









本文旨在将具身智能和数字孪生中的相关概念进行拆解、分析和对应。
2025.4.26第二次更新,对概念的补充些建议图片。
每周更新五天,一天至少更500字,一个月也是一万字!我的天,我居然能这么高产!
大家记得去原文多多点赞~
一 、具身智能基础概念分析
一、具身智能的基本概念与理论框架
1. 具身智能的定义与核心要素
具身智能(Embodied Intelligence, EI)是指智能体通过物理身体与环境的实时交互,实现感知、决策和行动的能力。其核心思想是“智能源于身体与环境的互动”,而非仅仅依赖于抽象的计算或符号处理。具身智能强调智能体在物理世界中的主动性和适应性,通过多模态感知和动态交互,完成复杂任务。
与之对应的是图灵提出的离身智能,可以视为无显示交互的智能体,对应的大众的数字孪生模型。真正意义上的虚实互控数字孪生为具身智能。在概念上也有诸多相似。
另:翻译成实体化/具象智能是否更为贴切?
核心要素
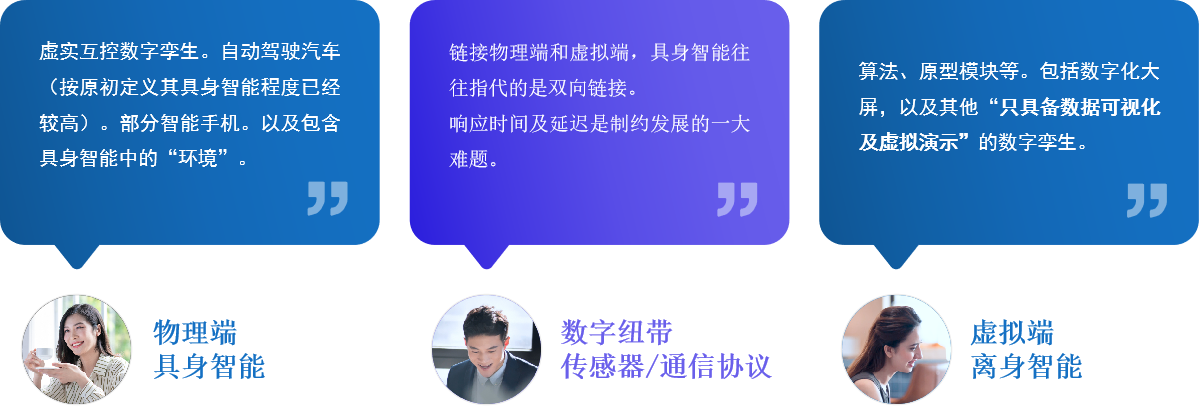
本体(Embodied Body):智能体的物理载体,如机器人、自动驾驶汽车等,具备感知、运动和操作能力。本体的形态和功能直接影响智能体的任务执行能力。
智能体(Embodied Agent):负责感知、理解、决策和控制的核心模块,通常由多模态大模型(如LLM、VLM)驱动。智能体通过整合视觉、语言、触觉等多种模态数据,生成适应环境的行动策略。
环境(Environment):智能体交互的物理世界,包括动态变化的场景和任务目标。环境的复杂性和不确定性要求智能体具备强大的适应能力和实时学习能力。
本体对应的数字孪生中的物理端,智能体对应的是数字端,智能体通过数据纽带链接本体和环境。(即传感器、通信等)。下图中的部分名词在后面“2. 具身智能的理论基础”中有解释。
值得明确的是:
- 具身智能与离身智能并非上下级关系,并不能用来区分智能化程度。
- 真正区分其关系的是(embody)即具象化/实体化/工程应用化。
- 当前阶段离身智能的智能化程度往往更高,因离身智能对于处理器的集成化更高。而具身智能因运动性能、载重、功耗、响应速度等一些列当前不能完全解决的问题,智能化其实更低(举例:“具身”宇树科技的机器人和“离身”ChatGPT/DeepSeek相比,对人、社会的理解在智能化上相差很大)。
2. 具身智能的理论基础
具身智能的理论基础可以追溯到艾伦·图灵在1950年提出的具身图灵测试,旨在评估智能体是否能在物理世界中应对复杂性和不确定性。具身智能的发展受到认知科学、机器人学和人工智能的多重影响,其核心理论包括:具身认知(Embodied Cognition):强调认知过程与身体和环境的紧密耦合,认为智能行为是通过身体与环境的互动涌现的。
形态计算(Morphological Computation):通过智能体的物理形态和结构实现部分计算功能,减少对中央处理单元的依赖,提升系统的效率和适应性。
感知-行动循环(Perception-Action Loop):智能体通过感知环境、生成行动、接收反馈的循环过程,不断优化其行为策略,实现动态适应。
这里提到了图灵,实际上把老祖搬出来最大的意义是换个新词炒概念。
具身认知就是传统的感知。
形态计算中的物理形态和结构实现部分计算功能。可以搜索参考有限元代理模型(本身的理论和大预言蒸馏模型极为相似)。
减少中央处理单元的依赖,提升系统的效率和适应性是传统数字孪生并未追求的点,传统的数字孪生更加讲究集成性。因此对传统处理单元的依赖较大。具身智能在此更加关注于机器人、自动车等需要考虑载重、功耗等应用场景。
感知-行动循环即数字纽带链接的虚实闭环系统。
3. 具身智能与离身智能的区别
离身智能:依赖预定义的数据集和规则,无法直接与环境互动(如ChatGPT)。离身智能通常局限于虚拟环境中的抽象问题解决,缺乏对物理世界的直接感知和操作能力。
具身智能:通过传感器和执行器与环境实时交互,实现动态学习和适应。具身智能体能够在复杂和动态的环境中执行任务,展现出更强的泛化能力和鲁棒性。
以当前的工业水平,是否可以认为“实际上具身智能依然依赖数据集和规则,是基于离身智能的基础上进行物理端应用方式”?。
泛化能力在AI大模型的发展上,如不考虑响应速度,已经有了较大的进步。
但是泛化能力和鲁棒性(耐操性)对于一个系统来说,往往是一个平衡棒的两端,故此往往伴随失彼。
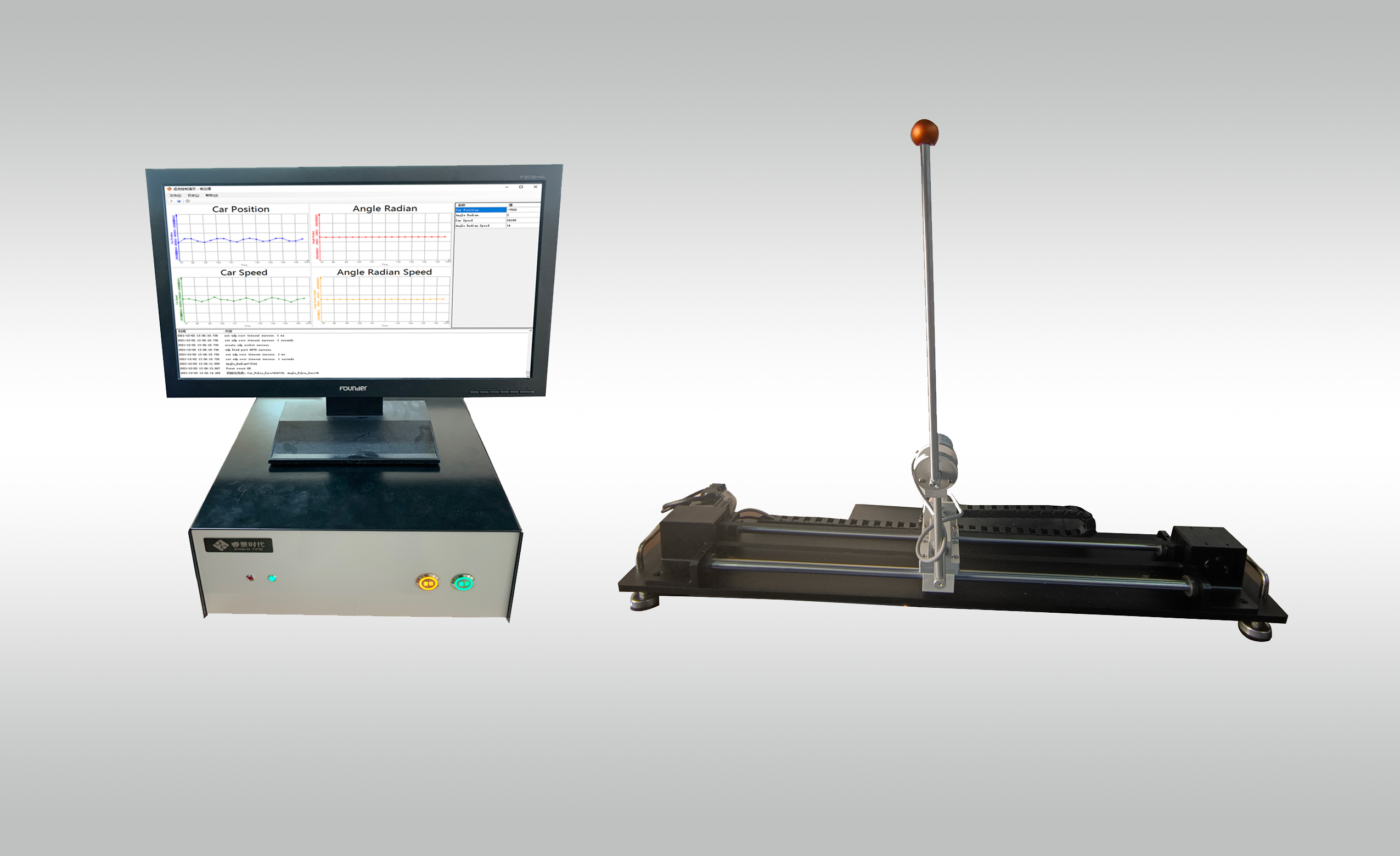
以二阶倒立摆为例,可以说以当前很多二阶倒立摆的鲁棒性已经足够好了。
但是在泛化能力上,对其他稳定性设备的工作的帮助依然很小。
因为在智能化发展当前阶段,提升单个设备的鲁棒性,往往意味着随环境和参数不断地修改算法模型中的参数。总的来说是一种“高科技人才”踩“赛博织布机”的程度。这种特化的鲁棒性,一旦将设备更换,可以说前面调参的工作就要重头开始一遍。
下面是隐藏的例子,有缘人可以看到↓
用一个不太恰当的例子来说,在一个尺寸确定的内裤中,比如XL码。要么丁丁大,要么蛋蛋大,如果两个都大,那内裤肯定装不下,除非有钱换大码。还挺顺口的>_<,然而换大码内裤的工作,意味着整体科技水平迭代,与其期望换代,不如做好当下。
举例结束↑
图片来源
1.2浅显结论
通过简单的分析,我们可以看出:“具身智能”想要实现,还是离不开老一套数字孪生的理念(原初理念,而非市场化曲解的理念)。即物理端的控制和信号采集,数字端的可视化、数据采集分析管理。以及链接两者的数据纽带。
但同时,也要肯定具身智能这一概念。因为做数字孪生的初心,和未来的终极目标就是用虚拟的、离身的、代码的技术,去解决物理的、具身/具象化的、人因的、环境的问题。
1.3名词、概念界限、等级分析(持续更新中,当前深夜写稿,思维有些混乱)
在分析具体项目案例前我们不妨一起分析下名词与概念。(分析问题的前提是能达成共识,本小节尤为重要,敬请大家交流提出宝贵意见,笔者会反复参考修改)。
2.1.1部分名词及其代表技术的的发展历程
(1)电量→能量→健康√(容量X)
当前普通人能享受得到的、同时也是接触最多的具身智能产品,就是自主化水平较高的自动驾驶车辆,一般为至少在L2级以上的车辆。其中大部分又多为新能源汽车,而电池又是新能源汽车发展领域中最重要的一环,人们提出了以下关于电池状态评估的三个技术名词。
SOC,SOE,SOH
分为别为:State of Charge,电量状态。其实也很好理解,就是当前的电量,及占可用电量的百分比。
State of Energy,能量状态。就是大家常说的还剩多少度电,由于SOC的电量预测受车辆(具身智能中的本体)和路况(具身智能中的环境)等影响,评估精准度难以保证,因此加强了另外一种辅助方式,两者往往同时使用。
State of Health,健康状态,从这里开始出现了变化与歧义。指的是当前电池储存电的能力,电池的容量会随着使用时间的增长而下降。可为何不取名为另外一个SOC(State of Capacity)或者SOQ(Quality)呢?
除了在名词缩写容易混淆外,我们同时也应该注意到Health不同与前两个单词,其本身是从医学的学科中发展出来的。其本意更应该对应的是Capacity Life,容量寿命。这既是具身智能发展过程中在名词、概念界限上的变化。
Health指的不再是电量、电压、电流这些看似具体,实际人类无法“直接”感知和理解的参数。
而是人类都有”具体的体会和体验“,但对于算法层面开始确有些抽象的“健康度”。
从以上的分析我们继续推导,在算法和控制层面来说,我们想要一个汽车前进,需要控制电压、电机转速、供电等等等等。但这些都属于”离身智能发展的范畴具身智能想要达到的目的是:人想要汽车前进,汽车要做的是智能的分析人“,

















 4444
4444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









