






1、直方图均衡化(HE)
英文:Histogram Equalization
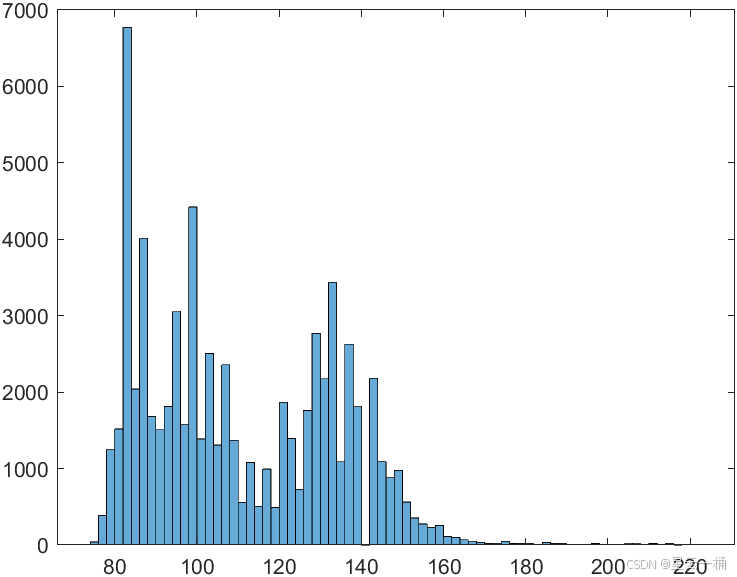
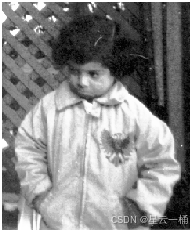
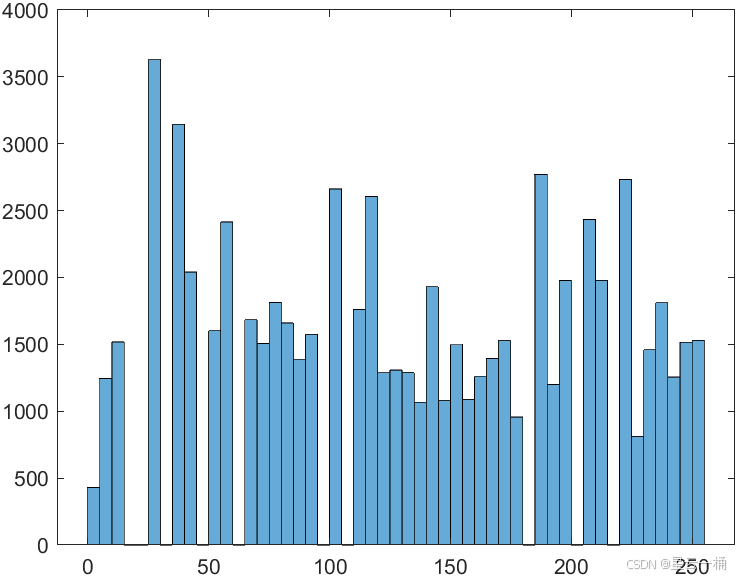
原因:灰度直方图不够舒展,集中在了一个小区域.
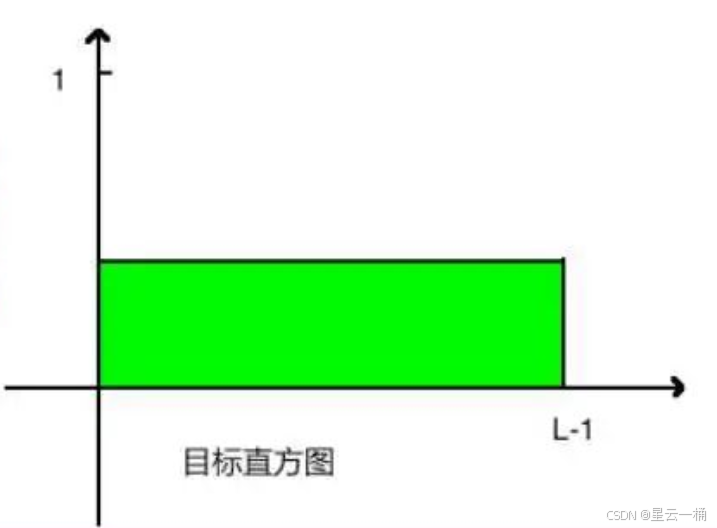
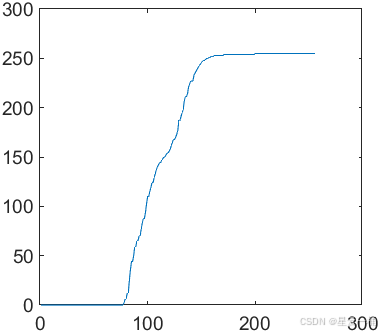
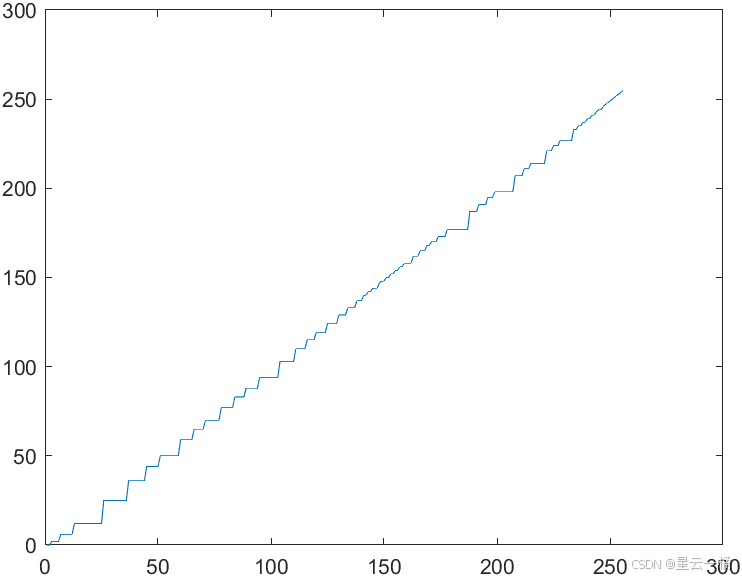
方法:找到一个函数映射,使直方图均衡,能在显示范围内均衡显示。而累加直方图正好满足这个映射条件。
原图及其直方图、累加直方图:
直方图均衡化后的图像及其直方图、累加直方图
2、限制对比度自适应直方图均衡化(CLAHE)
英文:Contrast Limited Adaptive Histogram Equalization
原因:
如果一个图片中有大块的暗区或者亮区的话,普通直方图算法(HE)效果非常不好。
1、对于灰度非常集中的区域,直方图会被拉的非常稀疏,从而导致对比度增强过大,成为噪音;
2、整体直方图后,一些小色块区域被压缩合并到一块,调整后丢失细节。
下面是一个例子,发现经过HE之后的图片出现了大量噪点:
方法:
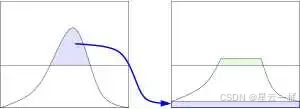
1、针对第一个问题,提出了CLHE,加入对比度限制,其实原理很简单,设置直方图分布的阈值,将超过该阈值的分布“均匀”分散至概率密度分布上,由此来限制转换函数(累计直方图)的增幅。
2、对于第二个问题,自适应直方图均衡化(Adaptive HE)的基本思想是将原始图片划分成子区域,然后对每个子区域进行直方图变换。当然,这样做的问题应该是显而易见的:每一块区域之间都会有非常大的不连续。如下:
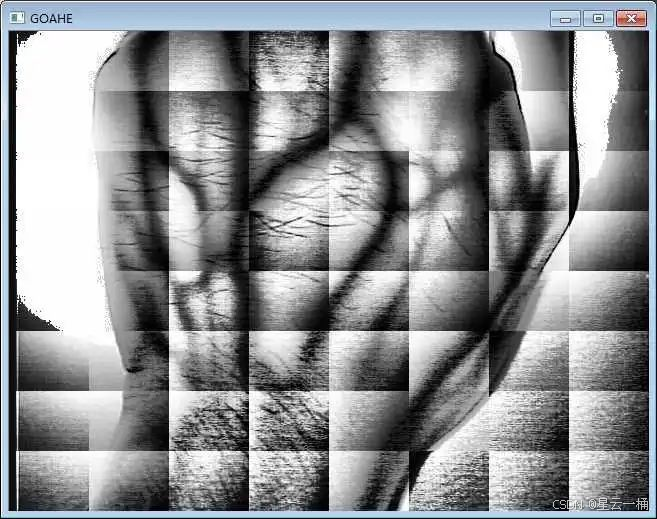
因此为了解决这个问题,提出了优化方案双线性插值的AHE,
PS:
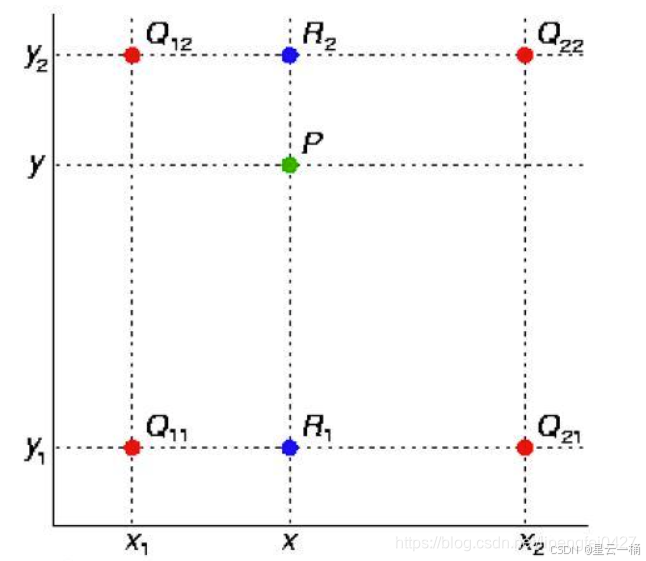
双线性插值是一种用于二维空间的插值方法,它通过对四个相邻像素点的加权平均来计算目标点的值,从而实现平滑的过渡。
3、综合以上两点,分块+截断,就变成了我们现在的CLAHE算法。
这样的话,直方图就不会出现概率密度函数过大的区域,从而避免了某些集中区域被拉得过于系数,也能保留一些小色块细节。
我这里配合 GPT简单写了代码,但这个代码没有考虑边缘和角落的情况,但用来理解原理是没什么问题的。
function output = myCLAHE_optimized(img, tileSize, clipLimit, numBins)
% 转换为灰度图像并转为单精度
if size(img, 3) == 3
img = rgb2gray(img);
end
img = single(img); % 使用单精度节省内存
[imgHeight, imgWidth] = size(img);
% 计算分块数量(不扩展图像)
numTilesX = ceil(imgWidth / tileSize(2));
numTilesY = ceil(imgHeight / tileSize(1));
% 预分配三维矩阵存储映射表
maps = zeros(numTilesY, numTilesX, numBins, 'single');
% 处理每个tile的直方图
for i = 1:numTilesY
for j = 1:numTilesX
% 计算 tile 边界
xStart = max(1, (j-1)*tileSize(2) + 1);
xEnd = min(imgWidth, j*tileSize(2));
yStart = max(1, (i-1)*tileSize(1) + 1);
yEnd = min(imgHeight, i*tileSize(1));
tile = img(yStart:yEnd, xStart:xEnd);
% 计算直方图并应用 CLAHE
h = imhist(uint8(tile), numBins); % imhist 需要 uint8 输入
avg = numel(tile) / numBins;
clipVal = avg * clipLimit;
% 直方图裁剪
excess = sum(max(h - clipVal, 0));
hClipped = min(h, clipVal) + excess / numBins;
% 计算 CDF 并生成映射
cdf = cumsum(hClipped);
if cdf(end) == 0
map = single(0:numBins-1)';
else
map = single(round((cdf / cdf(end)) * (numBins - 1)));
end
maps(i,j,:) = map;
end
end
% 预计算 x 和 y 方向的 tile 索引及插值权重
xCoords = (1:imgWidth);
yCoords = (1:imgHeight);
tx = (xCoords - 1) / tileSize(2);
ty = (yCoords - 1) / tileSize(1);
x1 = floor(tx);
y1 = floor(ty);
x1 = max(0, min(numTilesX-1, x1));
y1 = max(0, min(numTilesY-1, y1));
x2 = min(x1 + 1, numTilesX-1);
y2 = min(y1 + 1, numTilesY-1);
dx = tx - x1;
dy = ty - y1;
% 转换为1-based索引
x1 = uint32(x1 + 1);
y1 = uint32(y1 + 1);
x2 = uint32(x2 + 1);
y2 = uint32(y2 + 1);
% 将灰度值映射到 bin 索引(1~numBins)
binIdx = uint8(floor(img / 255 * (numBins-1)) + 1); % uint8 索引
% 预分配输出
output = single(zeros(imgHeight, imgWidth));
% 遍历图像并应用插值
for i = 1:imgHeight
yi1 = y1(i);
yi2 = y2(i);
dy1 = 1 - dy(i);
dy2 = dy(i);
for j = 1:imgWidth
xi1 = x1(j);
xi2 = x2(j);
dx1 = 1 - dx(j);
dx2 = dx(j);
% 提取四个相邻 tile 的映射值
map11 = maps(yi1, xi1, binIdx(i,j));
map12 = maps(yi1, xi2, binIdx(i,j));
map21 = maps(yi2, xi1, binIdx(i,j));
map22 = maps(yi2, xi2, binIdx(i,j));
% 插值计算
output(i,j) = dy1 * (dx1 * map11 + dx2 * map12) + ...
dy2 * (dx1 * map21 + dx2 * map22);
end
end
% 转换为 uint8 输出
output = uint8(output);
end
% 读取图像
img = imread('pout.tif');
% 设置参数
tileSize = [60 60]; % Tile尺寸
clipLimit =200; % 对比度限制参数
numBins = 256; % 直方图bin数量
% 应用CLAHE
enhancedImg = myCLAHE_optimized(img, tileSize, clipLimit, numBins);
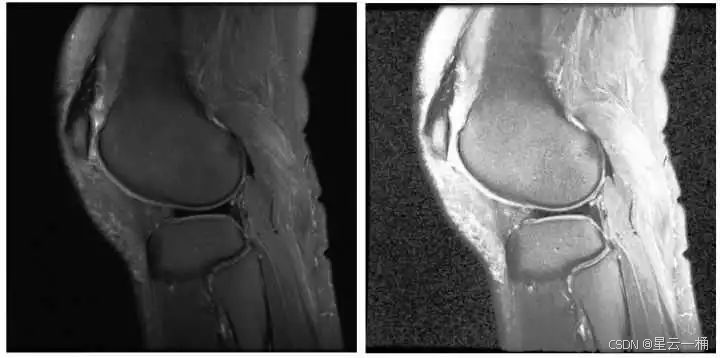
% 显示结果
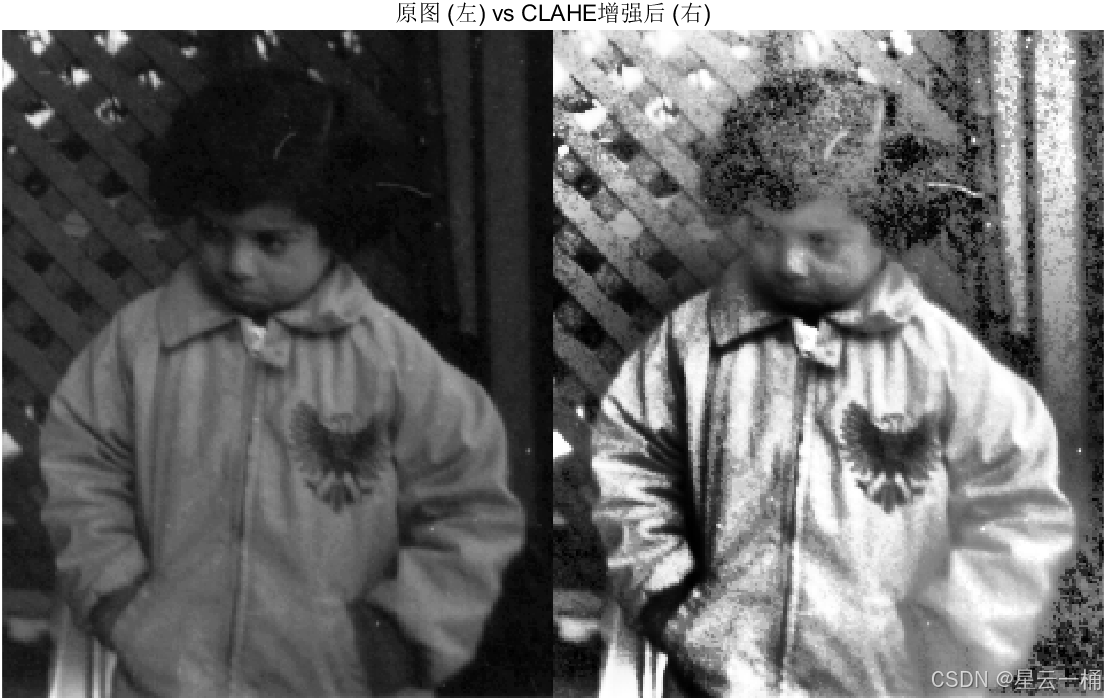
imshowpair(img, enhancedImg, 'montage');
title('原图 (左) vs CLAHE增强后 (右)');
正确完善的应该区分边缘和角落,完成以下部分:
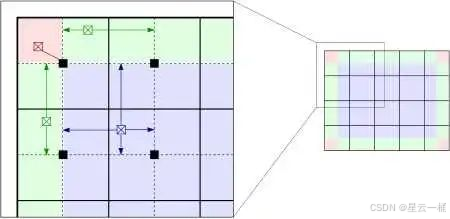
【使用双线性插值的方案】
将图像分为多个矩形块大小,对于每个矩形块子图,分别计算其灰度直方图和对应的变换函数(累积直方图)
将原始图像中的像素按照分布分为三种情况处理:
红色区域中的像素按照其所在子图的变换函数进行灰度映射
绿色区域中的像素按照所在的两个相邻子图变换函数变换后进行线性插值得到
紫色区域中的像素按照其所在的四个相邻子图变换函数变换后双线性插值得到
参考链接: 直方图均衡化
链接: CLAHE算法实现图像增强

















 4223
4223

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









