







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
❤️ 内容介绍
在现代城市交通中,交通拥堵问题一直是一个令人头痛的难题。特别是在繁忙的十字路口,由于车辆流量大、道路容量有限,常常会出现交通堵塞的情况。为了解决这个问题,许多研究人员和交通管理部门一直在寻找有效的方法来优化交通信号灯的控制,以提高交通流量和减少拥堵。
在本文中,我们将介绍一种基于遗传算法的方法,用于优化绿灯时间,以实现单个十字路口的交通拥堵情况疏通。遗传算法是一种模拟自然选择和遗传机制的优化算法,可以用于解决复杂的优化问题。
首先,让我们了解一下遗传算法的基本原理。遗传算法的核心思想是通过模拟进化过程来搜索最优解。它使用一组候选解(称为个体)来构建一个种群,每个个体都有一组基因表示其特征。在每一代中,通过遗传操作(交叉和变异)对个体进行操作,以生成新的个体。然后,使用适应度函数评估每个个体的适应度,适应度越高,个体越有可能被选择为下一代的父代。通过多代的进化,遗传算法可以找到最优解或接近最优解的解。
在我们的研究中,我们将十字路口的交通流量和拥堵情况建模为一个优化问题。我们的目标是找到最佳的绿灯时间分配方案,以最大程度地减少交通拥堵。我们将绿灯时间分配方案表示为一个基因组,其中每个基因表示一个红绿灯的绿灯时间。通过遗传算法的进化过程,我们可以找到最佳的绿灯时间分配方案。
在实际应用中,我们需要收集十字路口的交通流量数据,并进行适当的预处理和分析。然后,我们可以将这些数据作为适应度函数的输入,用于评估每个个体的适应度。适应度函数可以根据交通流量和拥堵情况的指标来定义,例如平均车辆延误时间、车辆通过率等。通过不断迭代和优化,我们可以找到最佳的绿灯时间分配方案,以最大程度地减少交通拥堵。
然而,需要注意的是,优化红绿灯时间只是解决交通拥堵问题的一部分。在实际应用中,还需要考虑其他因素,例如行人安全、公交车优先等。因此,在实际应用中,我们需要综合考虑各种因素,以找到一个平衡的解决方案。
总之,基于遗传算法的优化方法可以有效地优化绿灯时间,以实现单个十字路口的交通拥堵情况疏通。然而,需要注意的是,交通拥堵问题是一个复杂的问题,需要综合考虑各种因素。因此,在实际应用中,我们需要综合运用各种优化方法和技术,以找到一个最佳的解决方案。通过持续的研究和创新,我们相信可以进一步改善城市交通的效率和便利性。
🔥核心代码
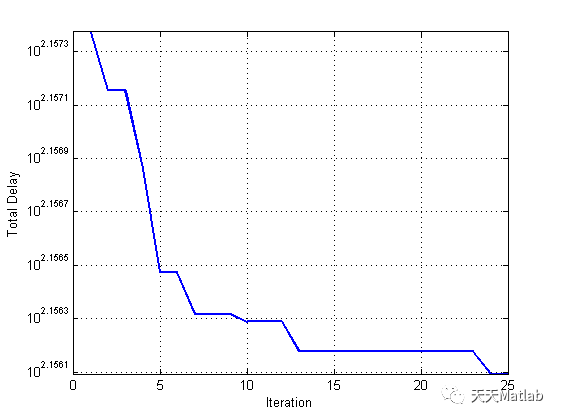
%% Starting point, clear everything in matlabtic;clear all;close all;clc;%% Problem FormulationFitnessFunction=@(C,g,x,c) TDi(C,g,x,c); % FitnessFunctionnLights=4; % Number of Traffic LightsnIntersections=1; % Number of Intersections (static as 1 intersection)VarSize=[1 nIntersections*nLights]; % Decision Chromosome genes based on number of IntersectionsgreenMin= 10; % Lower bound of GREEN LIGHTgreenMax= 60; % Upper bound of GREEN LIGHTCyclemin=60; % Lower bound of CYCLECyclemax=180 ;RoadcapacityNSWE=[20,20,20,20]; % Road Capacity for NSWE respectivellyCarsNSWE=[20,20,11,17];RoadCongestion1NSWE=RoadcapacityNSWE-CarsNSWE; % congestion according to free road spacesRoadCongestionNSWE=RoadCongestion1NSWE./RoadcapacityNSWE; % Volume/Capacity RATIOcarpass=5;%% Genetic Algorithm ParametersMaxIt=25; % Maximum Number of IterationsnPop=400; % Population Sizepc=0.5; % Crossover Percentagenc=2*round(pc*nPop/2); % Number of Offsprings (parents)pm=0.02; % Mutation Percentagenm=round(pm*nPop); % Number of Mutantsmu=0.1; % Mutation Ratepinv=0.2;ninv=round(pinv*nPop);beta=8; % Selection Pressure%% Initialization% Individual Structureempty_individual.GreenNSWE=[];empty_individual.TotalDelay=[];% Population Structurepop=repmat(empty_individual,nPop,1);% Initialize Populationi=1;current_cycle=160-12; %estw kiklos 160 seconds - 12 seconds gia kitrinowhile i<=nPop% Initialize Individualpop(i).GreenNSWE=randi([greenMin greenMax],VarSize);% Cycle time rules% if(sum(CarsNSWE)<10)% current_cycle(i)=randi([Cyclemin 80]);% elseif(sum(CarsNSWE)<15)% current_cycle(i)=randi([80 100]);% elseif(sum(CarsNSWE)<20)% current_cycle(i)=randi([100 120]);% elseif(sum(CarsNSWE)<25)% current_cycle(i)=randi([120 140]);% elseif(sum(CarsNSWE)<30)% current_cycle(i)=randi([140 160]);% else% current_cycle=180;% end% current_cycle=current_cycle(:);if(sum(pop(i).GreenNSWE)>current_cycle)continue;end% Individual Evaluation from Fitness Functionfor j=1:nLights% Measure Delay for each traffic light with current congestionpop(i).TotalDelay(j)=FitnessFunction(current_cycle,pop(i).GreenNSWE(j),RoadCongestionNSWE(j),RoadcapacityNSWE(j));end% Summation of Total Delays quotientspop(i).TotalDelay= real(sum(pop(i).TotalDelay));i=i+1;end% Sort PopulationTotalDelay=[pop.TotalDelay];[TotalDelay, SortOrder]=sort(TotalDelay);pop=pop(SortOrder);% Store Best SolutionBestSol=pop(1);% Store Best FitnessBestDelay=pop(1).TotalDelay;% Worst FitnessWorstDelay=pop(end).TotalDelay;disp(['FIRST Population..........Best TotalDelay = ' num2str(BestDelay)]);fprintf('\n')disp('Green Timings in seconds:');disp([' North Green time = ' num2str(BestSol.GreenNSWE(1))]);fprintf('\n')disp([' South Green time = ' num2str(BestSol.GreenNSWE(2))]);fprintf('\n')disp([' West Green time = ' num2str(BestSol.GreenNSWE(3))]);fprintf('\n')disp([' East Green time = ' num2str(BestSol.GreenNSWE(4))]);fprintf('\n')%% Loop For Number of Iterationscount=0;for it=1:MaxIt% TERMINATION CRITERIA IF NEEDED% if(it>2)% if(BestDelay(it-1)==BestDelay(it-2))% count=count+1;% else% count=0;% end% end% if(count>5)% disp('5 Generations without evolution. Process Stopped !');% break;% end% Calculate Selection ProbabilitiesP=exp(-beta*TotalDelay/WorstDelay);P=P/sum(P);%% Crossoverpopc=repmat(empty_individual,nc/2,2);k=1;while k<=nc/2% Select Parents Indices from roulette wheeli1=RouletteWheelSelection(P);i2=RouletteWheelSelection(P);% Select Parentsp1=pop(i1);p2=pop(i2);popc(k,1).GreenNSWE=p1.GreenNSWE;popc(k,2).GreenNSWE=p2.GreenNSWE;popc(k,1).TotalDelay=p1.TotalDelay;popc(k,2).TotalDelay=p2.TotalDelay;% Select random crossover pointi=randi([1 3]);% crossover randomnessif(i==1)popc1=popc(k,1).GreenNSWE(2);popc(k,1).GreenNSWE(2)= popc(k,2).GreenNSWE(2);popc(k,2).GreenNSWE(2)=popc1;popc1=popc(k,1).GreenNSWE(3);popc(k,1).GreenNSWE(3)= popc(k,2).GreenNSWE(3);popc(k,2).GreenNSWE(3)=popc1;popc1=popc(k,1).GreenNSWE(4);popc(k,1).GreenNSWE(4)= popc(k,2).GreenNSWE(4);popc(k,2).GreenNSWE(4)=popc1;elseif(i==2)popc1=popc(k,1).GreenNSWE(3);popc(k,1).GreenNSWE(3)= popc(k,2).GreenNSWE(3);popc(k,2).GreenNSWE(3)=popc1;popc1=popc(k,1).GreenNSWE(4);popc(k,1).GreenNSWE(4)= popc(k,2).GreenNSWE(4);popc(k,2).GreenNSWE(4)=popc1;elsepopc1=popc(k,1).GreenNSWE(4);popc(k,1).GreenNSWE(4)= popc(k,2).GreenNSWE(4);popc(k,2).GreenNSWE(4)=popc1;end% check if new green times are out constraints 10-60s. If it is% get it to closer min or maxpopc(k,1).GreenNSWE=max(popc(k,1).GreenNSWE,greenMin);popc(k,1).GreenNSWE=min(popc(k,1).GreenNSWE,greenMax);popc(k,2).GreenNSWE=max(popc(k,2).GreenNSWE,greenMin);popc(k,2).GreenNSWE=min(popc(k,2).GreenNSWE,greenMax);if(sum(popc(k,1).GreenNSWE)>current_cycle || sum(popc(k,2).GreenNSWE)>current_cycle)continue;end% Evaluate Generated Offsprings for each traffic light according to% the corresponding traffic congestionfor j=1:nLightspopc(k,1).TotalDelay(j)=FitnessFunction(current_cycle, popc(k,1).GreenNSWE(j), RoadCongestionNSWE(j),RoadcapacityNSWE(j));popc(k,2).TotalDelay(j)=FitnessFunction(current_cycle, popc(k,2).GreenNSWE(j), RoadCongestionNSWE(j),RoadcapacityNSWE(j));end% TOTAL DELAY which correspongs to the summation of of 4 lights quotientspopc(k,1).TotalDelay= real(sum(popc(k,1).TotalDelay));popc(k,2).TotalDelay= real(sum(popc(k,2).TotalDelay));k=k+1; %stepend% Make 2 rows 1popc=popc(:);% Sort popc matrix according to TotalDelayTotalDelay=[popc.TotalDelay];[TotalDelay, SortOrder]=sort(TotalDelay);popc=popc(SortOrder);%% Mutation% Create empty Matrix with length the number of mutantspopm=repmat(empty_individual,nm,1);k=1;while k<=nm% Select Parent populationi=randi([1 nPop]); %nPop value 100p=pop(i);% Apply MutationnVar=4;nmu=ceil(mu*nVar);j=randi([1 nVar]);prosimo=randi([-1 1]);sigma=prosimo*0.02*(greenMax-greenMin);mutated=p.GreenNSWE(j)+sigma;popm(k).GreenNSWE = p.GreenNSWE;popm(k).GreenNSWE(j)=mutated;popm(k).GreenNSWE=max(popm(k).GreenNSWE,greenMin);popm(k).GreenNSWE=min(popm(k).GreenNSWE,greenMax);if(sum(popm(k).GreenNSWE)>current_cycle)continue;endfor j=1:nLights% Evaluate Mutantpopm(k).TotalDelay(j)=FitnessFunction(current_cycle, popm(k).GreenNSWE(j), RoadCongestionNSWE(j),RoadcapacityNSWE(j));end% Summation of delay quotientspopm(k).TotalDelay=real(sum(popm(k).TotalDelay));k=k+1; %stepend%% INVERSION% Create empty Matrixpopinv=repmat(empty_individual,nm,1);k=1;while k<=ninv% Select Parent populationi=randi([1 nPop]);p=pop(i);% Apply InversionnVar=numel(p.GreenNSWE);randomgene1=randi([1 4]);randomgene2=randi([1 4]);y=p.GreenNSWE;popinv(k).GreenNSWE=y;x=popinv(k).GreenNSWE(randomgene1);popinv(k).GreenNSWE(randomgene1)=popinv(k).GreenNSWE(randomgene2);popinv(k).GreenNSWE(randomgene2)=x;popinv(k).GreenNSWE=max(popinv(k).GreenNSWE,greenMin);popinv(k).GreenNSWE=min(popinv(k).GreenNSWE,greenMax);if(sum(popinv(k).GreenNSWE)>current_cycle)continue;endfor j=1:nLights% Evaluate Mutantpopinv(k).TotalDelay(j)=FitnessFunction(current_cycle, popinv(k).GreenNSWE(j), RoadCongestionNSWE(j),RoadcapacityNSWE(j));end% Summation of delay quotientspopinv(k).TotalDelay=real(sum(popinv(k).TotalDelay));k=k+1;end% Make 2 rows 1popinv=popinv(:);%% Merge Populationpop=[poppopcpopmpopinv]; %#ok% Sort New Population according to TotalDelayTotalDelay=[pop.TotalDelay];[TotalDelay, SortOrder]=sort(TotalDelay);pop=pop(SortOrder);% Update Worst CostWorstDelay=max(WorstDelay,pop(end).TotalDelay);% Keep the Best Population from the given numberpop=pop(1:nPop);TotalDelay=TotalDelay(1:nPop);% Store Best Solution Ever FoundBestSol=pop(1);% Store Best Cost Ever FoundBestDelay(it)=BestSol.TotalDelay;% Show Iteration Informationdisp([' Iteration ' num2str(it) ': Best TotalDelay = ' num2str(BestDelay(it))]);fprintf('\n')disp('Green Timings:');fprintf('\n')disp([' North Green time = ' num2str(BestSol.GreenNSWE(1))'' ' seconds']);fprintf('\n')disp([' South Green time = ' num2str(BestSol.GreenNSWE(2))'' ' seconds']);fprintf('\n')disp([' West Green time = ' num2str(BestSol.GreenNSWE(3))'' ' seconds']);fprintf('\n')disp([' East Green time = ' num2str(BestSol.GreenNSWE(4))'' ' seconds']);fprintf('\n')%end of generationenddisp(' ****************************************************************' );disp(' CASE: Every 5 seconds 2 vehicles leaves the corresponding road ' );disp(' Expected vehicles left through North road' );disp(round(2*BestSol.GreenNSWE(1)/carpass));disp(' Expected vehicles left through South road' );disp(round(2*BestSol.GreenNSWE(2)/carpass));disp(' Expected vehicles left through West road' );disp(round(2*BestSol.GreenNSWE(3)/carpass));disp(' Expected vehicles left through East road' );disp(round(2*BestSol.GreenNSWE(4)/carpass));fprintf('\n')disp(' ****************************************************************' );disp(['Cycle Time = ' num2str(current_cycle)'' ' seconds']);%% Results / Plotsfigure(1);semilogy(BestDelay,'LineWidth',2);% plot(BestCost,'LineWidth',2);xlabel('Iteration');ylabel('Total Delay');grid on;toc
❤️ 运行结果
⛄ 参考文献
[1]林云.基于遗传算法的十字路口交通信号灯配时优化[J].技术与市场, 2011, 18(2):2.DOI:10.3969/j.issn.1006-8554.2011.02.001.
















 329
329











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











