










 本文详细介绍了如何通过CAD和工程仿真软件对先导型溢流阀进行建模,重点讲解了HCD的传感器模型、控制电路设计和动态集成,以模拟其压力控制功能。
本文详细介绍了如何通过CAD和工程仿真软件对先导型溢流阀进行建模,重点讲解了HCD的传感器模型、控制电路设计和动态集成,以模拟其压力控制功能。
当谈到建模先导型溢流阀(Pilot Operated Relief Valve,PORV)时,需要考虑它们的物理构造和工作原理。以下是一个简单的建模过程:
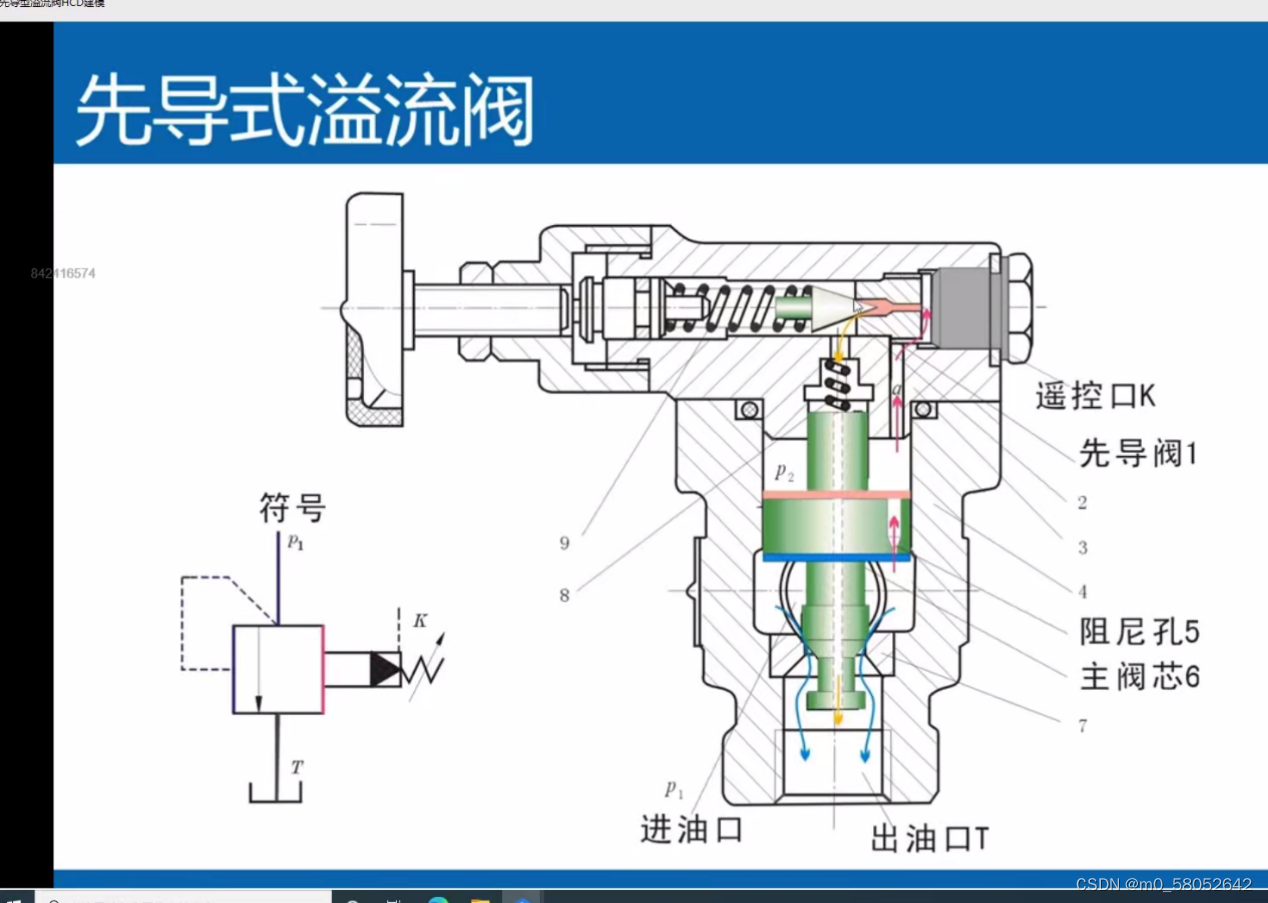
1.了解工作原理: 先导型溢流阀由主阀和控制器组成。控制器通过感应系统监测压力变化,以控制主阀的开启和关闭。主阀在受到控制器信号时打开或关闭,允许流体通过或将其排放到低压区域。
2.选择建模工具: 使用适当的建模工具,如计算机辅助设计(CAD)软件或者工程仿真软件,比如MATLAB/Simulink、ANSYS等。
3.建立几何模型: 使用CAD软件创建先导型溢流阀的三维几何模型。这包括主阀、控制器、传感器等组件的几何形状和尺寸。
4.确定材料属性: 为模型中的各部件指定材料属性,如弹性模量、密度、热传导系数等。
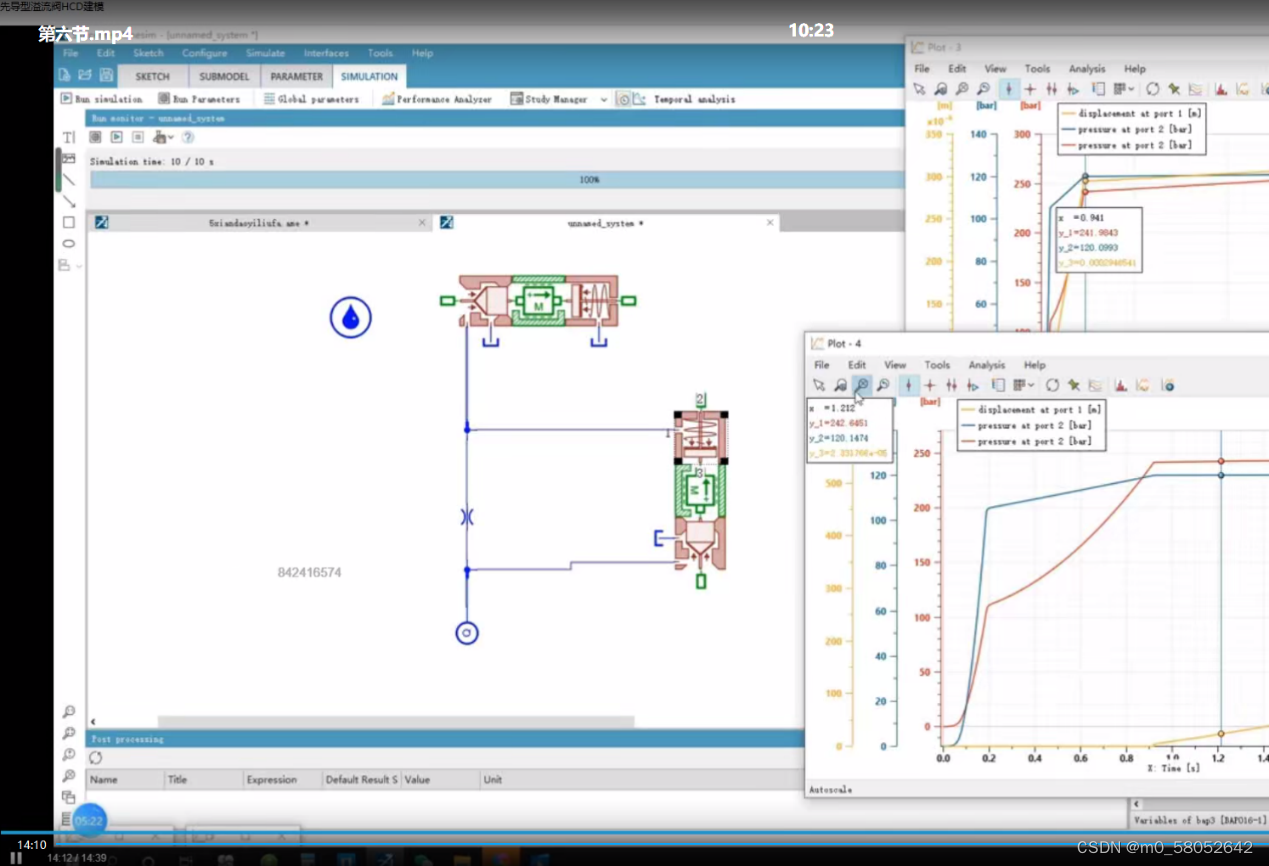
5.设置模拟参数: 设置仿真参数,如模拟时间步长、精度等。对于控制器部分,可能需要考虑PID控制器或其他控制算法的参数设置。
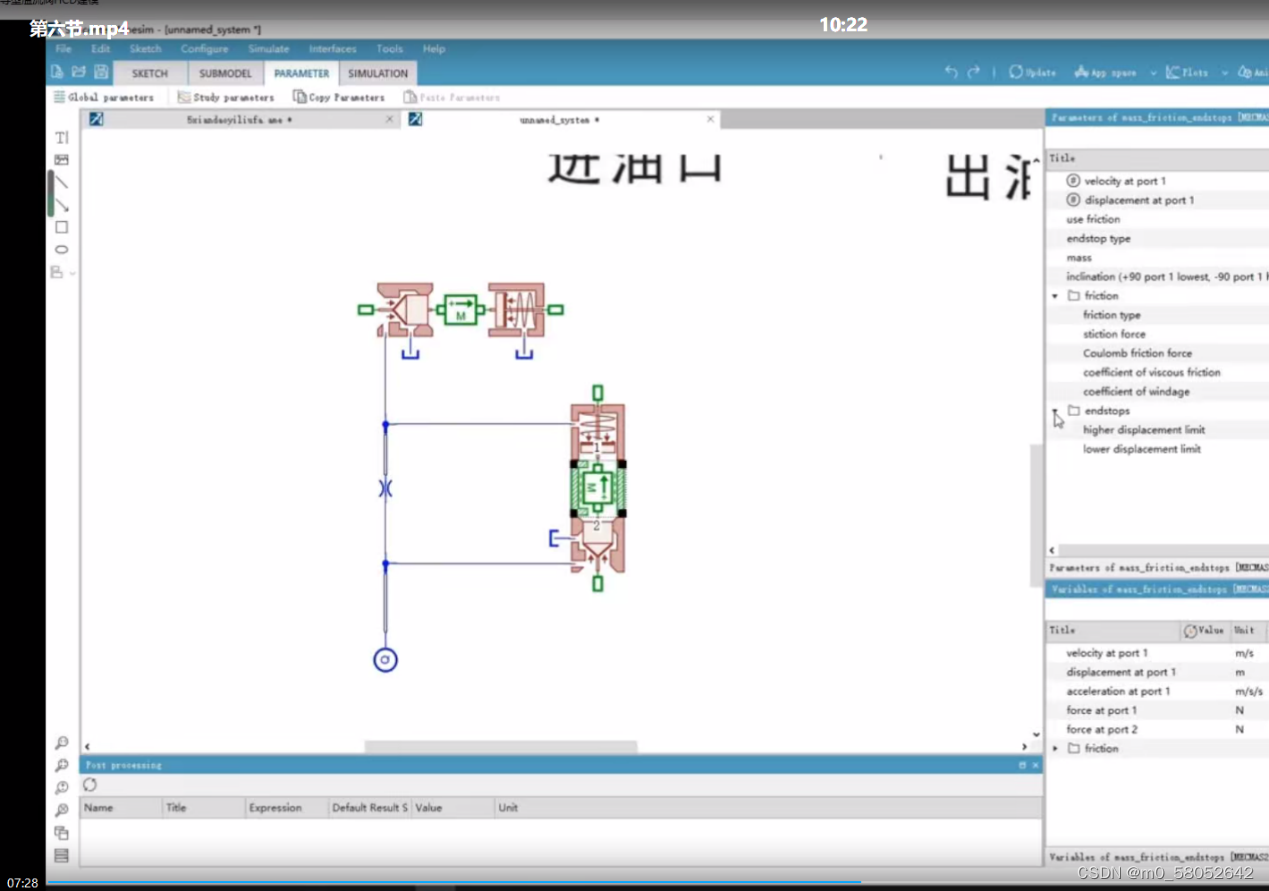
先导型溢流阀(Pilot Operated Relief Valve,PORV)中的HCD(Hydraulic Control Device)是其控制系统的关键部分,负责监测压力并控制主阀的开启和关闭。要对HCD进行建模,需要考虑以下步骤:
1.建立传感器模型: 基于感应元件的类型(比如压力传感器),建立相应的传感器模型。考虑传感器的灵敏度、响应时间等特性,并将其集成到控制系统模型中。
2.设计控制电路模型: 考虑使用适当的控制算法(如PID控制器),建立控制电路的数学模型。这将涉及控制器的输入(传感器输出)和输出(控制主阀)之间的关系。
3.定义系统输入和输出: 确定模型的输入,如系统的压力变化,以及输出,即主阀的开合状态。
4.建立动态模型: 将传感器、控制电路和执行元件集成到一个动态模型中。这个模型能够描述HCD如何根据感知到的压力信号来控制主阀的动作。
希望这篇内容能对您有所帮助。欢迎留言分享您的想法和关注我们获取更多精彩内容!关注我私信HCD6,发教学视频资源。



















 3664
3664

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











