







旭日X3派 安装D435iSDK和realsense-ros包
平台:旭日X3
ROS版本:noetic
librealsense版本为v2.50.0 realsense-ros版本为v2.3.2,其他版本试了都有点问题
安装librealsense SDK
下载源码
git clone -b v2.50.0 https://github.com/IntelRealSense/librealsense.git
进入安装目录
cd librealsense
安装依赖
./scripts/setup_udev_rules.sh
mkdir build && cd build
cmake .. -DBUILD_EXAMPLES=true -DCMAKE_BUILD_TYPE=release -DFORCE_RSUSB_BACKEND=false && make -j$(($(nproc)-1)) && sudo make install
安装好后输入
realsense-viewer
我的是打不开,
关机重启即可。
下载编译并安装realsense-ros 2.3.2
必须要下载2.3.2版本
创建工作空间
记得安装catkin-tools
mkdir catkin_ws
cd catkin_ws
mkdir src
cd ..
catkin init
cd src
git clone -b 2.3.2 https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
catkin build --cmake-args -DCATKIN_ENABLE_TESTING=OFF -DCMAKE_BUILD_TYPE=Release
catkin config --install
catkin build
echo "source ~/realsense-ros_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
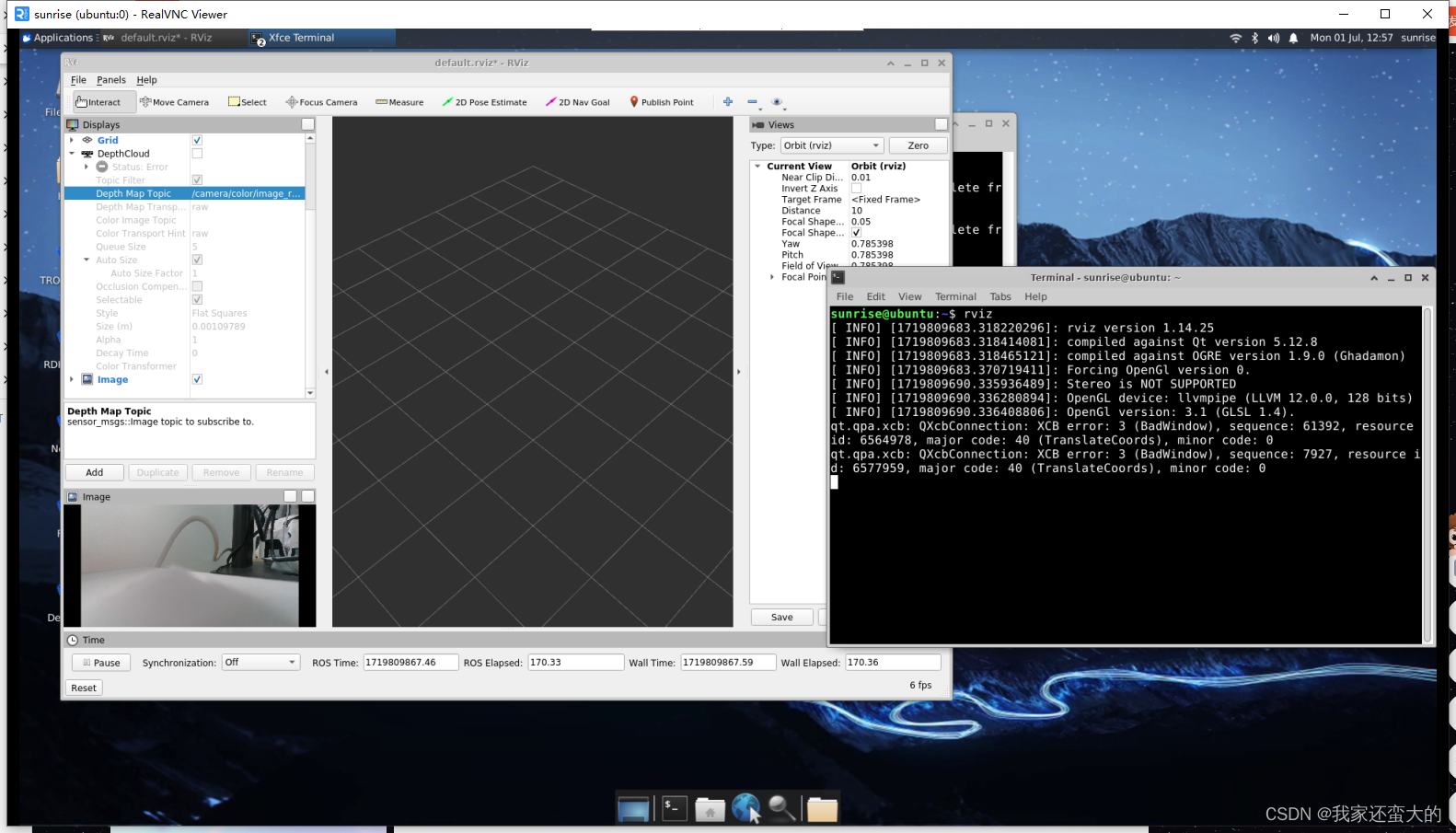
安装完成后,启动相机节点
roslaunch realsense2_camera rs_camera.launch
打开rviz后添加image 可以看到相机正常工作















 641
641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









