







 该文探讨了移动机器人在含有障碍物环境中的路径规划问题,使用Matlab进行仿真。通过设置不同障碍物并创建空世界地图,作者展示了如何建立和保存环境模型,并给出了部分代码示例。最终目标是寻找从起点到终点的最优无碰撞路径。
该文探讨了移动机器人在含有障碍物环境中的路径规划问题,使用Matlab进行仿真。通过设置不同障碍物并创建空世界地图,作者展示了如何建立和保存环境模型,并给出了部分代码示例。最终目标是寻找从起点到终点的最优无碰撞路径。
✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
⛄ 内容介绍
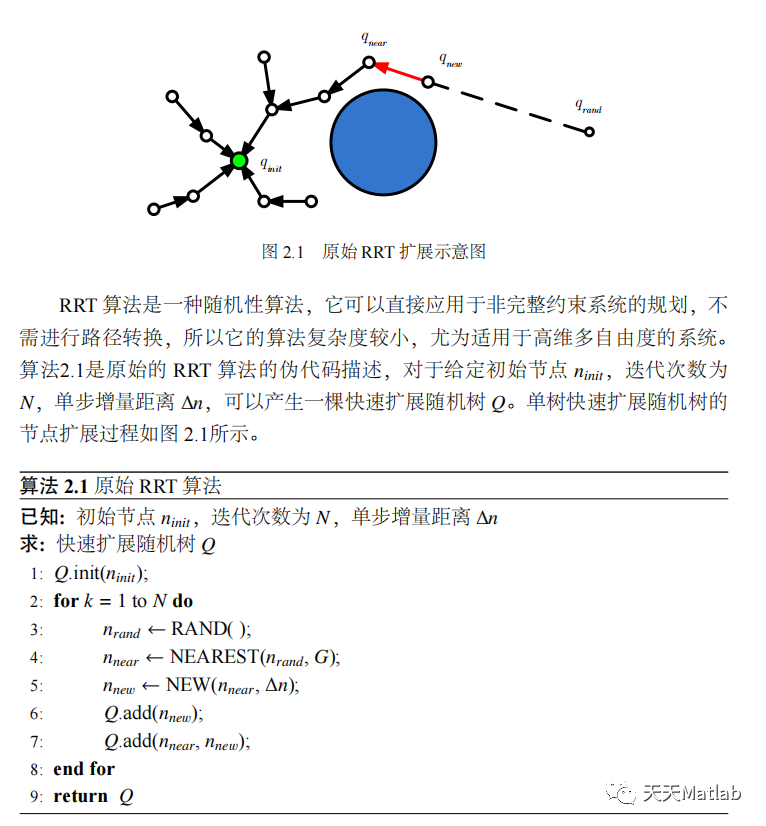
移动机器人运动规划技术是自主移动机器人导航的核心技术之一,而路径规划技术是导航技术研究的一个关键课题。路径规划的任务是:依据一定的评价准则(如距离最短、时间最短、工作代价最小等等),在一个存在障碍物的工作环境内,寻求一条从初始点开始到目标点结束的较优的无碰撞路径。该论文旨在结合实际环境对自主移动机器人的路径规划进行研究和设计实现。
![]() 编辑
编辑
⛄ 部分代码
y = 5;
x = 12;
world_offset_x = 150/y;
world_offset_y = 250/y;
empty_world = ones(int32(world_offset_x),int32(world_offset_y));
% obstacle 1
for i = int32(world_offset_x*0.25):int32(world_offset_x*0.32)
for j = int32(world_offset_y*0.2):int32(world_offset_y*0.27)
empty_world(i,j) = 0;
end
end
% obstacle 2
for i = int32(world_offset_x*0.3):int32(world_offset_x*0.4)
for j = int32(world_offset_y*0.35):int32(world_offset_y*0.45)
empty_world(i,j) = 0;
end
end
% obstacle 3
for i = int32(world_offset_x*0.25):int32(world_offset_x*0.45)
for j = int32(world_offset_y*0.55):int32(world_offset_y*0.65)
empty_world(i,j) = 0;
end
end
% obstacle 4
for i = int32(world_offset_x*0.57):int32(world_offset_x*0.78)
for j = int32(world_offset_y*0.58):int32(world_offset_y*0.65)
empty_world(i,j) = 0;
end
end
% obstacle 5
for i = int32(world_offset_x*0.25):int32(world_offset_x*0.78)
for j = int32(world_offset_y*0.75):int32(world_offset_y*0.82)
empty_world(i,j) = 0;
end
end
save environment
imshow(empty_world)
axis on
grid on
grid minor
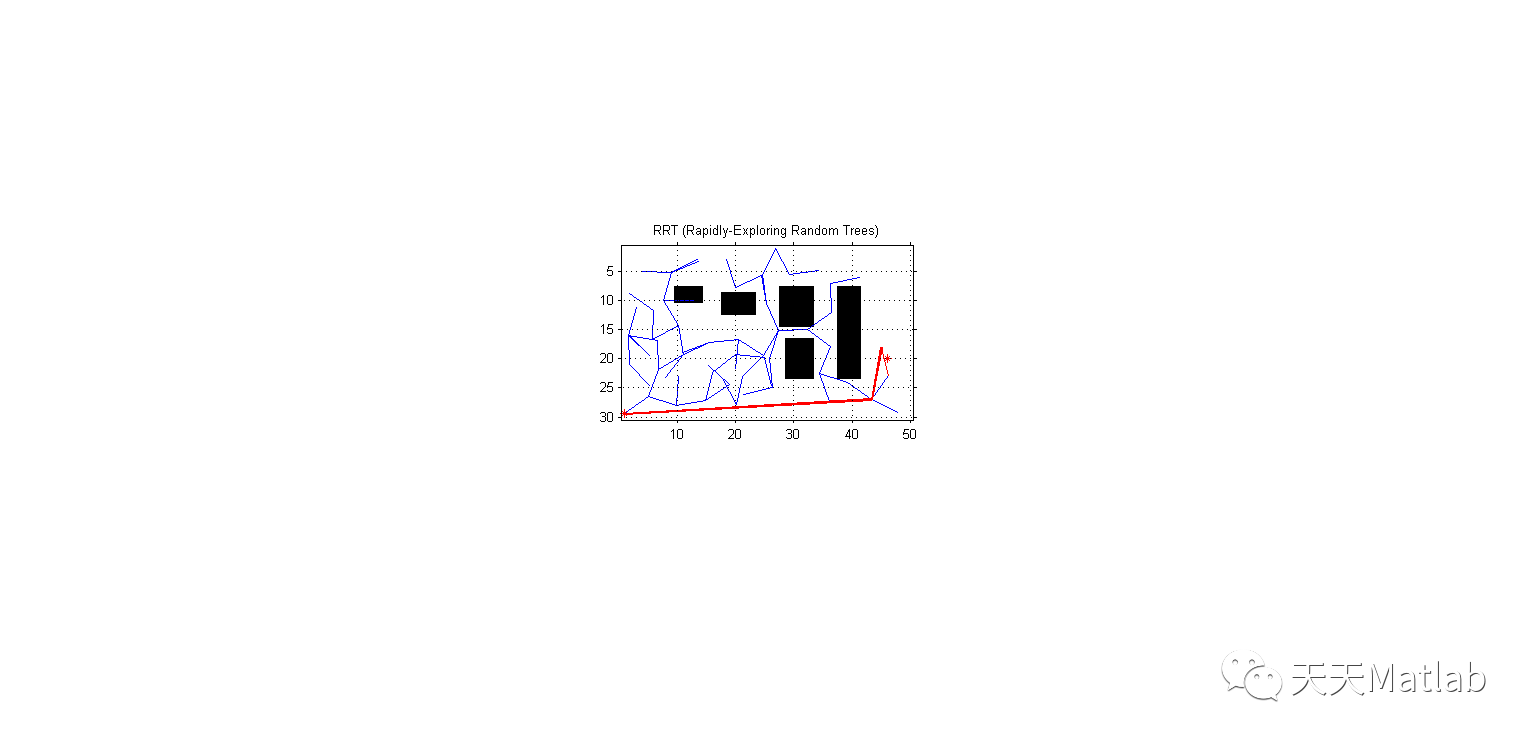
⛄ 运行结果
⛄ 参考文献
[1] 崔鼎, 郝南海, 郭阳宽. 基于RRT*改进的路径规划算法[J]. 机床与液压, 2020(9).
[2] 冯楠. 自主移动机器人路径规划的RRT算法研究[D]. 大连理工大学.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









