







使用ARM架构机载电脑,PC端远程通过mavros连接飞控
平台:旭日X3
ROS版本:noetic
在安装ROS时发现了一个问题,就是在ROOT模式下正常可以启动roscore,但是在普通用户模式下无法启动roscore,我解决此问题的方法是参考了这篇博客:https://blog.csdn.net/weixin_46639310/article/details/133024546
之后安装mavros:
mavros安装步骤:
安装Mavros
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras -y
此时可以查看 /usr/share/ 下多了一个 GeographicLib 文件夹
安装Mavros所需的依赖项
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
这个过程应该会很漫长
给予权限
sudo chmod +x ./install_geographiclib_datasets.sh
运行该脚本下载所需文件
sudo ./install_geographiclib_datasets.sh
至此,mavros安装成功
找到目录/opt/ros/noetic/share/mavros/launch/
找到px4.launch
我们不在源文件上改,复制一个px4_ACM0.launch文件,内容如下:只修改这两句
<arg name="fcu_url" default="/dev/ttyACM0:921600" />
<arg name="gcs_url" default="udp://:14550@" />
注意要将qgc里的mav1_config和波特率和模式改一下


之后运行
roslaunch mavros px4_ACM0.launch
QGC添加通信连接:
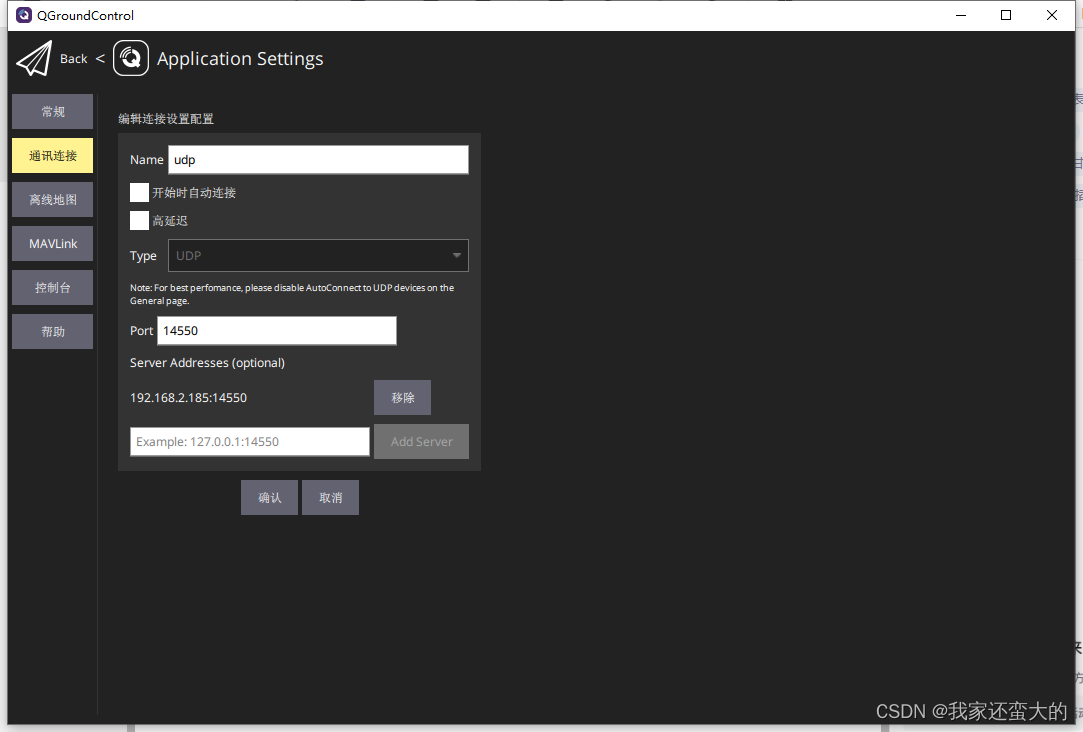
之后即可远程连接飞控!
也可以通过telem2和串口相连接,连接图为:
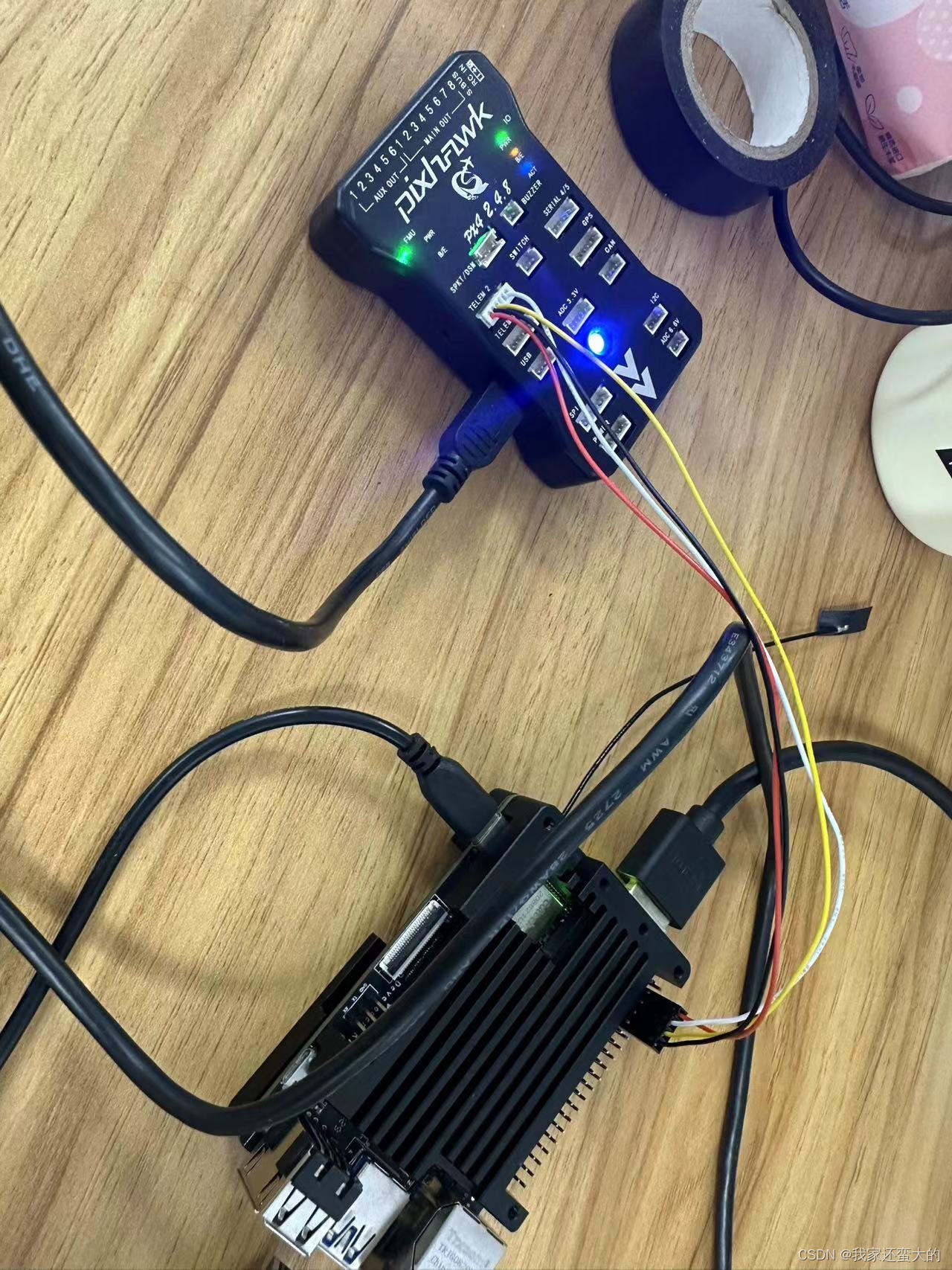
telem2接口分别是:
5V TX RX … … GND
和RDK X3 TX RX 交叉连接
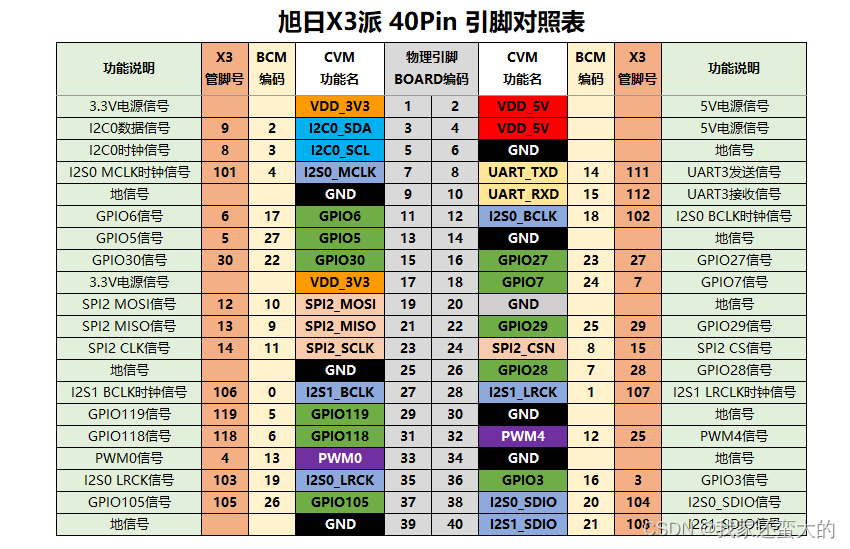
新建px4_S3.launch,内容修改:
<arg name="fcu_url" default="/dev/ttyS3:921600" />
<arg name="gcs_url" default="udp://:14550@" />
运行步骤和上面一样,运行前别忘记赋予其权限:
sudo chmod 777 /dev/ttyS3
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









