




一、功能介绍
小车能够通过蓝牙来控制运行方向,同时它也能够循迹,循迹之后不用蓝牙控制就能够自己行走,当前方有障碍物时,它能够扭头,找到没有障碍物的方向然后再走。
二、硬件模块
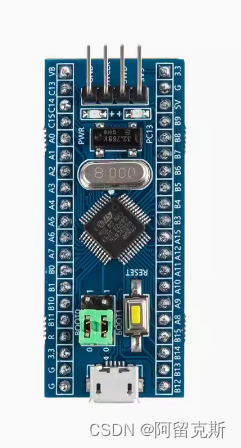
1、stm32f103主控芯片
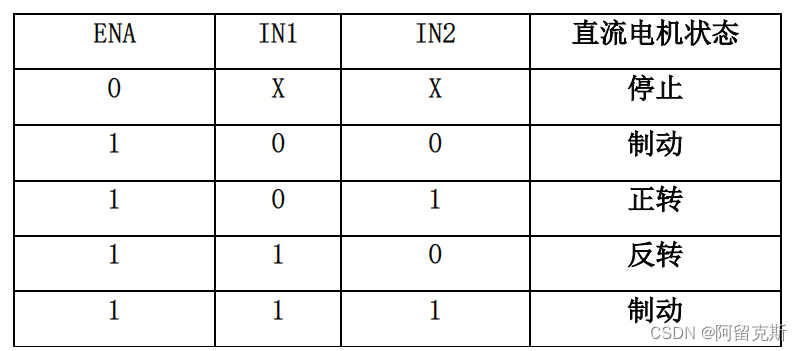
2、L298N驱动电机
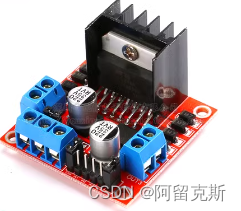
若要对直流电机进行 PWM 调速,需设置 IN1 和 IN2,确定电机的转动方向, 然后对使能端输出 PWM 脉冲,即可实现调速。注意当使能信号为 0 时,电机处于自由停止状态;当使能信号为 1,且 IN1 和 IN2 为 00 或 11 时,电机处于制动状 态,阻止电机转动。
如果要控制小车的速度,则拔开L298N驱动电机的跳线帽,然后使能ENA和ENB引脚。
3、红外循迹模块

TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1494
1494

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









