






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
ROS教学视频:【Autolabor初级教程】ROS机器人入门_哔哩哔哩_bilibili
课程配套文档:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
后续笔记来源于视频教程截图,辅助理解文档。
一、ROS概述
示例:pandas 是基于NumPy 的一种工具,该工具是为了解决数据分析任务而创建的。
二、ROS通信机制
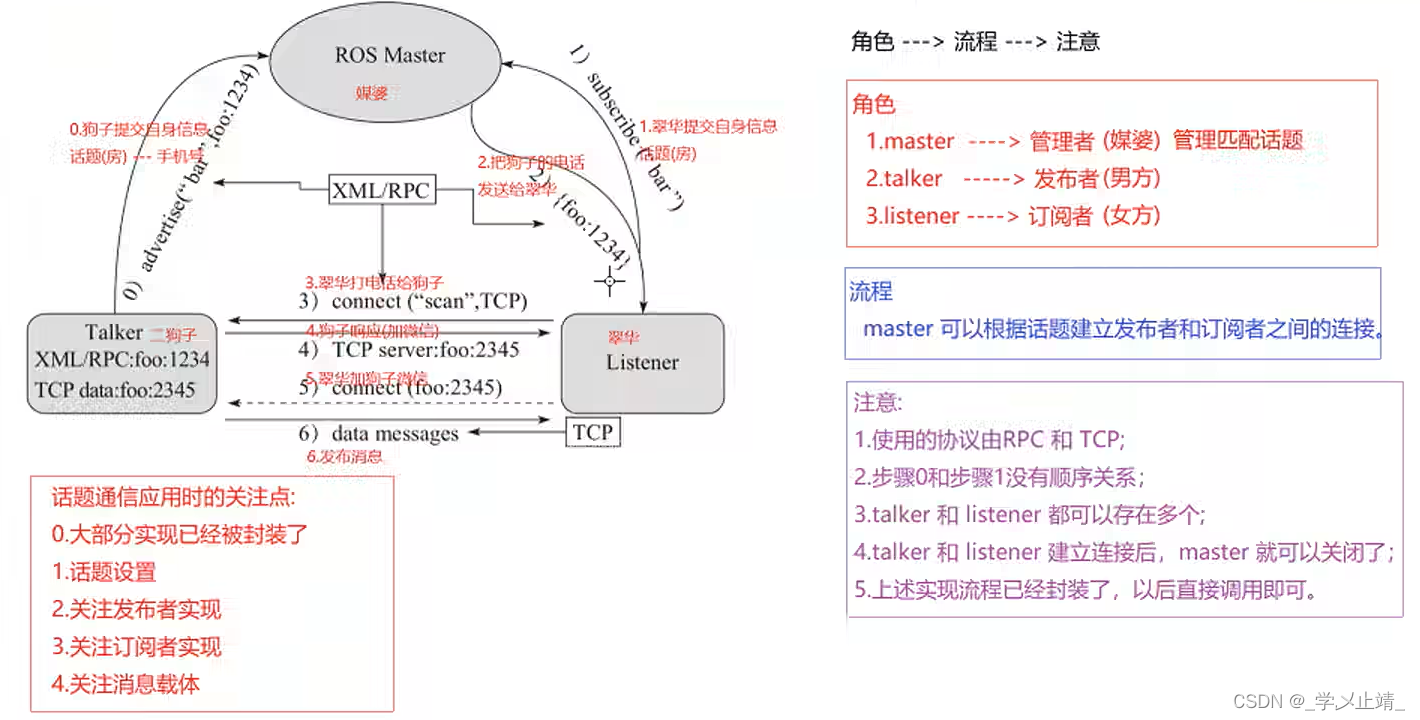
1.话题通信
代码如下(示例):
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
import warnings
warnings.filterwarnings('ignore')
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
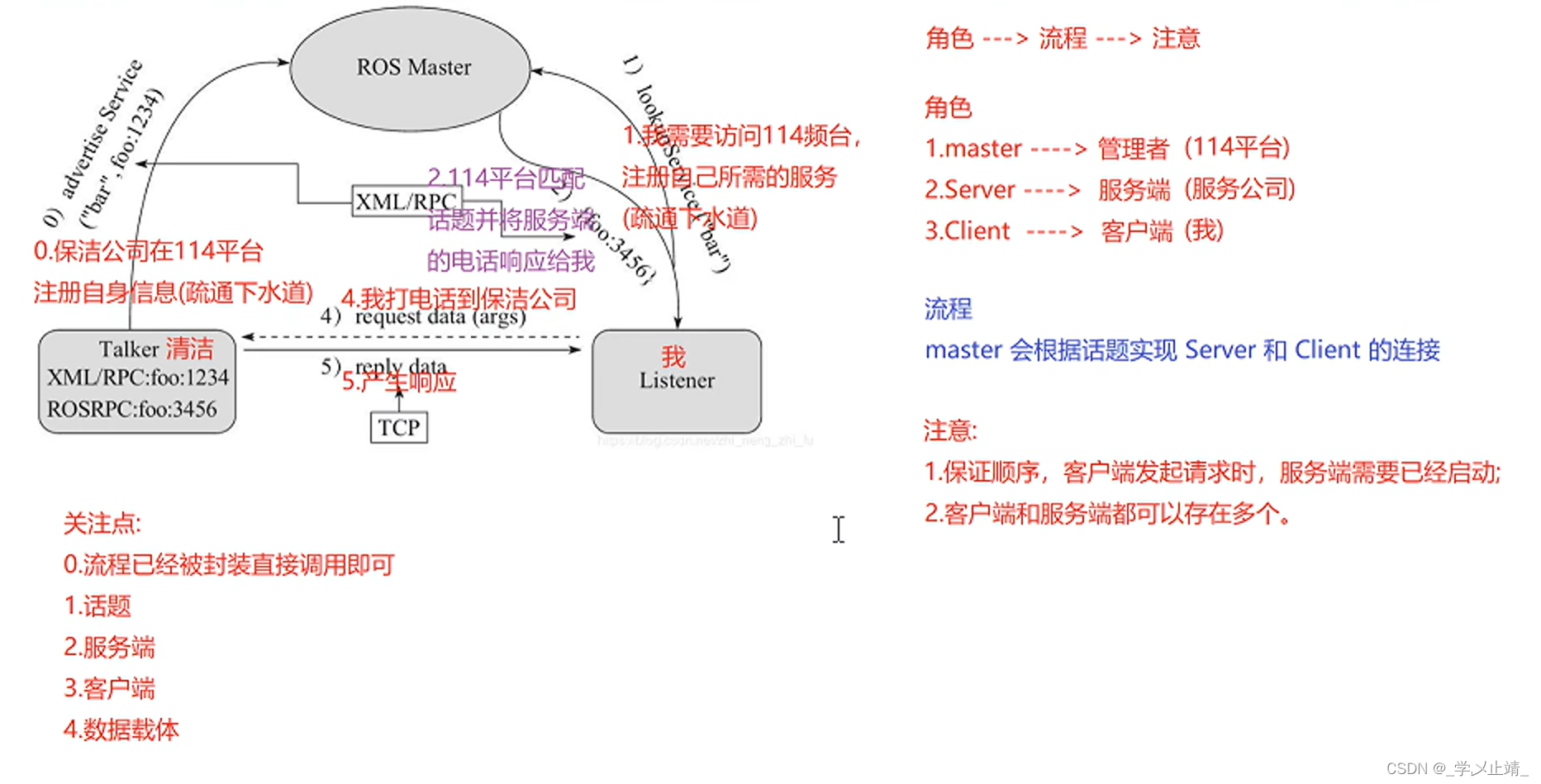
2.服务通信
代码如下(示例):
data = pd.read_csv(
'https://labfile.oss.aliyuncs.com/courses/1283/adult.data.csv')
print(data.head())
该处使用的url网络请求的数据。
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。
















 1687
1687











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









