






一、Q-Learning理论基础
1.1 强化学习基本概念
强化学习(Reinforcement Learning, RL)是一种机器学习方法,它通过与环境的交互来学习如何实现特定的目标。在强化学习中,一个智能体(Agent)在环境中通过执行动作(Action)来改变状态(State),并根据状态转移获得奖励(Reward)。智能体的目标是最大化其长期累积奖励,这通常涉及到策略(Policy)的学习,即在给定状态下选择最佳动作的规则。
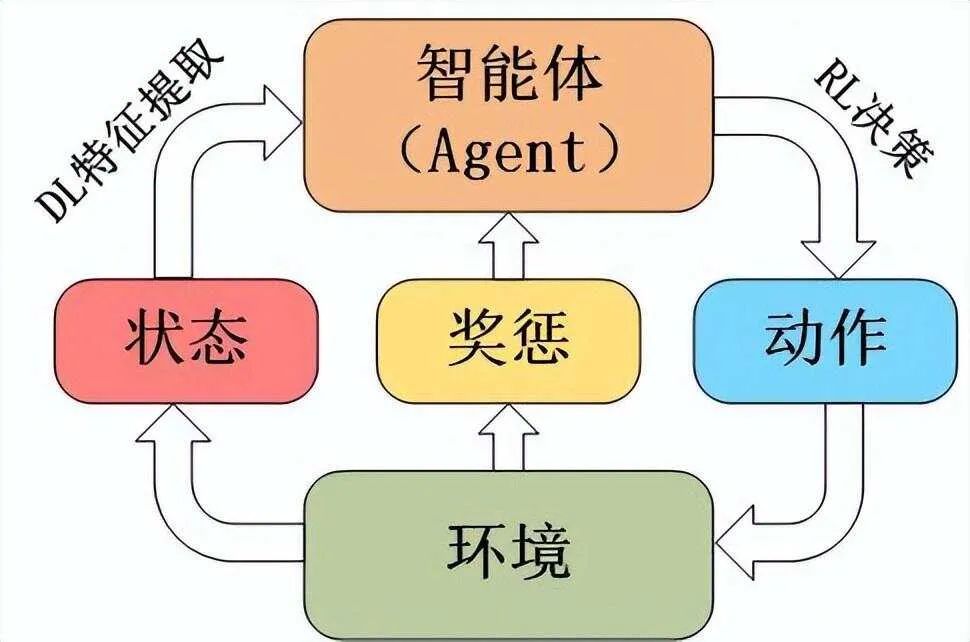
强化学习的关键组成部分包括:
-
状态(State):智能体所处的环境情况。
-
动作(Action):智能体在特定状态下可以执行的行为。
-
奖励(Reward):智能体执行动作后从环境中获得的反馈,用于评价动作的好坏。
-
策略(Policy):智能体选择动作的规则或策略,可以是确定性的或随机性的。
-
价值函数(Value Function):预测智能体从某个状态出发,遵循特定策略所能获得的累积奖励。
1.2 Q值函数定义
Q值函数,也称为动作价值函数(Action-Value Function),是一种特殊的价值函数,它估计了在给定状态下采取特定动作的预期回报。
Q-Learning算法通过迭代更新Q值来逼近最优Q函数。算法流程包括初始化Q表、选择动作、执行动作、更新Q值等步骤。
1.3 Q-Learning算法流程
-
初始化Q表:创建一个Q表,通常初始化为零或其他小的随机值。
-
选择动作:在每个时间步骤中,智能体根据当前状态和Q表选择一个动作。这通常涉及到探索和利用的权衡,以确保在学习过程中不断探索新的动作策略。
-
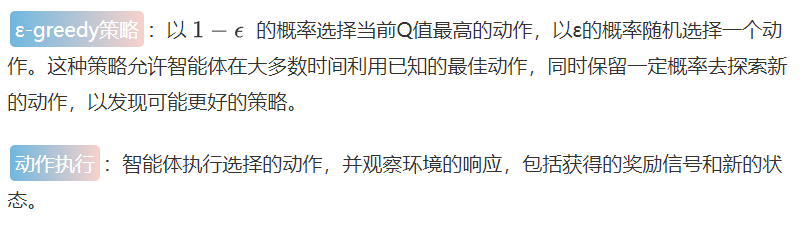
执行动作:智能体执行所选择的动作,并观察环境的响应,包括获得的奖励信号和新的状态。
-
更新Q值:根据观察到的奖励信号和新的状态,智能体更新Q值。这涉及到使用Q-Learning的更新规则,如贝尔曼方程。
-
重复迭代:智能体不断地执行上述步骤,与环境互动,学习和改进Q值函数,直到达到停止条件。
1.4 Q-Learning计算公式
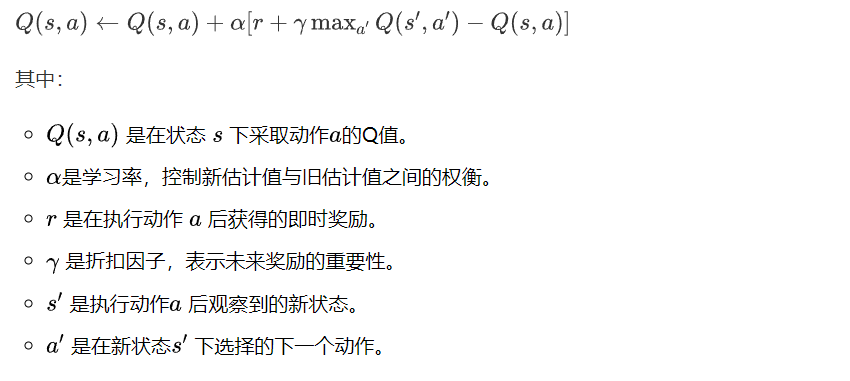
Q-Learning的核心是更新Q值的公式,该公式基于贝尔曼方程:
其中:
二、Q-Learning算法流程详解
2.1 初始化Q值
Q-Learning算法的第一步是初始化Q值。Q值,或称为动作价值,表示在特定状态下采取特定动作的预期回报。在算法开始时,Q值通常被初始化为零或小的随机数,以表示我们对环境的无知。这个Q表将随着智能体与环境的交互而不断更新和改进。

2.2 选择动作与执行
在每个时间步骤中,智能体需要根据当前状态选择一个动作。Q-Learning使用ε-greedy策略来平衡探索(exploration)和利用(exploitation)。
2.3 环境反馈与Q值更新
智能体根据环境的反馈更新Q值,这是Q-Learning算法的核心步骤。
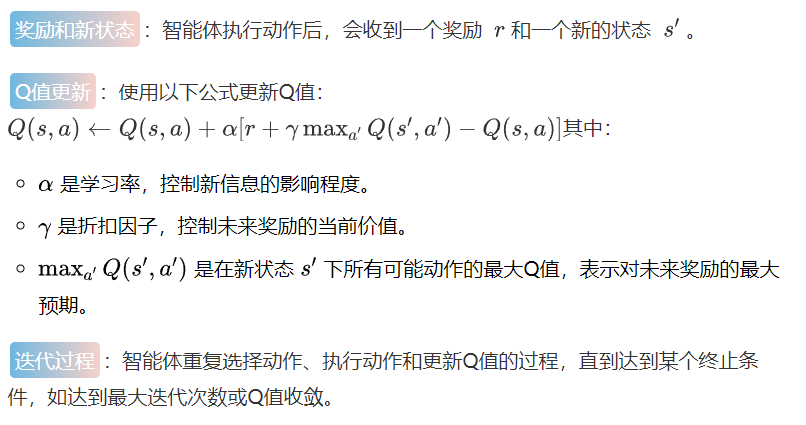
通过这些步骤,Q-Learning算法能够学习在给定状态下采取哪些动作能够最大化长期累积奖励,而无需了解环境的具体动态。这种无模型的方法使得Q-Learning在许多实际应用中非常有用,尤其是在模型难以获得或过于复杂时。
三、Q-Learning计算公式
3.1 Q值更新公式
Q-Learning的核心计算公式是Q值更新公式,该公式基于贝尔曼方程,并用于迭代地更新状态-动作对的价值估计。Q值更新公式如下:
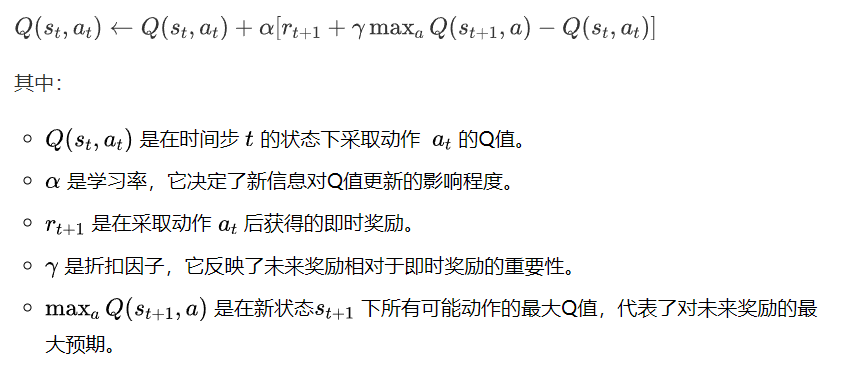
这个公式结合了即时奖励和对未来奖励的预期,通过不断更新Q值,智能体可以学习到在每个状态下应该采取哪个动作以最大化长期累积奖励。
3.2 贝尔曼方程与最优策略
贝尔曼方程是动态规划中的核心原理,它描述了一个状态的价值可以通过即时奖励和未来价值的总和来计算。对于Q-Learning来说,贝尔曼方程用于计算最优策略下的Q值,即:
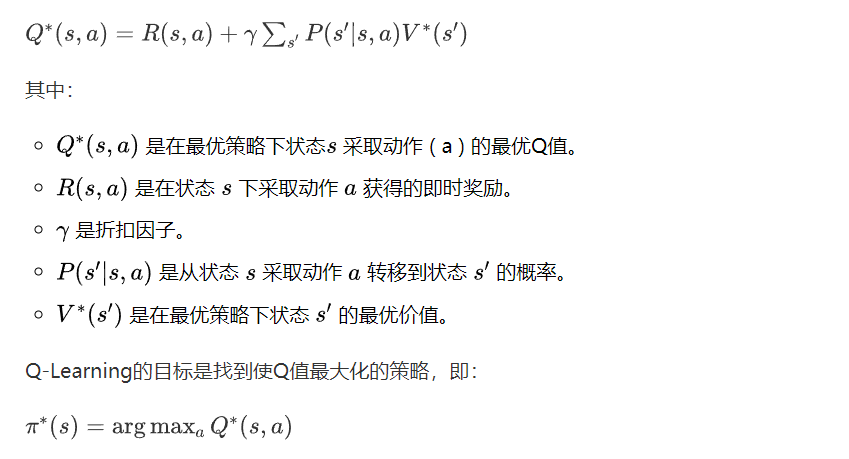
这意味着在给定状态下,最优策略是选择能够使Q值最大的动作。通过不断迭代更新Q值,Q-Learning算法能够收敛到最优Q值,从而学习到最优策略。
四、Q-Learning算法特点
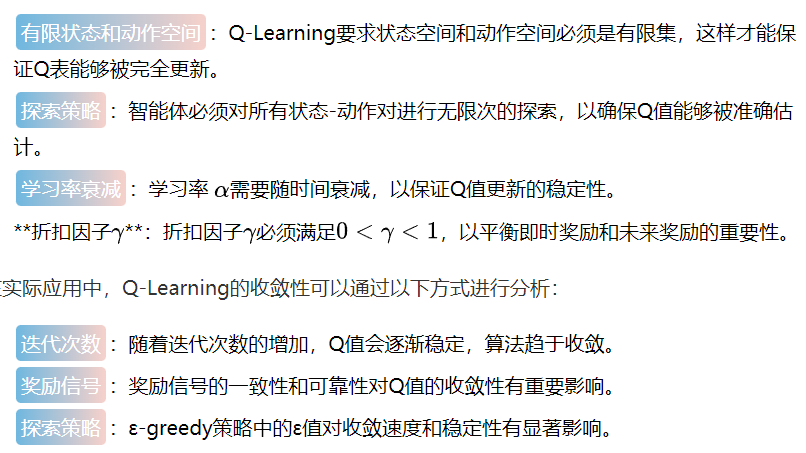
4.1 收敛性分析
Q-Learning算法的收敛性是其理论基础的重要组成部分。在一定条件下,Q-Learning能够收敛到最优策略。这些条件包括:
4.2 探索与利用平衡
Q-Learning中的探索与利用平衡是通过ε-greedy策略实现的。这种策略允许智能体在探索新动作和利用已知最佳动作之间进行权衡:
-
探索:以ε的概率随机选择动作,以发现新的状态-动作对和潜在的更高回报。
-
利用:以的概率选择当前Q表中Q值最高的动作,以利用已有的知识。
ε值的动态调整对平衡探索与利用至关重要:
-
初始值:初始时,ε值通常设置较高,以促进探索。
-
衰减:随着学习的进行,ε值逐渐减小,使智能体更多地利用已知的最佳策略。
-
自适应调整:在某些变体中,ε值可以根据学习进度自适应调整,以优化探索与利用的平衡。
4.3 应用领域
Q-Learning算法因其简单性和有效性,在多个领域得到了广泛应用:
-
游戏:Q-Learning被广泛应用于各种棋盘游戏和视频游戏的AI开发,如Atari游戏和围棋等。
-
机器人导航:在机器人技术中,Q-Learning用于训练机器人在复杂环境中进行路径规划和导航。
-
自动驾驶:自动驾驶系统中,Q-Learning可以帮助车辆学习如何在不同的交通状况下做出决策。
-
资源管理:在网络和能源领域,Q-Learning用于优化资源分配,如网络流量控制和电力分配。
-
推荐系统:Q-Learning可以帮助系统学习用户的行为模式,提供个性化的推荐。
-
自然语言处理:Q-Learning也被用于自然语言处理任务,如对话系统和机器翻译。
-
健康医疗:在医疗领域,Q-Learning可以用于辅助诊断、治疗计划的制定,以及医疗资源的优化配置。
-
教育技术:Q-Learning可以用于开发智能教学系统,通过学习学生的行为和反馈来个性化教学内容和方法。
四、相关案例代码
4.1 迷宫问题求解
在迷宫问题中,Q-Learning算法被用来训练一个智能体找到从起点到终点的最短路径。以下是一个简化的迷宫问题求解案例代码:
import numpy as np
# 迷宫环境设置
maze = np.array([
[0, 0, -1, 0],
[0, -1, -1, 0],
[0, 0, 0, 1]
])
rows, cols = maze.shape
start, end = (0, 0), (2, 3)
# Q-Learning参数
alpha = 0.1# 学习率
gamma = 0.9# 折扣因子
epsilon = 0.1# 探索概率
# 初始化Q表
Q = np.zeros((rows, cols, 4)) # 4个动作:上、下、左、右
# 动作索引
actions = {
0: (-1, 0), # 上
1: (1, 0), # 下
2: (0, -1), # 左
3: (0, 1) # 右
}
# 训练过程
for episode in range(1000):
state = start
while state != end:
if np.random.rand() < epsilon:
action_index = np.random.choice([0, 1, 2, 3])
else:
action_index = np.argmax(Q[state[0], state[1]])
action = actions[action_index]
next_state = (state[0] + action[0], state[1] + action[1])
# 检查边界和障碍
if0 <= next_state[0] < rows and0 <= next_state[1] < cols and maze[next_state[0], next_state[1]] != -1:
reward = 0
if next_state == end:
reward = 1
# 更新Q表
Q[state[0], state[1], action_index] += alpha * (reward + gamma * np.max(Q[next_state[0], next_state[1]]) - Q[state[0], state[1], action_index])
state = next_state
else:
# 撞墙,惩罚
Q[state[0], state[1], action_index] += alpha * (-1 - Q[state[0], state[1], action_index])
# 输出最终的Q表
print("Final Q-Table:")
print(Q)
4.2 游戏表格路径寻找
Q-Learning算法也可以应用于基于表格的游戏中,以寻找最优路径。以下是一个简化的游戏表格路径寻找案例代码:
import numpy as np
# 游戏环境设置
game_board = np.array([
[1, 0, 0, 0],
[0, -1, 0, 0],
[0, 0, 0, 1],
[0, 0, -1, 1]
])
start, end = (0, 0), (3, 3)
# Q-Learning参数
alpha = 0.1# 学习率
gamma = 0.9# 折扣因子
epsilon = 0.1# 探索概率
# 初始化Q表
Q = np.zeros((4, 4, 4)) # 4x4游戏板,4个动作
# 动作索引
actions = {
0: (-1, 0), # 上
1: (1, 0), # 下
2: (0, -1), # 左
3: (0, 1) # 右
}
# 训练过程
for episode in range(1000):
state = start
while state != end:
if np.random.rand() < epsilon:
action_index = np.random.choice([0, 1, 2, 3])
else:
action_index = np.argmax(Q[state[0], state[1]])
action = actions[action_index]
next_state = (state[0] + action[0], state[1] + action[1])
# 检查边界
if0 <= next_state[0] < 4and0 <= next_state[1] < 4:
reward = game_board[next_state[0], next_state[1]]
# 更新Q表
Q[state[0], state[1], action_index] += alpha * (reward + gamma * np.max(Q[next_state[0], next_state[1]]) - Q[state[0], state[1], action_index])
state = next_state
else:
# 边界外,惩罚
Q[state[0], state[1], action_index] += alpha * (-1 - Q[state[0], state[1], action_index])
# 输出最终的Q表
print("Final Q-Table:")
print(Q)
以上代码展示了如何使用Q-Learning算法解决迷宫问题和游戏表格路径寻找问题。通过不断的迭代和学习,智能体能够学习到在不同状态下采取不同动作的最优策略。
五、如何系统学习掌握AI大模型?
AI大模型作为人工智能领域的重要技术突破,正成为推动各行各业创新和转型的关键力量。抓住AI大模型的风口,掌握AI大模型的知识和技能将变得越来越重要。
学习AI大模型是一个系统的过程,需要从基础开始,逐步深入到更高级的技术。
这里给大家精心整理了一份
全面的AI大模型学习资源,包括:AI大模型全套学习路线图(从入门到实战)、精品AI大模型学习书籍手册、视频教程、实战学习、面试题等,资料免费分享!

1. 成长路线图&学习规划
要学习一门新的技术,作为新手一定要先学习成长路线图,方向不对,努力白费。
这里,我们为新手和想要进一步提升的专业人士准备了一份详细的学习成长路线图和规划。可以说是最科学最系统的学习成长路线。

2. 大模型经典PDF书籍
书籍和学习文档资料是学习大模型过程中必不可少的,我们精选了一系列深入探讨大模型技术的书籍和学习文档,它们由领域内的顶尖专家撰写,内容全面、深入、详尽,为你学习大模型提供坚实的理论基础。(书籍含电子版PDF)

3. 大模型视频教程
对于很多自学或者没有基础的同学来说,书籍这些纯文字类的学习教材会觉得比较晦涩难以理解,因此,我们提供了丰富的大模型视频教程,以动态、形象的方式展示技术概念,帮助你更快、更轻松地掌握核心知识。

4. 2024行业报告
行业分析主要包括对不同行业的现状、趋势、问题、机会等进行系统地调研和评估,以了解哪些行业更适合引入大模型的技术和应用,以及在哪些方面可以发挥大模型的优势。

5. 大模型项目实战
学以致用 ,当你的理论知识积累到一定程度,就需要通过项目实战,在实际操作中检验和巩固你所学到的知识,同时为你找工作和职业发展打下坚实的基础。

6. 大模型面试题
面试不仅是技术的较量,更需要充分的准备。
在你已经掌握了大模型技术之后,就需要开始准备面试,我们将提供精心整理的大模型面试题库,涵盖当前面试中可能遇到的各种技术问题,让你在面试中游刃有余。

全套的AI大模型学习资源已经整理打包,有需要的小伙伴可以
微信扫描下方CSDN官方认证二维码,免费领取【保证100%免费】


















 3209
3209

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









