







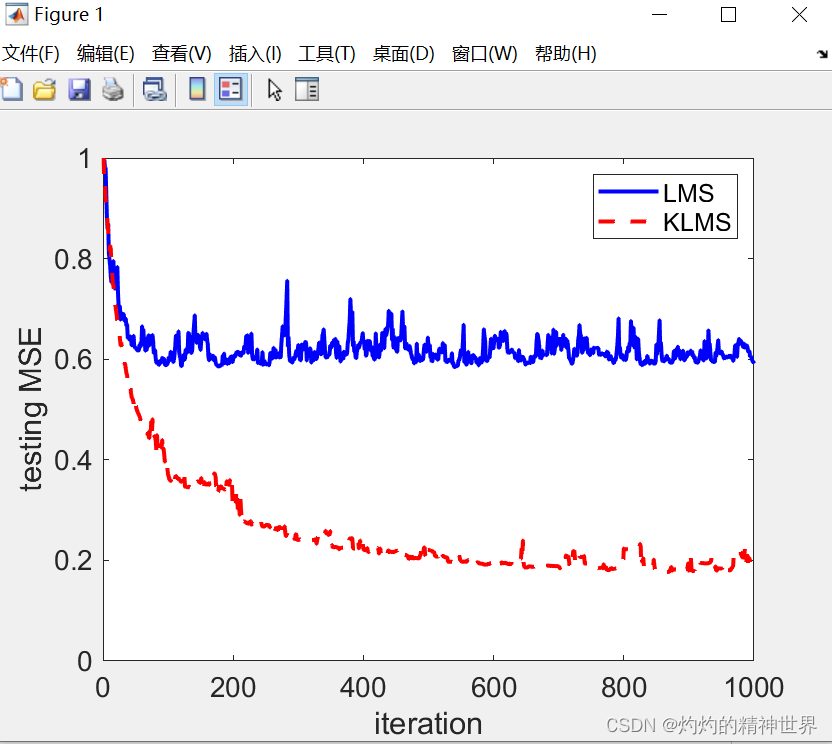
%LMS与KLMS应用于非线性信道均衡的学习曲线
clear all;
close all
clc
TD = 5;%时间嵌入长度
D = 2;%均衡滞后时间
h = 0.1;%高斯核参数
u = randn(1,2500)>0;
u = 2*u-1;% 生成二进制数据
z = u+0.5*[0,u(1:end-1)];% 非线性信道
ns = 0.4*randn(1,length(u));% 信道噪声
y = z - 0.9*z.^2 + ns;% 非线性信道输出
%数据大小
N_tr = 1000;%训练样本
N_te = 1000;%测试样本
%数据嵌入
X = zeros(TD,N_tr);
for k=1:N_tr
X(:,k) = y(k:k+TD-1)';
end
% 测试数据
X_te = zeros(TD,N_te);
for k=1:N_te
X_te(:,k) = y(k+N_tr:k+TD-1+N_tr)';
end
% 期望信号
T = zeros(N_tr,1);
for ii=1:N_tr
T(ii) = u(D+ii);
end
% 测试信号
T_te = zeros(N_te,1);
for ii=1:N_te
T_te(ii) = u(D+ii+N_tr);
end
%初始化
mse_te = zeros(1,N_tr);
mse_te_k = zeros(1,N_tr);
%=========Linear LMS===================
lr = 0.01;%步进参数
w1 = zeros(1,TD);
e_l = zeros(N_tr,1);
for n=1:N_tr
y = w1*X(:,n);
e_l(n) = T(n) - y;
w1 = w1 + lr*e_l(n)*X(:,n)';
%测试
err = T_te'-(w1*X_te);
mse_te(n) = mean(err.^2);
end
%=========Kernel LMS===================
lr_k = 0.2;
%初始化
e_k = zeros(N_tr,1);
y = zeros(N_tr,1);
y_te = zeros(N_te,1);
e_k(1) = T(1);
y(1) = 0;
mse_te_k(1) = mean(T_te.^2);
for n=2:N_tr
%训练
ii = 1:n-1;
y(n) = lr_k*e_k(ii)'*(exp(-sum((X(:,n)*ones(1,n-1)-X(:,ii)).^2)*h))';
e_k(n) = T(n) - y(n);
%测试
y_te = zeros(N_te,1);
for jj = 1:N_te
ii = 1:n;
y_te(jj) = lr_k*e_k(ii)'*(exp(-sum((X_te(:,jj)*ones(1,n)-X(:,ii)).^2)*h))';
end
err = T_te - y_te;
mse_te_k(n) = mean(err.^2);
end
figure
plot(mse_te,'b-','LineWidth',2)
hold on
plot(mse_te_k,'r--','LineWidth',2)
set(gca, 'FontSize', 14);
set(gca, 'FontName', 'Arial');
legend('LMS','KLMS')
xlabel('iteration')
ylabel('testing MSE')
结果如是:
性能比较:
%性能比较
clear all;
close all
clc
TD = 5;%时间嵌入长度
D = 2;%均衡滞后时间
h = 0.1;%高斯核参数
MC = 10;
err_l = zeros(MC,1);
err_k = zeros(MC,1);
err_rbf = zeros(MC,1);
np_v = [0.1, 0.4, 0.8];%标准差赋值
for kkk = 1:length(np_v)
np = np_v(kkk);
disp([num2str(MC), ' Monte Carlo simulations'])
for mc=1:MC
disp(mc)
u = randn(1,6500)>0.5;
u = 2*u-1;% 生成二进制数据
z = u+0.5*[0,u(1:end-1)];% 非线性信道
ns = np*randn(1,length(u)); % 信道噪声
y = z - 0.9*z.^2 + ns;% 非线性信道输出
%数据大小
N_tr = 1000;
N_te = 5000;
%数据嵌入
X = zeros(TD,N_tr);
for k=1:N_tr
X(:,k) = y(k:k+TD-1)';
end
% 测试数据
X_te = zeros(TD,N_te);
for k=1:N_te
X_te(:,k) = y(k+N_tr:k+TD-1+N_tr)';
end
% 期望信号
T = zeros(N_tr,1);
for ii=1:N_tr
T(ii) = u(D+ii);
end
T_te = zeros(N_te,1);
for ii=1:N_te
T_te(ii) = u(D+ii+N_tr);
end
%=========Linear LMS===================
lr = 0.005;%步进参数
w1 = zeros(1,TD);
e_l = zeros(N_tr,1);
b_l = 0;
for n=1:N_tr
y = w1*X(:,n) + b_l;
e_l(n) = T(n) - y;
w1 = w1 + lr*e_l(n)*X(:,n)';
b_l = b_l + lr*e_l(n);
end
%测试
uhat = 2*(w1*X_te + b_l>0)-1;
err_l(mc) = length(find(T_te'-uhat))/N_te;
%=========Kernel LMS===================
lr_k = 0.1;%步进参数
%初始化
e_k = zeros(N_tr,1);
b_k = 0;
y = zeros(N_tr,1);
e_k(1) = T(1);
y(1) = 0;
for n=2:N_tr
%训练
ii = 1:n-1;
y(n) = lr_k*e_k(ii)'*(exp(-sum((X(:,n)*ones(1,n-1)-X(:,ii)).^2)*h))'+b_k;
e_k(n) = T(n) - y(n);
b_k = b_k + lr_k*e_k(n);
end
%测试
y_te = zeros(N_te,1);
for jj = 1:N_te
ii = 1:n;
y_te(jj) = lr_k*e_k(ii)'*(exp(-sum((X_te(:,jj)*ones(1,n)-X(:,ii)).^2)*h))'+b_k;
end
uhat = 2*(y_te>0)-1;
err_k(mc) = length(find(T_te - uhat))/N_te;
%========RN===================
lam = 1;
G = zeros(N_tr,N_tr);
for i=1:N_tr-1
j=i+1:N_tr;
G(i,j)=exp(-sum((X(:,i)*ones(1,N_tr-i)-X(:,j)).^2)*h);
G(j,i)=G(i,j)';
end
G = G + eye(N_tr);
G_lam =G + lam*eye(N_tr);
a = inv(G_lam)*T;
%testing
for jj = 1:N_te
y_te(jj) = a'*(exp(-sum((X_te(:,jj)*ones(1,N_tr)-X).^2)*h))';
end
uhat = 2*(y_te>0)-1;
err_rbf(mc) = length(find(T_te - uhat))/N_te;
end
disp('========================================')
disp(['noise deviation = ',num2str(np)])
disp('<<LMS')
disp([num2str(mean(err_l)),'+/-',num2str(std(err_l))])
disp('<<KLMS')
disp([num2str(mean(err_k)),'+/-',num2str(std(err_k))])
disp('<<RN')
disp([num2str(mean(err_rbf)),'+/-',num2str(std(err_rbf))])
end
















 5245
5245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









