






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
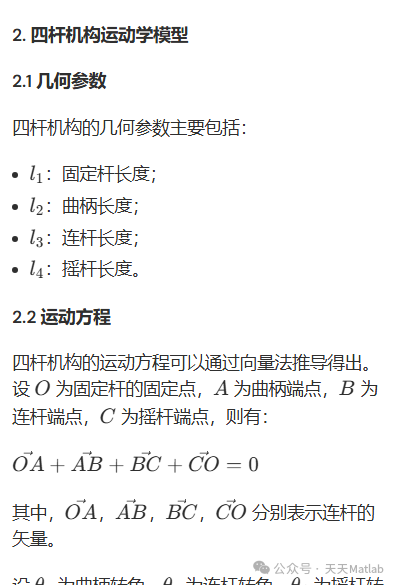
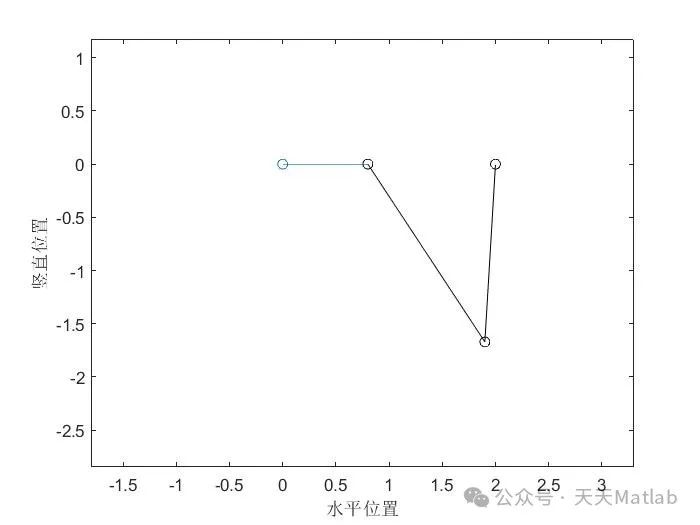
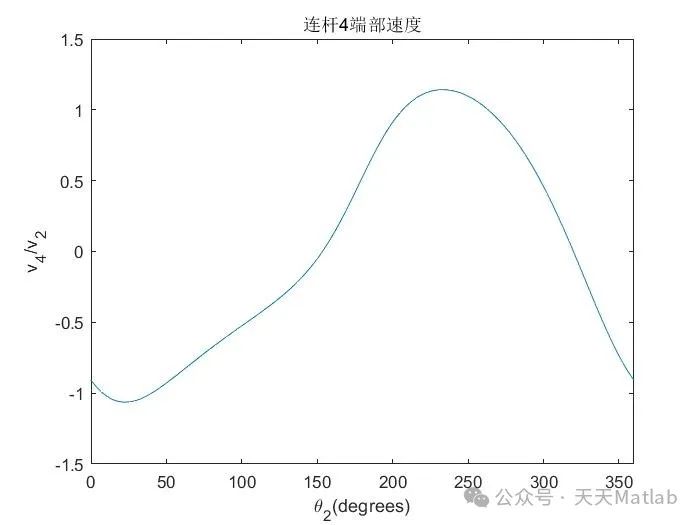
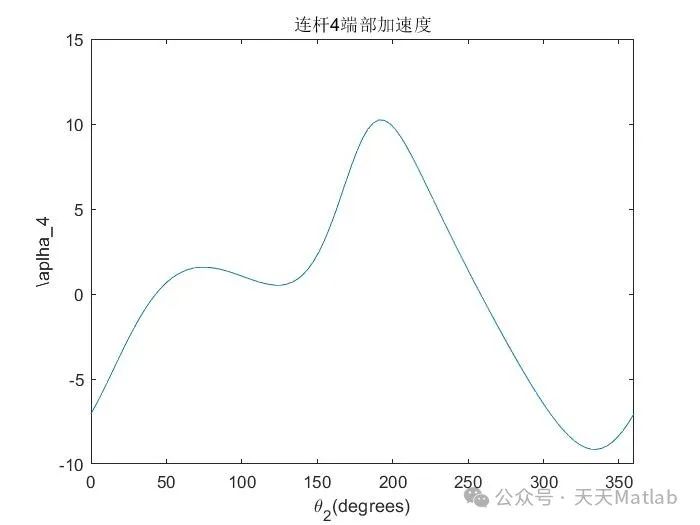
四杆机构作为一种常见的机械机构,在工业领域有着广泛的应用。本文利用MATLAB软件对四杆机构进行运动仿真,并分析其运动特性。首先介绍了四杆机构的运动学模型,建立了机构的运动方程。然后,利用MATLAB编程实现了机构的运动仿真,并通过动画形式展示了机构的运动过程。最后,根据仿真结果,分析了连杆4端部的速度和加速度,并探讨了影响连杆4运动速度和加速度的因素。
1. 绪论
四杆机构是由四个刚性构件组成的闭环机构,其中至少有一个构件固定不动,其他构件通过铰链连接,构成可运动的机构。四杆机构具有结构简单、运动灵活、易于实现等特点,在机械传动、自动化控制、机器人设计等领域有着广泛的应用。
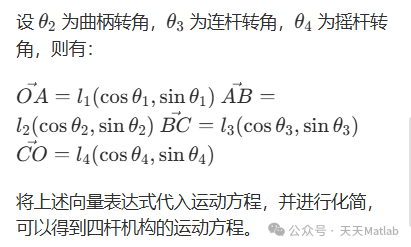
3. 影响因素
影响连杆4端部速度和加速度的因素主要包括:
-
曲柄角速度:曲柄角速度越大,连杆4端部的速度和加速度也越大。
-
机构参数:机构参数(如连杆长度)的变化会影响连杆4的运动轨迹,从而影响其速度和加速度。
-
运动状态:机构处于不同的运动状态(如启动、匀速、减速)时,连杆4的速度和加速度也会不同。
4. 结论
本文利用MATLAB软件对四杆机构进行了运动仿真,并分析了连杆4端部的速度和加速度。仿真结果表明,连杆4端部的速度和加速度受曲柄角速度、机构参数、运动状态等因素的影响。通过对这些因素的分析,可以更好地理解四杆机构的运动特性,为机构设计和优化提供参考。
5. 未来展望
未来可以进一步研究四杆机构的动力学模型,考虑机构的质量、惯性力等因素,对机构进行更全面的分析。此外,还可以将四杆机构与其他机构进行组合,研究更复杂的机械系统。
⛳️ 运行结果
📣 部分代码
sAED(obj)%% Input Parameters :% obj: HyperparametersAED%% Return Parameters :% defaultStruct: a struct containing the default values for the% hyperparameters%% Description :% The default values for the hyperparameters of the AutoencoderDeep are% defined. The struct of hyperparameters is created and the default values% are assigned to it. The created struct is assigned as the hyperparameter% struct of the passed object.%% Author :% Anika Terbuch%% History :% \change{1.0}{14-Jan-2022}{Original}% \change{2.0}{09-Feb-2022}%% --------------------------------------------------% (c) 2022, Anika Terbuch% Chair of Automation, University of Leoben, Austria% email: automation@unileoben.ac.at% url: automation.unileoben.ac.at% --------------------------------------------------%%%% Struct which contains the default hyperparametersdefaultStruct=struct();%% define the default values% number of neurons in the layers of the encoderdefaultNeuronsEncoder=[50,20];% number of neurons in the layers of the decoderdefaultNeuronsDecoder=[30];% dimension of the latent spacedefaultLatentDim=2;% number of epochs (runs through the training set) during trainingdefaultNumberEpoch=10;% number of features passed to the network -> automatically adjusted when% the training data is passed to the network when calling the training% function trainAED()defaultNumberFeature=1;% initial learning rate used for the training with the adamupdate% (adaptive momentum estimation - adaptive learning rate)defaultLearningRate=0.05;% size of a mini-batch during training - number of samples which is passed% through the network before a gradient step is donedefaultMiniBatchSize=15;% environment on which the learning is executed - auto - it is checked if% hardware for gpu-learning is available if not the learning is executed on% the cpudefaultExecutionenvirionment='auto';% which types of layers are used in the encoderdefaultLayersEncoder={'FC','LSTM'};% which types of layers are used in the decoderdefaultLayersDecoder={'LSTM'};% type of latent spacedefaultAutoencoderType='VAE';% output transfer function - function which is applied on the outputs of% the decoderdefaultOutputTransferFunction='none';% conditional hyperparameter - only added to the struct when the% AutoencoderType=='VAE'% lambda - weigthing of the Kullback-Leibler-term of the cost function of% the variatonal autoencoderdefaultWeightingKL=1;% create the fields of the struct and assign the pre-defined default% valuesdefaultStruct.AutoencoderType=defaultAutoencoderType;defaultStruct.LayersEncoder=defaultLayersEncoder;defaultStruct.LayersDecoder=defaultLayersDecoder;defaultStruct.NeuronsEncoder=defaultNeuronsEncoder;defaultStruct.NeuronsDecoder=defaultNeuronsDecoder;defaultStruct.LatentDim=defaultLatentDim;
🔗 参考文献
[1] 王华杰,张军.含连杆摇杆运动副间隙四杆机构动力学仿真研究[J].襄樊学院学报, 2006.DOI:JournalArticle/5ae9becec095d713d895ed37.
[2] 王华杰,张军.含连杆摇杆运动副间隙四杆机构动力学仿真研究[J].襄樊学院学报, 2006, 27(5):3.DOI:JournalArticle/5ae9becec095d713d895ed37.
🎈 部分理论引用网络文献,若有侵权联系博主删除
👇 关注我领取海量matlab电子书和数学建模资料
🎁 私信完整代码和数据获取及论文数模仿真定制🌈
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类















 1010
1010

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









