






4、计算平面机构自由度的注意事项
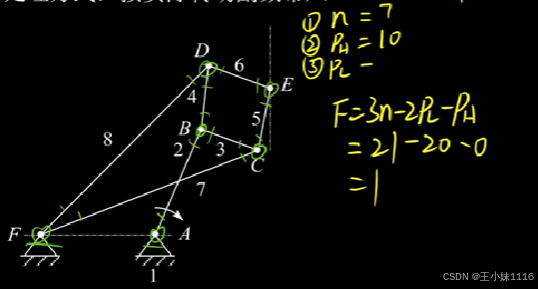
1)复合铰链问题
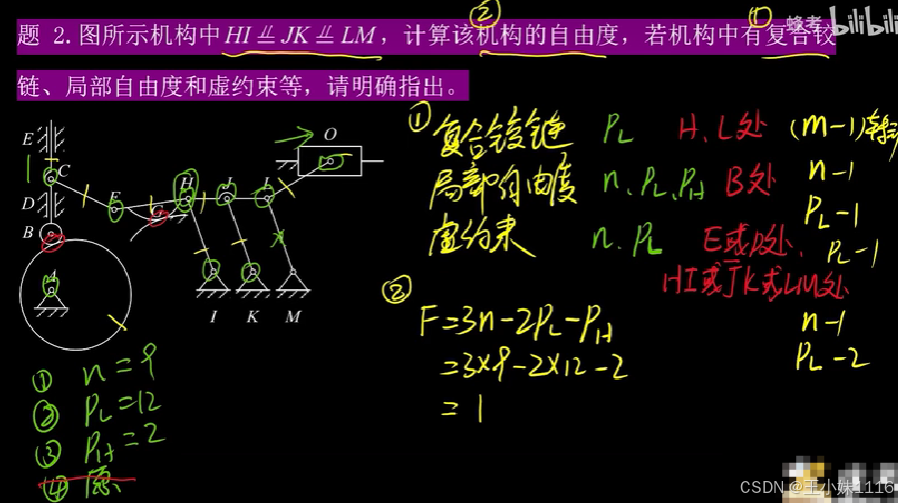
概念:两个以上的机构在同一处以转动副相连接,就构成了复合铰链。构件数为m时,共有 (m-1)个转动副。例:三个构件在同一处连接构成转动副,则有3-1个转动副
计算时处理方式:按实际转动副数(m-1)带入
①:确定活动构件n;②确定平面低副个数PL;③确定平面高副个数PH
带入公式F=3n-2PL-PH
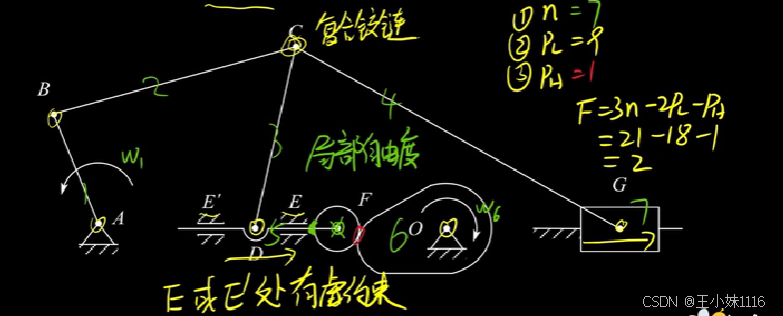
2)局部自由度问题
概念:某些构件所产生的局部运动并不影响其他构件的运动。这种局部运动成为局部自由度
重点掌握的局部自由度是滚子推杆凸轮机构中滚子中心的转动副
计算时的处理方法:将滚子推杆视为尖顶推杆,构件数为1,只有一个高副
将滚子中心看成固定,减少一个活动构建,减少一个转动副,减少一个平面低副

3)虚约束问题
概念:有些运动副带入的约束对机构的运动只起重复约束作业,将其成为虚约束
常见虚约束:
(1)导路平行或重合的移动副,只有一个起作用,其余为虚约束--E和E`具有相同功能
具有确定运动
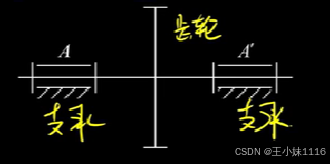
(2)两构件之间组成多个轴线重合的运动副,只有一个起作用,其余为虚约束
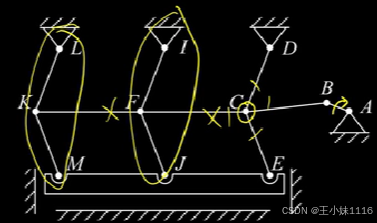
(3)机构中不起独立作用的对称、重复部分。出现对称或平行要注意
计算时的处理方法:去除引入虚约束的构件与运动副
F=3n-2PL-PH
例题1:C点的构件不算是活动构件,原动件:有运动的;齿轮被固定后,齿轮和固定点会产生平面低副--转动副

例2:虽然HI、JK、LM是平行且相等的构件,满足虚约束的条件,但是此处智能去掉其中一个构件,因为三者任意两者要保持平行四边形的构造,因此不可和上面一致直接去掉两个,去掉LM杆后,L点仍有转动副存在
5、熟读瞬心及其位置
1)瞬心的概念
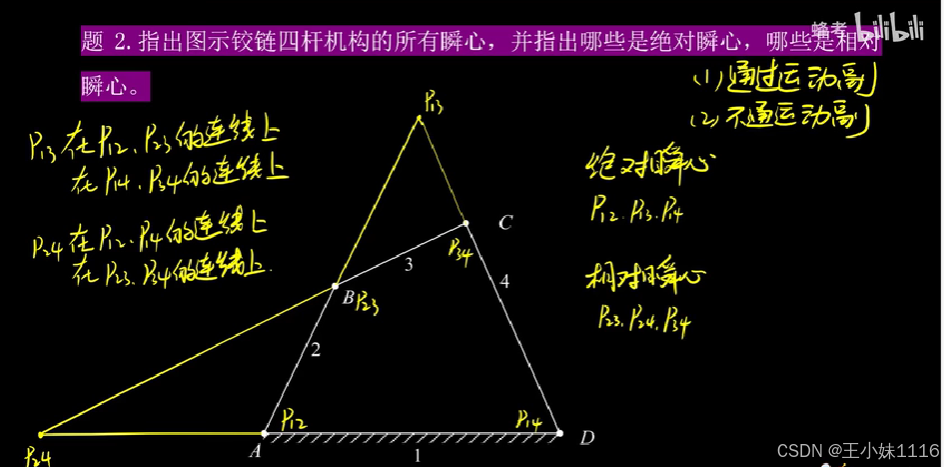
(1)瞬心的概念:瞬心是互作平面相对运动两构件上瞬时速度相等的重合点。
若瞬心的绝对速度为0,则为绝对瞬心;绝对速度不为0,则相对瞬心
两构件其一为机架有绝对瞬心;否则为相对瞬心
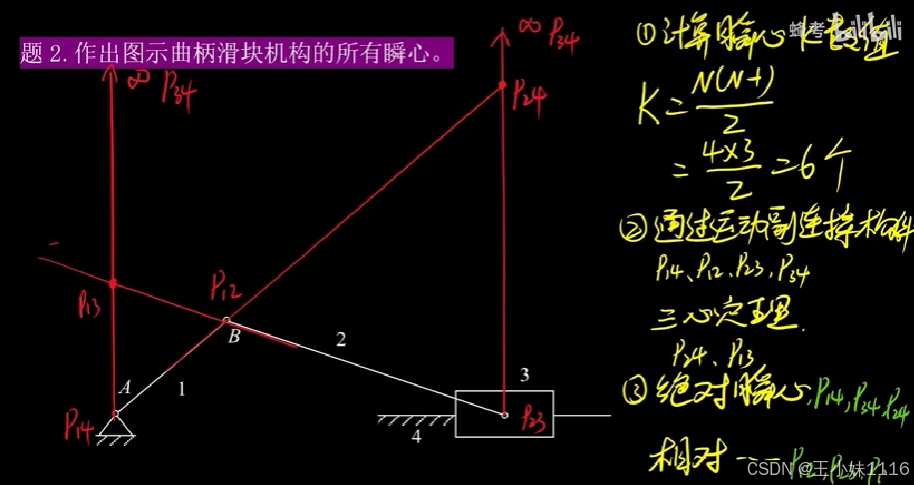
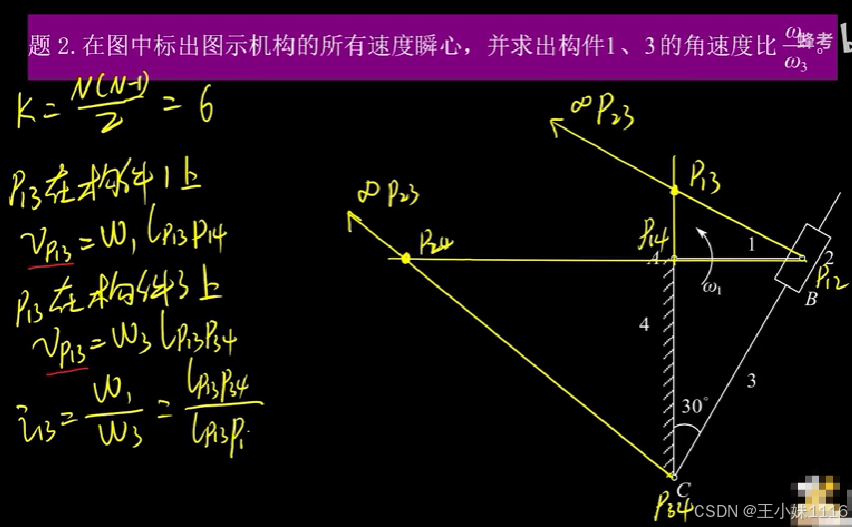
(2)瞬心的数量:每两个构件就有一个瞬心,根据排列组合
瞬心数K与构件数N的关系为:K=N(N-1)/2
2)瞬心的位置
(1)通过运动副连接:按照连接两构件的运动副及其形式可分为四类:
两构件连接方式:转动副-->转动中心处;移动副-->垂直于导轨的无穷远处 纯滚动高副-->接触点处;滚滑高副-->过接触点的公法线上
(2)不通过运动副连接(三心定理)
三个彼此做平面运动的构件的三个瞬心必位于同一直线上,此为三心定理
机架为4,三角并不是机架
6、瞬心图解法作机构的速度分析
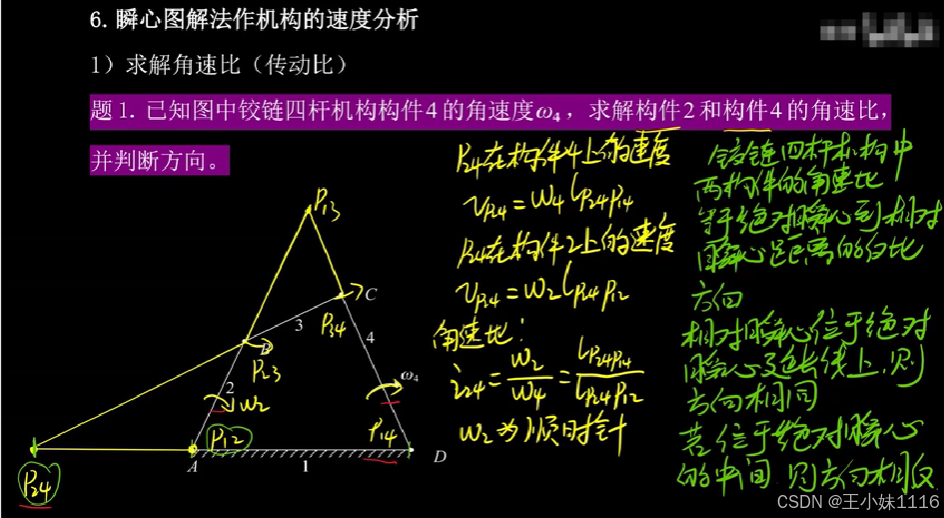
1)求解角速度比(传动比)
铰链四杆机构中,两机构的角速度比=绝对瞬心到相对瞬心距离的反比
运动方向:相对瞬心位于绝对顺心延长线上则方向相同,若位于绝对瞬心的中 间则方向相反
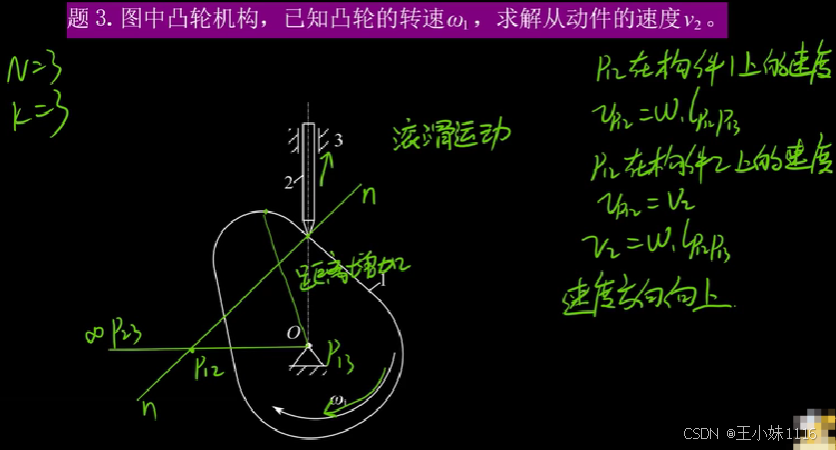
2)求解线速度
构件1和构件2是滚滑高副,瞬心过接触点的公法线上;构件2和我构件3是滑动运动瞬心在垂直线的无穷远处


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









