







本文内容基于[野火]《STM32库开发实战指南》(标准库源码),使用开发环境为STM32CubeIde,硬件测试平台为【野火】STM32F407霸天虎V2版本。完整工程见:LEARN: XX
1.IIC通讯协议简介
I2C
通讯协议
(Inter
-
Integrated Circuit)
是由
Phiilps
公司开发的,由于它引脚少,硬件实现简单,
可扩展性强,不需要
USART
、
CAN
等通讯协议的外部收发设备,现在被广泛地使用在系统内多
个集成电路
(IC)
间的通讯。
1.1物理层
物理层通讯方式如下图所示:
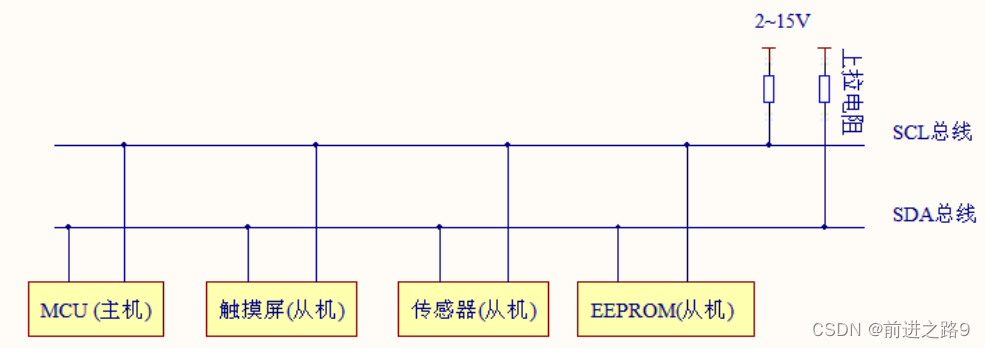
(1)
它是一个支持多设备的总线。“总线”指多个设备共用的信号线。在一个
I2C
通讯总线中,可
连接多个
I2C
通讯设备,支持多个通讯主机及多个通讯从机。
(2)
一个
I2C
总线只使用两条总线线路,一条双向串行数据线
(SDA)
,一条串行时钟线
(SCL)
。数
据线即用来表示数据,时钟线用于数据收发同步。
(3)
每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备之间的访
问。
(4)
总线通过上拉电阻接到电源。当
I2C
设备空闲时,会输出高阻态,而当所有设备都空闲,都
输出高阻态时,由上拉电阻把总线拉成高电平。
(5)
多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定由哪个设备占用总线。
(6)
具有三种传输模式:标准模式传输速率为
100kbit/s
,快速模式为
400kbit/s
,高速模式下可达
3.4Mbit/s
,但目前大多
I
2
C
设备尚不支持高速模式。
(7)
连接到相同总线的
IC
数量受到总线的最大电容
400pF
限制。
1.2协议层
I2C
的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环
节。
一个完整IIc通讯数据包格式如下图所示:
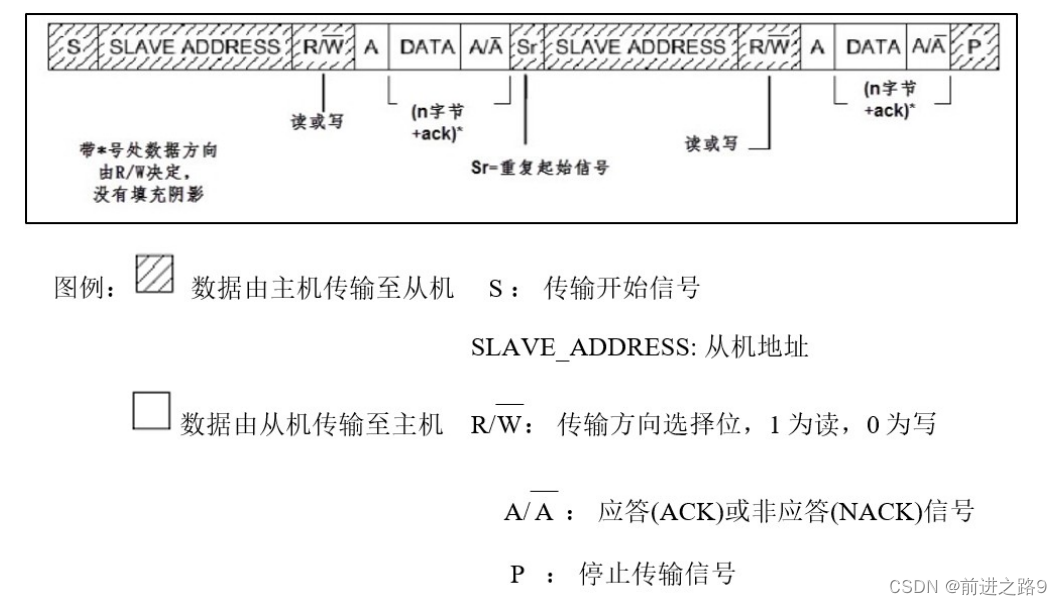
1.首先由主机的 I2C 接口产生的传输起始信号 (S),这时连接到 I2C 总线上的所有从机都会
接收到这个信号,并且开始等待接收主机发送从机地址信号 (SLAVE_ADDRESS)。当主机广播的地址与某个设备地址(设备地址唯一)相同时,这个设备就被选中了,没被选中的设备将会忽略之后的数据信号。根据 I2C 协议,这个从机地址可以是7 位或 10 位。
2.在地址位后为读写位:0表示
主机向从机写数据,1表示主机由从机读数据
3.从机接收到匹配的地址和读写方向后,主机或从机会返回一个应答 (ACK) 或非应答 (NACK) 信号,只收到应答信号后,主机才能继续发送或接收数据。
4.主机接收到应答信号后就开始发送数据(DATA),一般这段数据通常用于表示从设备内部的寄存器或存储器地址。在第二次的传输中才位数据读写的实际内容,即对该地址的内容进行读或写。也就是说,第一次通讯是告诉从机读写地址,第二次则是读写的实际内容。
2.具体信号及其相关函数编码
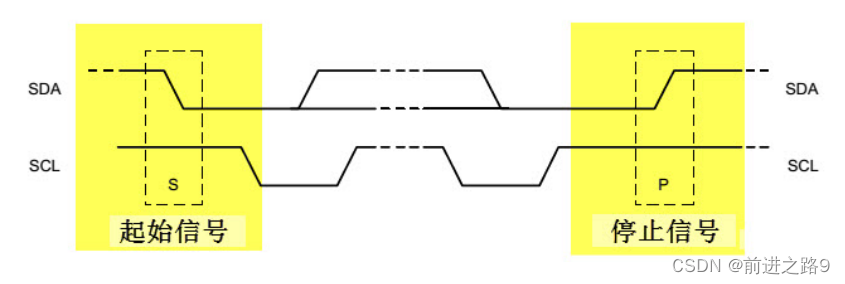
2.1.起始信号和停止信号
前文中提到的起始
(S)
和停止
(P)
信号是两种特殊的状态,见图
起始和停止信号
。当
SCL
线是高 电平时 SDA
线从高电平向低电平切换,这个情况表示通讯的起始。当
SCL
是高电平时
SDA
线由 低电平向高电平切换,表示通讯的停止。起始和停止信号一般由主机产生。
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线启动信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_Start(void)
{
I2C1_SDA_1();
I2C1_SCL_1();
I2c_Delay();
I2C1_SDA_0();
I2c_Delay();
I2C1_SCL_0();
I2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线停止信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_Stop(void)
{
I2C1_SDA_0();
I2C1_SCL_1();
I2c_Delay();
I2C1_SDA_1();
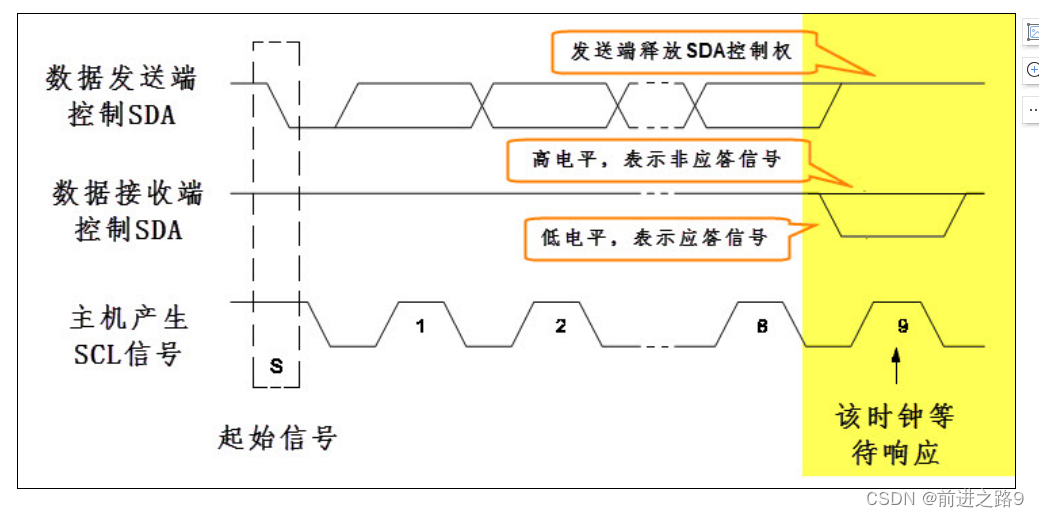
}2.2响应信号
I2C
的数据和地址传输都带响应。响应包括“应答
(ACK)
”和“非应答
(NACK)
”两种信号。作为
数据接收端时,当设备
(
无论主从机
)
接收到
I2C
传输的一个字节数据或地址后,若希望对方继
续发送数据,则需要向对方发送“应答
(ACK)
”信号,发送方会继续发送下一个数据;若接收端
希望结束数据传输,则向对方发送“非应答
(NACK)
”信号,发送方接收到该信号后会产生一个
停止信号,结束信号传输。见图
响应与非响应信号
/*
*********************************************************************************************************
* 函 数 名: i2c_Ack
* 功能说明: CPU产生一个ACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_Ack(void)
{
I2C1_SDA_0(); /* CPU驱动SDA = 0 */
I2c_Delay();
I2C1_SCL_1(); /* CPU产生1个时钟 */
I2c_Delay();
I2C1_SCL_0();
I2c_Delay();
I2C1_SDA_1(); /* CPU释放SDA总线 */
}
/*
*********************************************************************************************************
* 函 数 名: i2c_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_NAck(void)
{
I2C1_SDA_1(); /* CPU驱动SDA = 1 */
I2c_Delay();
I2C1_SCL_1(); /* CPU产生1个时钟 */
I2c_Delay();
I2C1_SCL_0();
I2c_Delay();
}
传输时主机产生时钟,在第
9
个时钟时,数据发送端会释放
SDA
的控制权,由数据接收端控制
SDA
,若
SDA
为高电平,表示非应答信号
(NACK)
,低电平表示应答信号
(ACK)
。
3.整体工程代码
3.1I2C.c和I2C.h
#include "I2c.h"
/*
*********************************************************************************************************
* 函 数 名: i2c_Delay
* 功能说明: I2C总线位延迟,最快400KHz
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
static void I2c_Delay()
{
uint8_t i;
for(i=0;i<40;i++);
/*
可用逻辑分析仪测量I2C通讯时的频率
工作条件:CPU主频168MHz ,MDK编译环境,1级优化
经测试,循环次数为20~250时都能通讯正常
*/
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线启动信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_Start(void)
{
I2C1_SDA_1();
I2C1_SCL_1();
I2c_Delay();
I2C1_SDA_0();
I2c_Delay();
I2C1_SCL_0();
I2c_Delay();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Start
* 功能说明: CPU发起I2C总线停止信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_Stop(void)
{
I2C1_SDA_0();
I2C1_SCL_1();
I2c_Delay();
I2C1_SDA_1();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_SendByte
* 功能说明: CPU向I2C总线设备发送8bit数据
* 形 参:_ucByte : 等待发送的字节
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_SendByte(uint8_t _Data)
{
uint8_t i;
for(i=0;i<8;i++){
if(_Data & 0x80){
I2C1_SDA_1();
}
else{
I2C1_SDA_0();
}
I2c_Delay();
I2C1_SCL_1();
I2c_Delay();
I2C1_SCL_0();
if(i==7){
I2C1_SDA_1();/*释放总线*/
}
_Data<<=1;
I2c_Delay();
}
}
/*
*********************************************************************************************************
* 函 数 名: i2c_ReadByte
* 功能说明: CPU从I2C总线设备读取8bit数据
* 形 参:无
* 返 回 值: 读到的数据
*********************************************************************************************************
*/
uint8_t I2c_ReadByte(void)
{
uint8_t j;
uint8_t value;
value = 0;
for(j=0;j<8;j++){
value<<=1;
I2C1_SCL_1();
I2c_Delay();
if(I2C_SDA_READ()){
value++;
}
I2C1_SCL_0();
I2c_Delay();
}
return value;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_WaitAck
* 功能说明: CPU产生一个时钟,并读取器件的ACK应答信号
* 形 参:无
* 返 回 值: 返回0表示正确应答,1表示无器件响应
*********************************************************************************************************
*/
uint8_t I2c_WaitAck(void)
{
uint8_t re;
I2C1_SDA_1(); /* CPU释放SDA总线 */
I2c_Delay();
I2C1_SCL_1(); /* CPU驱动SCL = 1, 此时器件会返回ACK应答 */
I2c_Delay();
if (I2C_SDA_READ()) /* CPU读取SDA口线状态 */
{
re = 1;
}
else
{
re = 0;
}
I2C1_SCL_0();
I2c_Delay();
return re;
}
/*
*********************************************************************************************************
* 函 数 名: i2c_Ack
* 功能说明: CPU产生一个ACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_Ack(void)
{
I2C1_SDA_0(); /* CPU驱动SDA = 0 */
I2c_Delay();
I2C1_SCL_1(); /* CPU产生1个时钟 */
I2c_Delay();
I2C1_SCL_0();
I2c_Delay();
I2C1_SDA_1(); /* CPU释放SDA总线 */
}
/*
*********************************************************************************************************
* 函 数 名: i2c_NAck
* 功能说明: CPU产生1个NACK信号
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void I2c_NAck(void)
{
I2C1_SDA_1(); /* CPU驱动SDA = 1 */
I2c_Delay();
I2C1_SCL_1(); /* CPU产生1个时钟 */
I2c_Delay();
I2C1_SCL_0();
I2c_Delay();
}
I2c_CfgGpio(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, I2C_SCL_Pin|I2C_SDA_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : I2C_SCL_Pin I2C_SDA_Pin */
GPIO_InitStruct.Pin = I2C_SCL_Pin|I2C_SDA_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
I2c_Stop();
}
/*
*********************************************************************************************************
* 函 数 名: i2c_CheckDevice
* 功能说明: 检测I2C总线设备,CPU向发送设备地址,然后读取设备应答来判断该设备是否存在
* 形 参:_Address:设备的I2C总线地址
* 返 回 值: 返回值 0 表示正确, 返回1表示未探测到
*********************************************************************************************************
*/
uint8_t I2c_CheckDevice(uint8_t _Address)
{
uint8_t ucAck;
I2c_CfgGpio(); /* 配置GPIO */
I2c_Start(); /* 发送启动信号 */
/* 发送设备地址+读写控制bit(0 = w, 1 = r) bit7 先传 */
I2c_SendByte(_Address | EEPROM_I2C_WR);
ucAck = I2c_WaitAck(); /* 检测设备的ACK应答 */
I2c_Stop(); /* 发送停止信号 */
return ucAck;
}#ifndef __I2C_H
#define __I2C_H
#include "main.h"
#define EEPROM_I2C_WR 0 /* 写控制bit */
#define EEPROM_I2C_RD 1 /* 读控制bit */
#define EEPROM_DEV_ADDR 0xA0 /* 24xx02的设备地址 */
#define EEPROM_PAGE_SIZE 8 /* 24xx02的页面大小 */
#define EEPROM_SIZE 256 /* 24xx02总容量 */
#if 1 /* 条件编译: 1 选择GPIO的库函数实现IO读写 HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_RESET)*/
#define I2C1_SCL_1() HAL_GPIO_WritePin(I2C_SCL_GPIO_Port, I2C_SCL_Pin,GPIO_PIN_SET) /* SCL = 1 */
#define I2C1_SCL_0() HAL_GPIO_WritePin(I2C_SCL_GPIO_Port, I2C_SCL_Pin,GPIO_PIN_RESET) /* SCL = 0 */
#define I2C1_SDA_1() HAL_GPIO_WritePin(I2C_SCL_GPIO_Port, I2C_SDA_Pin,GPIO_PIN_SET) /* SDA = 1 */
#define I2C1_SDA_0() HAL_GPIO_WritePin(I2C_SCL_GPIO_Port, I2C_SDA_Pin,GPIO_PIN_RESET) /* SDA = 0 */
#define I2C_SDA_READ() HAL_GPIO_ReadPin(I2C_SDA_GPIO_Port, I2C_SDA_Pin) /* 读SDA口线状态 */
#else /* 这个分支选择直接寄存器操作实现IO读写 */
/* 注意:如下写法,在IAR最高级别优化时,会被编译器错误优化 */
#define I2C_SCL_1() EEPROM_I2C_GPIO_PORT->BSRRL = EEPROM_I2C_SCL_PIN /* SCL = 1 */
#define I2C_SCL_0() EEPROM_I2C_GPIO_PORT->BSRRH = EEPROM_I2C_SCL_PIN /* SCL = 0 */
#define I2C_SDA_1() EEPROM_I2C_GPIO_PORT->BSRRL = EEPROM_I2C_SDA_PIN /* SDA = 1 */
#define I2C_SDA_0() EEPROM_I2C_GPIO_PORT->BSRRH = EEPROM_I2C_SDA_PIN /* SDA = 0 */
#endif
void I2c_Start(void);
void I2c_Stop(void);
void I2c_SendByte(uint8_t _ucByte);
uint8_t I2c_ReadByte(void);
uint8_t I2c_WaitAck(void);
void I2c_Ack(void);
void I2c_NAck(void);
uint8_t I2c_CheckDevice(uint8_t _Address);3.2E2.c和E2.h
#include "EE.h"
/*
*********************************************************************************************************
* 函 数 名: ee_CheckOk
* 功能说明: 判断串行EERPOM是否正常
* 形 参:无
* 返 回 值: 1 表示正常, 0 表示不正常
*********************************************************************************************************
*/
uint8_t CheckState(void)
{
if(I2c_CheckDevice(EEPROM_DEV_ADDR)==0)
{
return 1;
}
else
{
I2c_Stop();
return 0;
}
}
/*
*********************************************************************************************************
* 函 数 名: ee_ReadBytes
* 功能说明: 从串行EEPROM指定地址处开始读取若干数据
* 形 参:_usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pReadBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
uint8_t ee_ReadBytes(uint8_t *_pReadBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i;
/* 采用串行EEPROM随即读取指令序列,连续读取若干字节 */
/* 第1步:发起I2C总线启动信号 */
I2c_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
I2c_SendByte(EEPROM_DEV_ADDR|EEPROM_I2C_WR);/* 此处是写指令 */
/* 第3步:等待ACK */
if(I2c_WaitAck()!=0){
goto Cmd_Fail;/* EEPROM器件无应答 */
}
/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,如果是24C04以上,那么此处需要连发多个地址 */
I2c_SendByte((uint8_t)_usAddress);
/* 第5步:等待ACK */
if(I2c_WaitAck()!=0){
goto Cmd_Fail;/* EEPROM器件无应答 */
}
/* 第6步:重新启动I2C总线。前面的代码的目的向EEPROM传送地址,下面开始读取数据 */
I2c_Start();
/* 第7步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
I2c_SendByte(EEPROM_DEV_ADDR|EEPROM_I2C_RD);/* 此处是读指令 */
/* 第8步:发送ACK */
if (I2c_WaitAck() != 0)
{
goto Cmd_Fail; /* EEPROM器件无应答 */
}
/* 第9步:循环读取数据 */
for (i = 0; i < _usSize; i++)
{
_pReadBuf[i] = I2c_ReadByte(); /* 读1个字节 */
/* 每读完1个字节后,需要发送Ack, 最后一个字节不需要Ack,发Nack */
if (i != _usSize - 1)
{
I2c_Ack(); /* 中间字节读完后,CPU产生ACK信号(驱动SDA = 0) */
}
else
{
I2c_NAck(); /* 最后1个字节读完后,CPU产生NACK信号(驱动SDA = 1) */
}
}
/* 发送I2C总线停止信号 */
I2c_Stop();
return 1;
/* 执行成功 */
Cmd_Fail:/* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
I2c_Stop();
return 0;
}
/*
*********************************************************************************************************
* 函 数 名: ee_WriteBytes
* 功能说明: 向串行EEPROM指定地址写入若干数据,采用页写操作提高写入效率
* 形 参:_usAddress : 起始地址
* _usSize : 数据长度,单位为字节
* _pWriteBuf : 存放读到的数据的缓冲区指针
* 返 回 值: 0 表示失败,1表示成功
*********************************************************************************************************
*/
uint8_t ee_WriteBytes(uint8_t *_pWriteBuf, uint16_t _usAddress, uint16_t _usSize)
{
uint16_t i,m;
uint16_t usAddr;
/*
写串行EEPROM不像读操作可以连续读取很多字节,每次写操作只能在同一个page。
对于24xx02,page size = 8
简单的处理方法为:按字节写操作模式,没写1个字节,都发送地址
为了提高连续写的效率: 本函数采用page wirte操作。
*/
usAddr = _usAddress;
for (i = 0; i < _usSize; i++)
{
/* 当发送第1个字节或是页面首地址时,需要重新发起启动信号和地址 */
if ((i == 0) || (usAddr & (EEPROM_PAGE_SIZE - 1)) == 0)
{
/* 第0步:发停止信号,启动内部写操作 */
I2c_Stop();
/* 通过检查器件应答的方式,判断内部写操作是否完成, 一般小于 10ms
CLK频率为200KHz时,查询次数为30次左右
*/
for (m = 0; m < 1000; m++)
{
/* 第1步:发起I2C总线启动信号 */
I2c_Start();
/* 第2步:发起控制字节,高7bit是地址,bit0是读写控制位,0表示写,1表示读 */
I2c_SendByte(EEPROM_DEV_ADDR | EEPROM_I2C_WR); /* 此处是写指令 */
/* 第3步:发送一个时钟,判断器件是否正确应答 */
if (I2c_WaitAck() == 0)
{
break;
}
}
if (m == 1000)
{
goto cmd_fail; /* EEPROM器件写超时 */
}
/* 第4步:发送字节地址,24C02只有256字节,因此1个字节就够了,如果是24C04以上,那么此处需要连发多个地址 */
I2c_SendByte((uint8_t)usAddr);
/* 第5步:等待ACK */
if (I2c_WaitAck() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
}
/* 第6步:开始写入数据 */
I2c_SendByte(_pWriteBuf[i]);
/* 第7步:发送ACK */
if (I2c_WaitAck() != 0)
{
goto cmd_fail; /* EEPROM器件无应答 */
}
usAddr++; /* 地址增1 */
}
/* 命令执行成功,发送I2C总线停止信号 */
I2c_Stop();
return 1;
cmd_fail: /* 命令执行失败后,切记发送停止信号,避免影响I2C总线上其他设备 */
/* 发送I2C总线停止信号 */
I2c_Stop();
return 0;
}
void ee_Erase(void)
{
uint16_t i;
uint8_t buf[EEPROM_SIZE];
/* 填充缓冲区 */
for (i = 0; i < EEPROM_SIZE; i++)
{
buf[i] = 0xFF;
}
/* 写EEPROM, 起始地址 = 0,数据长度为 256 */
if (ee_WriteBytes(buf, 0, EEPROM_SIZE) == 0)
{
printf("擦除eeprom出错!\r\n");
return;
}
else
{
printf("擦除eeprom成功!\r\n");
}
}
/*--------------------------------------------------------------------------------------------------*/
static void ee_Delay(__IO uint32_t nCount) //简单的延时函数
{
for(; nCount != 0; nCount--);
}
/*
* eeprom AT24C02 读写测试
* 正常返回1,异常返回0
*/
uint8_t ee_Test(void)
{
uint16_t i;
uint8_t write_buf[EEPROM_SIZE];
uint8_t read_buf[EEPROM_SIZE];
/*-----------------------------------------------------------------------------------*/
if (CheckState() == 0)
{
/* 没有检测到EEPROM */
printf("没有检测到串行EEPROM!\r\n");
return 0;
}
/*------------------------------------------------------------------------------------*/
/* 填充测试缓冲区 */
for (i = 0; i < EEPROM_SIZE; i++)
{
write_buf[i] = i;
}
/*------------------------------------------------------------------------------------*/
if (ee_WriteBytes(write_buf, 0, EEPROM_SIZE) == 0)
{
printf("写eeprom出错!\r\n");
return 0;
}
else
{
printf("写eeprom成功!\r\n");
}
/*写完之后需要适当的延时再去读,不然会出错*/
ee_Delay(0x0FFFFF);
/*-----------------------------------------------------------------------------------*/
if (ee_ReadBytes(read_buf, 0, EEPROM_SIZE) == 0)
{
printf("读eeprom出错!\r\n");
return 0;
}
else
{
printf("读eeprom成功,数据如下:\r\n");
}
/*-----------------------------------------------------------------------------------*/
for (i = 0; i < EEPROM_SIZE; i++)
{
if(read_buf[i] != write_buf[i])
{
printf("0x%02X ", read_buf[i]);
printf("错误:EEPROM读出与写入的数据不一致");
return 0;
}
printf(" %02X", read_buf[i]);
if ((i & 15) == 15)
{
printf("\r\n");
}
}
printf("eeprom读写测试成功\r\n");
return 1;
}#ifndef __EE_H
#define __EE_H
#include "main.h"
#include "I2C/I2c.h"
/*
* AT24C02 2kb = 2048bit = 2048/8 B = 256 B
* 32 pages of 8 bytes each
*
* Device Address
* 1 0 1 0 A2 A1 A0 R/W
* 1 0 1 0 0 0 0 0 = 0XA0
* 1 0 1 0 0 0 0 1 = 0XA1
*/
/* AT24C01/02每页有8个字节
* AT24C04/08A/16A每页有16个字节
*/
#define EEPROM_DEV_ADDR 0xA0 /* 24xx02的设备地址 */
#define EEPROM_PAGE_SIZE 8 /* 24xx02的页面大小 */
#define EEPROM_SIZE 256 /* 24xx02总容量 */
uint8_t ee_CheckOk(void);
uint8_t ee_ReadBytes(uint8_t *_pReadBuf, uint16_t _usAddress, uint16_t _usSize);
uint8_t ee_WriteBytes(uint8_t *_pWriteBuf, uint16_t _usAddress, uint16_t _usSize);
void ee_Erase(void);
uint8_t ee_Test(void);
#endif /* __I2C_EE_H */














 1034
1034











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









