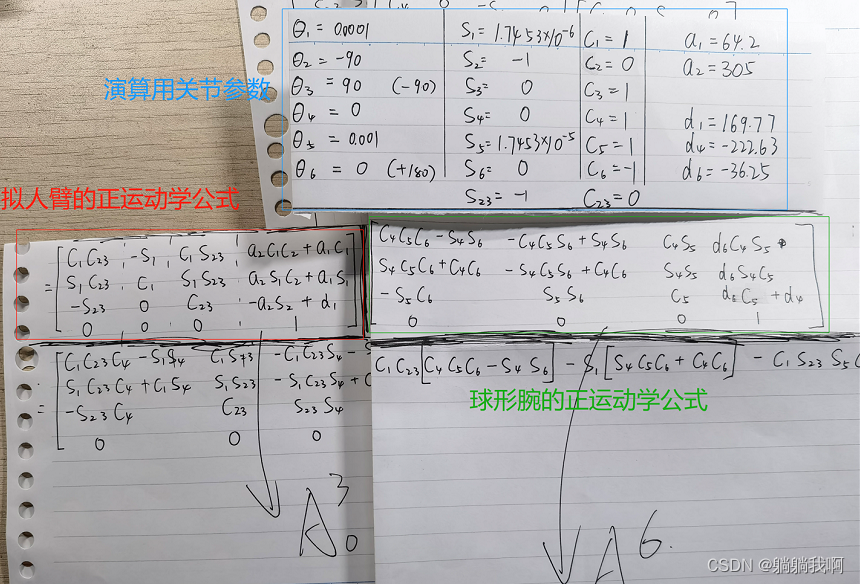
机械臂的运动学可以说是最最最关键的内容了。把机械臂的浑身上下看作肛刚体,通过对它进行运动学分析,可以通过机械臂关节旋转角度(对于旋转关节来说)得到它的末端在哪儿、朝哪儿(位姿),也可通过机械臂在哪儿、朝哪儿(位姿)得到机械臂关节旋转角度(对于旋转关节来说)。
机械臂运动学的主要内容包括使用标准DH法完成机械臂运动学建模、正运动学求解、逆运动学求解、可达工作空间的求解。
3.轨迹规划
机械臂的末端从A点运动到B点必然会在空间中留下运动路径,我们将路径相对于时间的关系称为轨迹。我们肯定是想让机械臂按照期望的轨迹运动嘛,所以轨迹规划应运而生。
本指南中介绍5种简单实用的轨迹规划方法,没有A*算法、B样条、NURBS之类的东西哦,深度学习什么的就更不用说了。。。🙉
二、指南分析方法
1.理论分析
理论分析肯定是要有的,里面有很多很多很多很多矩阵运算。
2.计算机仿真
咱没那个条件去实测机械臂各关节的运动状态,solidworks建模也不太行,还好matlab里有RTB工具箱救我于水火之中,运动学建模及分析、轨迹规划都可以用它。🪄
3.实际应用
是骡子是马都得拉出来溜溜。把对应程序写到上位机(负责计算)与下位机(负责控制电机、限位开关、刹车)里,并使用AE追踪它在空间中实际留下的轨迹。
注:AE使用方法在我的另一篇文章中有说明。🐒《使用AE(After Effects)描绘物体移动路径(一点跟踪)》https://blog.csdn.net/m0_53966219/article/details/124682733?spm=1001.2014.3001.550
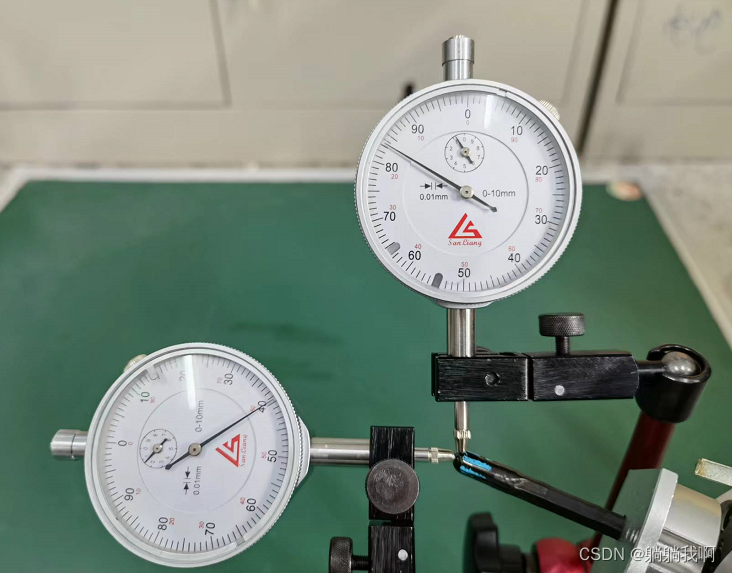
同时,我参考国标设计了一种使用两个百分表检测机械臂重复定位精度的方法(比较粗糙),目的是量化机械臂控制效果,这点还是挺重要的。
选择使用两个百分表测量是因为资金就够买两个。


















 2186
2186

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











