









在分析之前一定要先编译!
uboot启动流程
一、找到入口函数
uboot是从哪里开始启动的为什么?
1.去Makefile中找链接文件
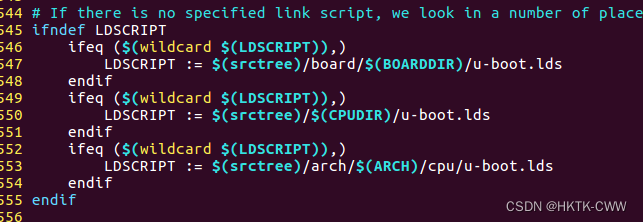
这里有三个lds,经过一一分析,发现最后一个是。
2./uboot-imx-rel_imx_4.1.15_2.1.0_ga/arch/arm/cpu/u-boot.lds:
1.可以通过ENTRY的_start,全局搜索

2.可以在代码段直接找到,是当前目录的对应cpu架构的start.S/C
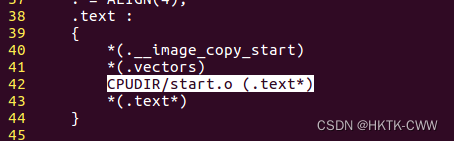
3.我们是armv7

于是我们找到start.S
二、分析start.S
但是发现里面没有_start:于是我们在顶层目录下搜索grep -r “__start”
最终在arch/arm/lib/vectors.S下找到:
48 _start:
49
50 #ifdef CONFIG_SYS_DV_NOR_BOOT_CFG
51 .word CONFIG_SYS_DV_NOR_BOOT_CFG
52 #endif
53
54 b reset
55 ldr pc, _undefined_instruction
56 ldr pc, _software_interrupt
57 ldr pc, _prefetch_abort
58 ldr pc, _data_abort
59 ldr pc, _not_used
60 ldr pc, _irq
61 ldr pc, _fiq
而reset又跳到start.S中
reset:
/* Allow the board to save important registers */
b save_boot_params /*最终会跳到save_boot_params_ret*/
save_boot_params_ret:
/*
* disable interrupts (FIQ and IRQ), also set the cpu to SVC32 mode,
* except if in HYP mode already
*/
/* 进入svc模式,并且关闭fiq与irq */
mrs r0, cpsr
and r1, r0, #0x1f @ mask mode bits
teq r1, #0x1a @ test for HYP mode
bicne r0, r0, #0x1f @ clear all mode bits
orrne r0, r0, #0x13 @ set SVC mode
orr r0, r0, #0xc0 @ disable FIQ and IRQ
msr cpsr,r0
/*
* Setup vector:
* (OMAP4 spl TEXT_BASE is not 32 byte aligned.
* Continue to use ROM code vector only in OMAP4 spl)
*/
/*设置中断向量表到_start*/
#if !(defined(CONFIG_OMAP44XX) && defined(CONFIG_SPL_BUILD))
/* Set V=0 in CP15 SCTLR register - for VBAR to point to vector */
mrc p15, 0, r0, c1, c0, 0 @ Read CP15 SCTLR Register
bic r0, #CR_V @ V = 0
mcr p15, 0, r0, c1, c0, 0 @ Write CP15 SCTLR Register
/* Set vector address in CP15 VBAR register */
ldr r0, =_start
mcr p15, 0, r0, c12, c0, 0 @Set VBAR
#endif
/* the mask ROM code should have PLL and others stable */
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
bl cpu_init_cp15/*disable MMU stuff and caches*/
bl cpu_init_crit/* setup important registers and setup memory timing*/
#endif
bl _main
第一部分主要:
1.设置处理器进入SVC模式
2.关闭FIQ与IRQ
3.设置中断向量表为一开始的_start位置(后面搬移uboot之后会重定位向量表位置)
4.进入_main
三、进入_main
我们在uboot顶层目录下grep -r “_main” ./
结果:

由于我们imx6ull用的是Cortex-A7是32位的,所以是crt0.S
ENTRY(_main)
/*
* Set up initial C runtime environment and call board_init_f(0).
*/
.....
bl board_init_f_alloc_reserve //为后面的board_init_f 留出malloc与gd结构体的内存区域
.....
/* set up gd here, outside any C code */
bl board_init_f_init_reserve //清零gb结构体
.....
bl board_init_f //进行大部分外设的初始化,并且初始化 gd 的各个成员变量,后期将根据这个结构体进行uboot的搬移和向量表的重定位
/*
* Set up intermediate environment (new sp and gd) and call
* relocate_code(addr_moni). Trick here is that we'll return
* 'here' but relocated.
*/
.....
ldr r0, [r9, #GD_RELOCADDR] /* r0 = gd->relocaddr */
b relocate_code //根据gd结构体进行uboot搬移
here:
/*
* now relocate vectors
*/
bl relocate_vectors //根据gd结构体进行向量表重定位
/* Set up final (full) environment */
bl c_runtime_cpu_setup /* we still call old routine here */ //不重要
//清空BSS段
.....
ldr r0, =__bss_start /* this is auto-relocated! */
#ifdef CONFIG_USE_ARCH_MEMSET
ldr r3, =__bss_end /* this is auto-relocated! */
mov r1, #0x00000000 /* prepare zero to clear BSS */
subs r2, r3, r0 /* r2 = memset len */
bl memset
#else
ldr r1, =__bss_end /* this is auto-relocated! */
mov r2, #0x00000000 /* prepare zero to clear BSS */
clbss_l:cmp r0, r1 /* while not at end of BSS */
#if defined(CONFIG_CPU_V7M)
itt lo
#endif
strlo r2, [r0] /* clear 32-bit BSS word */
addlo r0, r0, #4 /* move to next */
blo clbss_l
#endif
//LED灯亮
#if ! defined(CONFIG_SPL_BUILD)
bl coloured_LED_init
bl red_led_on
#endif
//执行board_init_r,剩余部分外设初始化(),最终调用run_main_loop,进行内核加载处理
ldr lr, =board_init_r /* this is auto-relocated! */
or
ldr pc, =boar_init_r /* this is auto-relocated! */
ENDPROC(_main)
第二部分:(重要知识点:gd结构体是uboot搬移的灵魂,后面有一个images结构体则是内核搬移的灵魂)
1.为board_init_f执行预留malloc与gd结构体的内存区域
2.清空gd结构体
3.执行board_init_f 进行大部分外设初始化,并设置gd结构体的各个成员
4.relocate_code,根据gd结构体进行内存搬移
5.relocate_vectors,根据gd结构体重定位向量表
6.清空BSS段
7.LED ON
8.执行boar_init_r, 剩余部分外设初始化(),最终调用run_main_loop,进入第三部分
细讲第二部分:
第二部分中有一些函数是值得细讲的,尤其是board_init_f 与board_init_r函数,我们要知道在它们里面都分别执行了哪些外设的初始化,这样当我们uboot启动遇到问题时才好定位到。
board_init_f :
void board_init_f(ulong boot_flags)
{
#ifdef CONFIG_SYS_GENERIC_GLOBAL_DATA
/*
* For some archtectures, global data is initialized and used before
* calling this function. The data should be preserved. For others,
* CONFIG_SYS_GENERIC_GLOBAL_DATA should be defined and use the stack
* here to host global data until relocation.
*/
gd_t data;
gd = &data;
/*
* Clear global data before it is accessed at debug print
* in initcall_run_list. Otherwise the debug print probably
* get the wrong vaule of gd->have_console.
*/
zero_global_data();
#endif
gd->flags = boot_flags;
gd->have_console = 0;
if (initcall_run_list(init_sequence_f))//依次执行init_sequence_f函数指针结构体中的函数
hang();
#if !defined(CONFIG_ARM) && !defined(CONFIG_SANDBOX) && \
!defined(CONFIG_EFI_APP)
/* NOTREACHED - jump_to_copy() does not return */
hang();
#endif
}
init_sequence_f:
/*****************去掉条件编译语句后的 init_sequence_f***************/
static init_fnc_t init_sequence_f[] = {
setup_mon_len,
initf_malloc,
initf_console_record,
arch_cpu_init, /* basic arch cpu dependent setup */
initf_dm,
arch_cpu_init_dm,
mark_bootstage, /* need timer, go after init dm */
board_early_init_f,
timer_init, /* initialize timer */ //初始化内部定时器,提供uboot时间
board_postclk_init,
get_clocks,
env_init, /* initialize environment */
init_baud_rate, /* initialze baudrate settings */
serial_init, /* serial communications setup */ //初始化串口,在这之后就可以看到uboot在串口打印的一些东西了
console_init_f, /* stage 1 init of console */
display_options, /* say that we are here */
display_text_info, /* show debugging info if required */
print_cpuinfo, /* display cpu info (and speed) */
show_board_info,
INIT_FUNC_WATCHDOG_INIT
INIT_FUNC_WATCHDOG_RESET
init_func_i2c,
announce_dram_init,
/* TODO: unify all these dram functions? */
dram_init, /* configure available RAM banks */ //这里并不是真的dram初始化,真正的在boar_init_r中
post_init_f,
INIT_FUNC_WATCHDOG_RESET
testdram,
INIT_FUNC_WATCHDOG_RESET
INIT_FUNC_WATCHDOG_RESET
/*
* Now that we have DRAM mapped and working, we can
* relocate the code and continue running from DRAM.
*
* Reserve memory at end of RAM for (top down in that order):
* - area that won't get touched by U-Boot and Linux (optional)
* - kernel log buffer
* - protected RAM
* - LCD framebuffer
* - monitor code
* - board info struct
*/
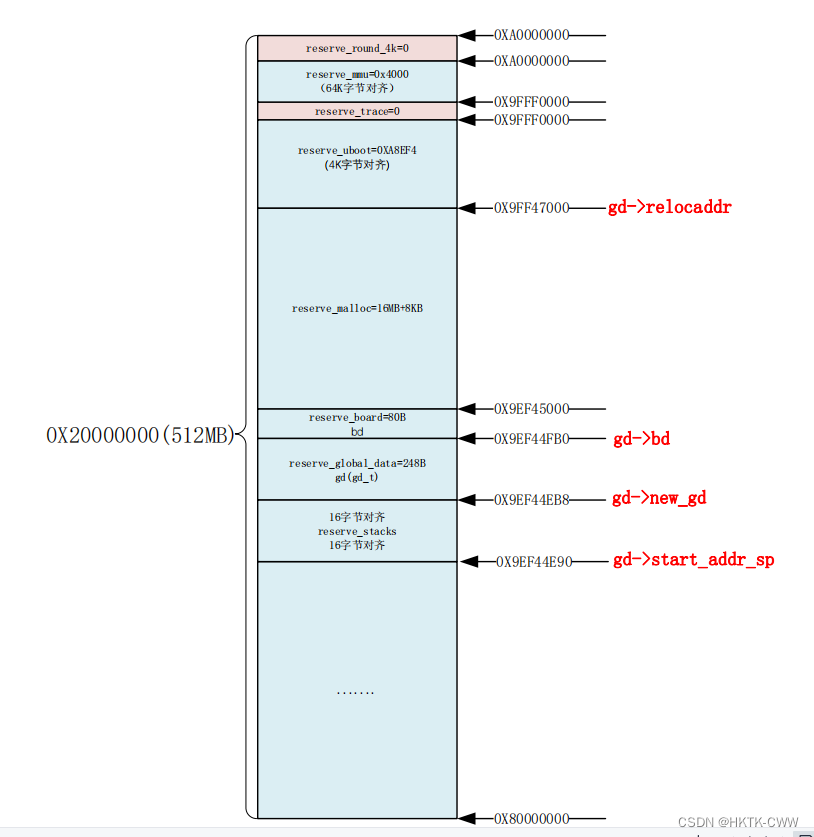
setup_dest_addr,
reserve_round_4k,
reserve_mmu,
reserve_trace,
reserve_uboot, //第一次确定了uboot重定位之后的起始地址(gd->relocaddr)(从高到低)
reserve_malloc,
reserve_board,
setup_machine,
reserve_global_data,
reserve_fdt,
reserve_arch,
reserve_stacks,
setup_dram_config,
show_dram_config,
display_new_sp,
INIT_FUNC_WATCHDOG_RESET
reloc_fdt,
setup_reloc,
NULL,
};
要是以后外设出现了问题或者说是uboot打印一些东西不对,就可以对应到这里来找。
board_init_r:
void board_init_r(gd_t *new_gd, ulong dest_addr)
{
#ifdef CONFIG_NEEDS_MANUAL_RELOC
int i;
#endif
#ifdef CONFIG_AVR32
mmu_init_r(dest_addr);
#endif
#if !defined(CONFIG_X86) && !defined(CONFIG_ARM) && !defined(CONFIG_ARM64)
gd = new_gd;
#endif
#ifdef CONFIG_NEEDS_MANUAL_RELOC
for (i = 0; i < ARRAY_SIZE(init_sequence_r); i++) //不断执行init_sequence_r中的函数
init_sequence_r[i] += gd->reloc_off;
#endif
if (initcall_run_list(init_sequence_r))
hang();
/* NOTREACHED - run_main_loop() does not return */
hang();
}
init_sequence_r:
init_fnc_t init_sequence_r[] = {
initr_trace,
initr_reloc,
initr_caches,
initr_reloc_global_data,
initr_barrier,
initr_malloc, //初始化malloc
initr_console_record,
bootstage_relocate,
initr_bootstage,
board_init, /* Setup chipselects *///板级初始化,调用到board/xxx/xxx中xxx.c的board_init
stdio_init_tables,//各种输入输出设备的初始化,如 LCD driver
initr_serial,
initr_announce,
INIT_FUNC_WATCHDOG_RESET,
INIT_FUNC_WATCHDOG_RESET,
INIT_FUNC_WATCHDOG_RESET,
power_init_board,
initr_flash,
INIT_FUNC_WATCHDOG_RESET,
initr_nand,//初始化nand,如果是nand启动,这两句用于初始化外存
initr_mmc,//初始化emmc,如果是emmc启动
initr_env,
INIT_FUNC_WATCHDOG_RESET,
initr_secondary_cpu,
INIT_FUNC_WATCHDOG_RESET,
stdio_add_devices,
initr_jumptable,
console_init_r, /* fully init console as a device */ //初始化控制台
INIT_FUNC_WATCHDOG_RESET,
interrupt_init, //初始化中断
initr_enable_interrupts, //使能中断
initr_ethaddr,
board_late_init,
INIT_FUNC_WATCHDOG_RESET,
INIT_FUNC_WATCHDOG_RESET,
INIT_FUNC_WATCHDOG_RESET,
initr_net, //初始化网络
INIT_FUNC_WATCHDOG_RESET,
run_main_loop,
};
四、run_main_loop
当第二部分完成一些外设初始化以及uboot搬移工作之后就可以进行内核加载工作了。
static int run_main_loop(void)
{
#ifdef CONFIG_SANDBOX
sandbox_main_loop_init();
#endif
/* main_loop() can return to retry autoboot, if so just run it again */
for (;;)
main_loop();
return 0;
}
void main_loop(void)
{
const char *s;
bootstage_mark_name(BOOTSTAGE_ID_MAIN_LOOP, "main_loop");
#ifndef CONFIG_SYS_GENERIC_BOARD
puts("Warning: Your board does not use generic board. Please read\n");
puts("doc/README.generic-board and take action. Boards not\n");
puts("upgraded by the late 2014 may break or be removed.\n");
#endif
#ifdef CONFIG_VERSION_VARIABLE
setenv("ver", version_string); /* set version variable */ //设置ver环境变量
#endif /* CONFIG_VERSION_VARIABLE */
cli_init();//初始化shell环境
run_preboot_environment_command(); //不重要
#if defined(CONFIG_UPDATE_TFTP)
update_tftp(0UL, NULL, NULL);
#endif /* CONFIG_UPDATE_TFTP */
s = bootdelay_process();//1.获取延时时间 2.返回bootcmd命令
if (cli_process_fdt(&s))
cli_secure_boot_cmd(s);
autoboot_command(s);//检查倒计时结束是否按下回车,如果是则跳到下一步,不是则执行bootcmd命令
cli_loop();//如果按下回车,进行命令处理,这一步不重要,因为基本不会有问题
}
执行bootz命令:(内核加载的灵魂images结构体变量)
一般我们会配置bootcmd命令为bootz xxx-xxx
那么bootz 命令的执行函数为 do_bootz。
先了解images:
43 bootm_headers_t images;
typedef struct bootm_headers {
/*
* Legacy os image header, if it is a multi component image
* then boot_get_ramdisk() and get_fdt() will attempt to get
* data from second and third component accordingly.
*/
image_header_t *legacy_hdr_os; /* image header pointer */
image_header_t legacy_hdr_os_copy; /* header copy */
ulong legacy_hdr_valid;
...
#ifndef USE_HOSTCC
image_info_t os; /* OS 镜像信息 */ //image_info_t也是个结构体需要我们了解
ulong ep; /* OS 入口点 */
ulong rd_start, rd_end; /* ramdisk 开始和结束位置 */
char *ft_addr; /* 设备树地址 */
ulong ft_len; /* 设备树长度 */
ulong initrd_start; /* initrd 开始位置 */
ulong initrd_end; /* initrd 结束位置 */
ulong cmdline_start; /* cmdline 开始位置 */
ulong cmdline_end; /* cmdline 结束位置 */
bd_t *kbd;
#endif
int verify; /* getenv("verify")[0] != 'n' */
#define BOOTM_STATE_START (0x00000001)
#define BOOTM_STATE_FINDOS (0x00000002)
#define BOOTM_STATE_FINDOTHER (0x00000004)
#define BOOTM_STATE_LOADOS (0x00000008)
#define BOOTM_STATE_RAMDISK (0x00000010)
#define BOOTM_STATE_FDT (0x00000020)
#define BOOTM_STATE_OS_CMDLINE (0x00000040)
#define BOOTM_STATE_OS_BD_T (0x00000080)
#define BOOTM_STATE_OS_PREP (0x00000100)
#define BOOTM_STATE_OS_FAKE_GO (0x00000200)/*'Almost' run the OS*/
#define BOOTM_STATE_OS_GO (0x00000400)
int state;
#ifdef CONFIG_LMB
struct lmb lmb; /* 内存管理相关,不深入研究 */
#endif
} bootm_headers_t;
image_info_t:
typedef struct image_info {
ulong start, end; /* start/end of blob */
ulong image_start, image_len; /* start of image within blob, len of image */
ulong load; /* load addr for the image */
uint8_t comp, type, os; /* compression, type of image, os type */ //最终uboot是根据image_info中的os来获取linux内核加载函数的(uboot中有一组不同系统的内核加载函数,需要进行选择)
uint8_t arch; /* CPU architecture */
} image_info_t;
do_bootz:(bootz命令会执行这个函数)
int do_bootz(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[])
{
int ret;
/* Consume 'bootz' */
argc--; argv++;
if (bootz_start(cmdtp, flag, argc, argv, &images))
return 1;
/*
* We are doing the BOOTM_STATE_LOADOS state ourselves, so must
* disable interrupts ourselves
*/
bootm_disable_interrupts();
images.os.os = IH_OS_LINUX; //写死了选择启动linux
ret = do_bootm_states(cmdtp, flag, argc, argv,
BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO |
BOOTM_STATE_OS_GO,
&images, 1);
return ret;
}
关于选择启动系统,其实在uboot中有一个系统启动函数指针数组,uboot通过images.os.os来判断要启动的是哪一个内核。
static boot_os_fn *boot_os[] = {
[IH_OS_U_BOOT] = do_bootm_standalone,
#ifdef CONFIG_BOOTM_LINUX
[IH_OS_LINUX] = do_bootm_linux,//启动linux
#endif
#ifdef CONFIG_BOOTM_NETBSD
[IH_OS_NETBSD] = do_bootm_netbsd,
#endif
#ifdef CONFIG_LYNXKDI
[IH_OS_LYNXOS] = do_bootm_lynxkdi,
#endif
#ifdef CONFIG_BOOTM_RTEMS
[IH_OS_RTEMS] = do_bootm_rtems,
#endif
#if defined(CONFIG_BOOTM_OSE)
[IH_OS_OSE] = do_bootm_ose,
#endif
#if defined(CONFIG_BOOTM_PLAN9)
[IH_OS_PLAN9] = do_bootm_plan9,
#endif
#if defined(CONFIG_BOOTM_VXWORKS) && \
(defined(CONFIG_PPC) || defined(CONFIG_ARM))
[IH_OS_VXWORKS] = do_bootm_vxworks,
#endif
#if defined(CONFIG_CMD_ELF)
[IH_OS_QNX] = do_bootm_qnxelf,
#endif
#ifdef CONFIG_INTEGRITY
[IH_OS_INTEGRITY] = do_bootm_integrity,
#endif
#ifdef CONFIG_BOOTM_OPENRTOS
[IH_OS_OPENRTOS] = do_bootm_openrtos,
#endif
};
继续分析do_bootz函数:
1. bootz_start
static int bootz_start(cmd_tbl_t *cmdtp, int flag, int argc,
char * const argv[], bootm_headers_t *images)
{
int ret;
ulong zi_start, zi_end;
ret = do_bootm_states(cmdtp, flag, argc, argv, BOOTM_STATE_START,
images, 1); //注意do_bootm_states这个函数很特殊,它是分阶段执行的(通过里面的switch)这里执行的是BOOTM_STATE_START开始阶段
//设置images的加载起始位置
/* Setup Linux kernel zImage entry point */
if (!argc) {
images->ep = load_addr;
debug("* kernel: default image load address = 0x%08lx\n",
load_addr);
} else {
images->ep = simple_strtoul(argv[0], NULL, 16);
debug("* kernel: cmdline image address = 0x%08lx\n",
images->ep);
}
//执行bootz_setup,在其中会打印内核启动信息
ret = bootz_setup(images->ep, &zi_start, &zi_end);
.....
}
bootz_setup:
int bootz_setup(ulong image, ulong *start, ulong *end)
{
struct zimage_header *zi;
zi = (struct zimage_header *)map_sysmem(image, 0);
if (zi->zi_magic != LINUX_ARM_ZIMAGE_MAGIC) {//如果起始位置没有/不是linux内核
puts("Bad Linux ARM zImage magic!\n");
return 1;
}
*start = zi->zi_start;
*end = zi->zi_end;
printf("Kernel image @ %#08lx [ %#08lx - %#08lx ]\n", image, *start,
*end);//如果是则打印启动信息
return 0;
}
bootz_start 主要用于初始化 images 的相关成员变量。
2. do_bootm_states(由于do_bootz函数调用它时只给了BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO | BOOTM_STATE_OS_GO,三种状态于是我们只需要分析这三就行)
执行do_bootm_states的另外状态。
int do_bootm_states(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[],
int states, bootm_headers_t *images, int boot_progress)
{
boot_os_fn *boot_fn;
ulong iflag = 0;
int ret = 0, need_boot_fn;
images->state |= states;
/*
* Work through the states and see how far we get. We stop on
* any error.
*/
//bootz_start调用的
if (states & BOOTM_STATE_START)
ret = bootm_start(cmdtp, flag, argc, argv);
.....
.....
//根据images->os.os获取启动函数
/* From now on, we need the OS boot function */
if (ret)
return ret;
boot_fn = bootm_os_get_boot_func(images->os.os);
need_boot_fn = states & (BOOTM_STATE_OS_CMDLINE |
BOOTM_STATE_OS_BD_T | BOOTM_STATE_OS_PREP |
BOOTM_STATE_OS_FAKE_GO | BOOTM_STATE_OS_GO);
if (boot_fn == NULL && need_boot_fn) {
if (iflag)
enable_interrupts();
printf("ERROR: booting os '%s' (%d) is not supported\n",
genimg_get_os_name(images->os.os), images->os.os);
bootstage_error(BOOTSTAGE_ID_CHECK_BOOT_OS);
return 1;
}
//主要用于处理环境变量bootargs,bootargs 保存着传递给 Linux kernel 的参数。
if (!ret && (states & BOOTM_STATE_OS_PREP))
ret = boot_fn(BOOTM_STATE_OS_PREP, argc, argv, images);
//一般不使能它
#ifdef CONFIG_TRACE
/* Pretend to run the OS, then run a user command */
if (!ret && (states & BOOTM_STATE_OS_FAKE_GO)) {
char *cmd_list = getenv("fakegocmd");
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_FAKE_GO,
images, boot_fn);
if (!ret && cmd_list)
ret = run_command_list(cmd_list, -1, flag);
}
#endif
/* Check for unsupported subcommand. */
if (ret) {
puts("subcommand not supported\n");
return ret;
}
//获取到启动函数后启动内核,不再返回
/* Now run the OS! We hope this doesn't return */
if (!ret && (states & BOOTM_STATE_OS_GO))
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_GO,
images, boot_fn);
.....
return ret;
}
总结一下do_bootz:
1.bootz_start
->do_bootm_states BOOTM_STATE_START 状态,清空images
->bootz_setup 设置images起始地址,判断内核,打印内核信息
2.do_bootm_states BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO | BOOTM_STATE_OS_GO状态
-> 根据images->os->os获取内核加载函数do_bootm_linux
->BOOTM_STATE_OS_PREP bootargs 保存着传递给 Linux kernel 的参数
-> BOOTM_STATE_OS_FAKE_GO 一般不执行
->BOOTM_STATE_OS_GO 执行内核加载函数do_bootm_linux
do_bootm_linux加载内核:
int do_bootm_linux(int flag, int argc, char * const argv[],
bootm_headers_t *images)
{
/* No need for those on ARM */
if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)
return -1;
if (flag & BOOTM_STATE_OS_PREP) {
boot_prep_linux(images);
return 0;
}
if (flag & (BOOTM_STATE_OS_GO | BOOTM_STATE_OS_FAKE_GO)) {
boot_jump_linux(images, flag);
return 0;
}
boot_prep_linux(images);
boot_jump_linux(images, flag);//goto
return 0;
}
static void boot_jump_linux(bootm_headers_t *images, int flag)
{
#ifdef CONFIG_ARM64
void (*kernel_entry)(void *fdt_addr, void *res0, void *res1,
void *res2);
int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
kernel_entry = (void (*)(void *fdt_addr, void *res0, void *res1,
void *res2))images->ep;
debug("## Transferring control to Linux (at address %lx)...\n",
(ulong) kernel_entry);
bootstage_mark(BOOTSTAGE_ID_RUN_OS);
announce_and_cleanup(fake);//会打印Starting Kernel.....
if (!fake) {
do_nonsec_virt_switch();
kernel_entry(images->ft_addr, NULL, NULL, NULL);
}
#else
unsigned long machid = gd->bd->bi_arch_number;
char *s;
void (*kernel_entry)(int zero, int arch, uint params);
unsigned long r2;
int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
kernel_entry = (void (*)(int, int, uint))images->ep;
s = getenv("machid");
if (s) {
if (strict_strtoul(s, 16, &machid) < 0) {
debug("strict_strtoul failed!\n");
return;
}
printf("Using machid 0x%lx from environment\n", machid);
}
debug("## Transferring control to Linux (at address %08lx)" \
"...\n", (ulong) kernel_entry);
bootstage_mark(BOOTSTAGE_ID_RUN_OS);
announce_and_cleanup(fake);//announce_and_cleanup 来打印一些信息并做一些清理工作
if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len)
r2 = (unsigned long)images->ft_addr;
else
r2 = gd->bd->bi_boot_params;
if (!fake) {
#ifdef CONFIG_ARMV7_NONSEC
if (armv7_boot_nonsec()) {
armv7_init_nonsec();
secure_ram_addr(_do_nonsec_entry)(kernel_entry,
0, machid, r2);
} else
#endif
kernel_entry(0, machid, r2);/*跳到内核的第一行代码,kernel_entry就是内核的第一行代码标号,由于第一行代码是汇编,所以传的是r0,r1,r2 其中:
r1 :machid是机器的id,!如果使用设备树的话这个 machid 就无效了,
r2: 如果使用设备树的话是设备树地址否则bootargs
*/
}
#endif
}
其它的问题:
一、uboot重定位:
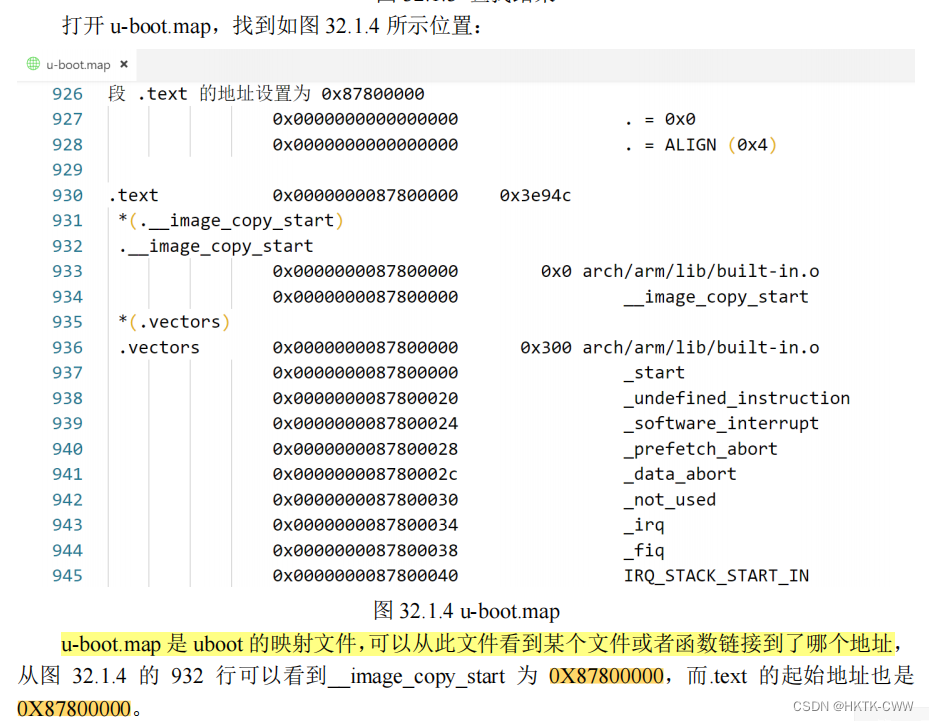
要知道uboot重定位之前的起始地址(重定位之后的起始地址可以从board_init_f中的reserve_uboot找到),可以编译之后在顶层目录下找到u-boot.map文件,可以通过它来查看。
uboot重定位表:
二、如何指定uboot启动时的console?
在启动linux内核的时候会根据bootargs来确定一些信息,比如“console=ttymxc0,115200”,控制console是串口1(ttymxc0-4)这些是串口1-5都是NXP定的好像。
那么在uboot的启动的时候console又是什么?它是由什么来定的呢?
可以通过设置环境变量:
setenv stdin serial
setenv stdout serial
setenv stderr serial
在uboot启动的:
board_init_r
->console_init_r中
console_init_r在common/console.c中。
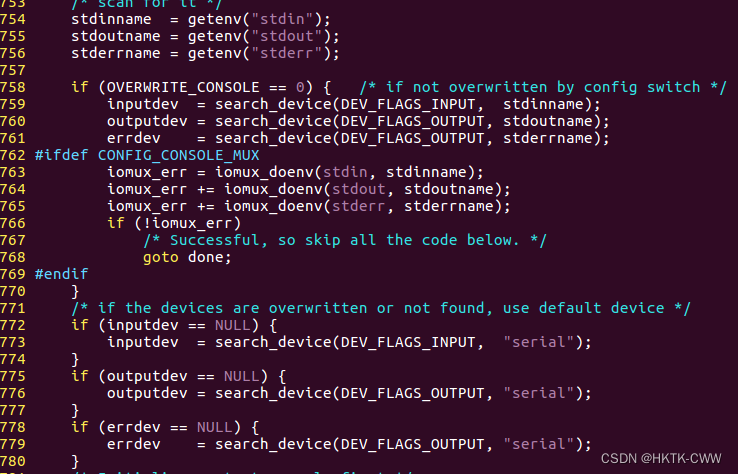
可以看到先是分别获得环境变量,后面是,如果全部为空,默认为serial。
那串口很多,到底是哪一个串口?
这时可以查看include/configs下对应的.h文件了。
宏 CONFIG_MXC_UART_BASE 表示串口寄存器基地址,这里使用的串口 1,基地址为 UART1_BASE,
这个是可以自己配置的,在移植的时候必须在include/configs下添加自己的.h文件。
三、是不是有一些参数是固定的,不能随意给的?
比如:
bootcmd 'tftp 80800000 zImage; tftp 83000000 imx6ull-alientek-emmc.dtb; bootz 80800000 - 83000000'
中的80800000是不是一定要这个,而不能随意的给的?
解答:
在 U-Boot 中,控制内核 zImage 起始位置的是 bootcmd 中 bootz 命令给定的位置。CONFIG_SYS_LOAD_ADDR 变量在 include/configs 目录下的配置文件中定义,是指 U-Boot 加载内核镜像的默认地址。在 bootcmd 中使用 bootz 命令时,可以通过指定 bootz 命令的参数来覆盖 CONFIG_SYS_LOAD_ADDR 的值,从而加载指定位置的内核镜像。
其它配置也一样,比如前面的串口,如果不再参数中配置,那么默认根据include/configs下的配置文件就是serial。
stdin serial
setenv stdout serial
setenv stderr serial
在uboot启动的:
board_init_r
->console_init_r中
console_init_r在common/console.c中。
[外链图片转存中…(img-isEdYMyA-1686573795750)]
可以看到先是分别获得环境变量,后面是,如果全部为空,默认为serial。
四、那串口很多,到底是哪一个串口?
这时可以查看include/configs下对应的.h文件了。
宏 CONFIG_MXC_UART_BASE 表示串口寄存器基地址,这里使用的串口 1,基地址为 UART1_BASE,
这个是可以自己配置的,在移植的时候必须在include/configs下添加自己的.h文件。














 2751
2751











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









