







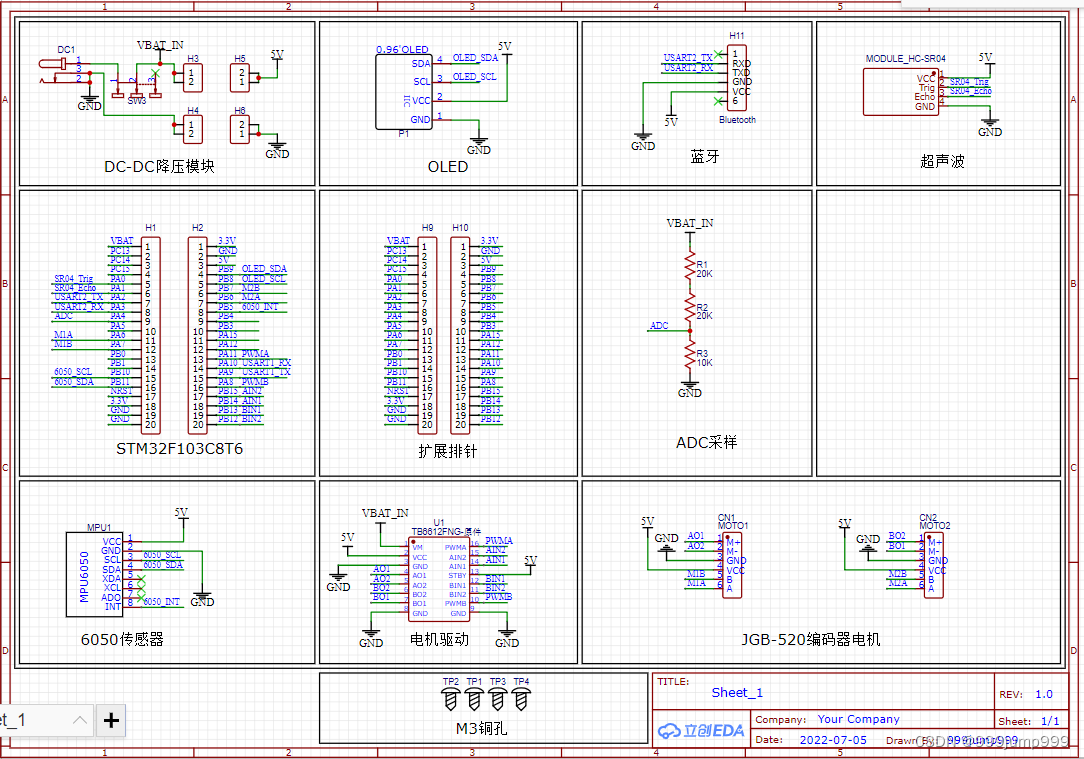
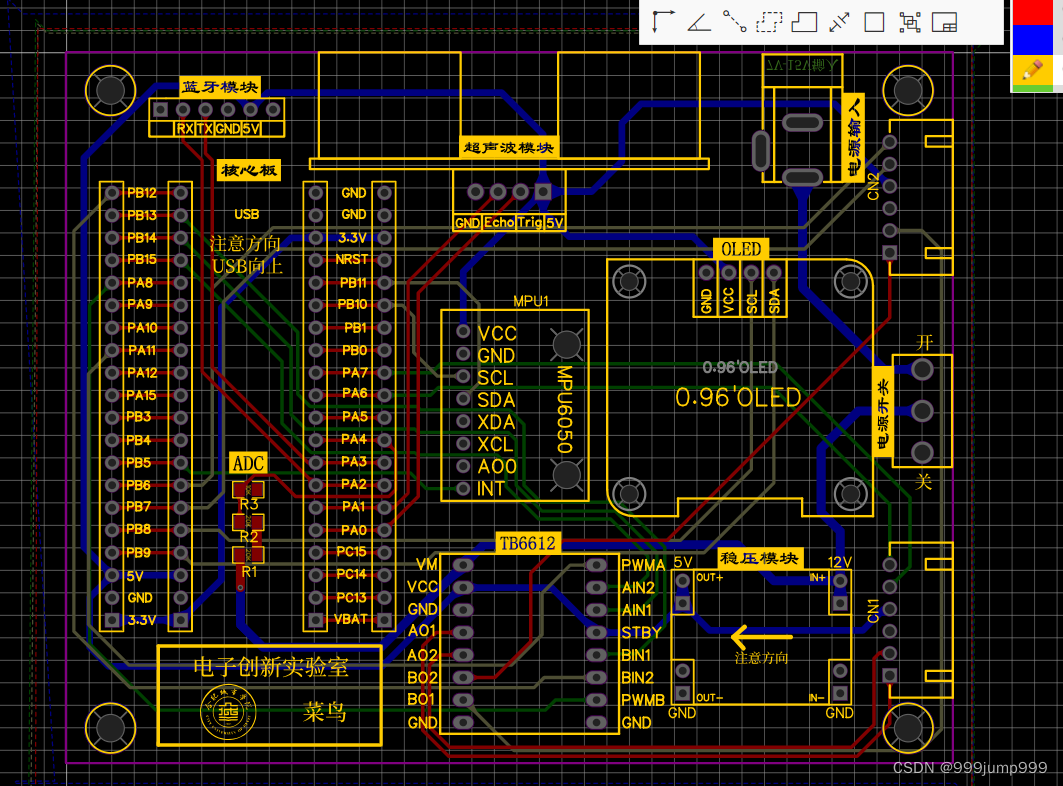
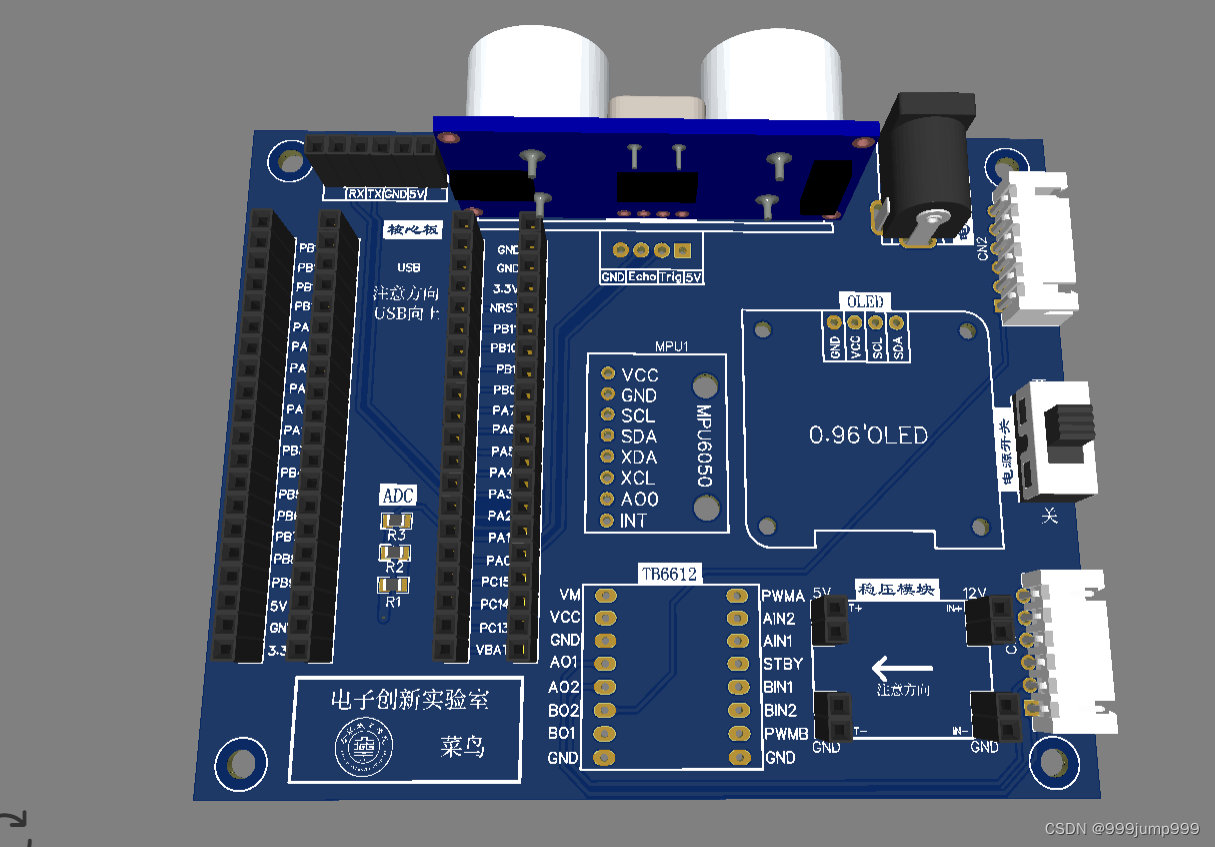
这个PCB是个四层板,嘉立创白嫖,设计的有点不合理,那个电源插座放左右最好
蓝牙对应代码
/****** 蓝牙遥控 *******/
u8 car;
void BT04_Control(void)
{
car = 0;
if(Res == 'E') car = 0;
if(Res == 'A') car = 1;
if(Res == 'B') car = 2;
if(Res == 'C') car = 3;
if(Res == 'D') car = 4;
}/**************** 蓝牙遥控 *************************************/
/*前后*/
if((car!=1)&&(car!=2)&&(car==0))Target_Speed=0;//未接受到前进后退指令-->速度清零,稳在原地
if(car==1)Target_Speed++;//前进1标志位拉高-->需要前进
if(car==2)Target_Speed--;//
Target_Speed = Target_Speed>SPEED_Y?SPEED_Y : (Target_Speed<-SPEED_Y?(-SPEED_Y):Target_Speed);//限幅
/*左右*/
if((car!=3)&&(car!=4)&&(car==0))Turn_Speed=0;
if(car==3)Turn_Speed += -10; //左转
if(car==4)Turn_Speed += 10; //右转
Turn_Speed=Turn_Speed>SPEED_Z?SPEED_Z:(Turn_Speed<-SPEED_Z?(-SPEED_Z):Turn_Speed);//限幅( (20*100) * 100 )
/*转向约束*/
if((car!=3)&&(car!=4)&&(car==0))Turn_Kd=0;//若无左右转向指令,则开启转向约束
else if((car==3)||(car==4))Turn_Kd=0;//若左右转向指令接收到,则去掉转向约束
/*********************************************************************************************/
=====================================================================
完整代码等我上传至码云
完整代码已上传,自行查看,本次设计完全开源,感谢CSDN大佬们的帮助
点我>>>
======================================================================
立创EDA开源>>>















 493
493











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









