







CMake 中项目和目标,与 Visual Studio 中是不一样的,CMake 项目 相当于 Visual Studio 解决方案,而 CMake 目标 相当于 Visual Studio 一个一个的不同类型的项目。
我们非常关心解决方案的属性和项目的属性,包括 名称、版本、语言、路径、描述和网站。
CMake 中可以使用多次 project 命令,在这种情况会是什么样的情况?
如果在同一个 CMakeLists.txt 存在 project 命令,以最后一个 project 命令为主,会覆盖前面的命令。
如果用 add_subdirectory 命令,在子目录的 CMakeLists.txt 文件中,也有 project 命令,那么构建后,都会生成项目。
最好一个项目只只创建一个解决方案,除非一次性创建多个解决方案。
注意:如果创建多个解决方案,那么需要多个
CMakeLists.txt文件,需要在多个子目录中创建CMakeLists.txt文件。每个CMakeLists.txt文件中的目标,只会添加到当前的解决方案中。
1. CMake 工具:路径和版本
CMake 路径
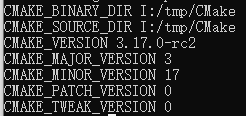
CMAKE_SOURCE_DIR 为 顶级 CMakeLists.txt 文件所在路径,CMAKE_BINARY_DIR 为 构建输出所在路径,这两个变量与子目录中的 CMakeLists.txt 文件无关。
cmake_minimum_required(VERSION 3.0.0)
message("CMAKE_BINARY_DIR ${CMAKE_BINARY_DIR}")
message("CMAKE_SOURCE_DIR ${CMAKE_SOURCE_DIR}")

CMake 版本
CMAKE_VERSION 为 CMake 的版本,由 MAJOR.MINOR.PATCH.TWEAK 组成。CMAKE_MAJOR_VERSION 为 主要版本, CMAKE_MINOR_VERSION 为 次要版本, CMAKE_PATCH_VERSION 为 补丁版本, CMAKE_TWEAK_VERSION 为微调版本。
cmake_minimum_required(VERSION 3.0.0)
message("CMAKE_VERSION ${CMAKE_VERSION}")
message("CMAKE_MAJOR_VERSION ${CMAKE_MAJOR_VERSION}")
message("CMAKE_MINOR_VERSION ${CMAKE_MINOR_VERSION}")
message("CMAKE_PATCH_VERSION ${CMAKE_PATCH_VERSION}")
message("CMAKE_TWEAK_VERSION ${CMAKE_TWEAK_VERSION}")
当前执行 CMakeLists.txt 文件
CMAKE_* 与 CMAKE_CURRENT_* 区别在于,CMAKE_* 表示顶级 CMakeLists.txt 文件,CMAKE_CRRUENT_* 表示当前 CMakeLists.txt 文件。
CMAKE_CURRENT_SOURCE_DIR 为当前 CMakeLists.txt 文
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7741
7741

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









