







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
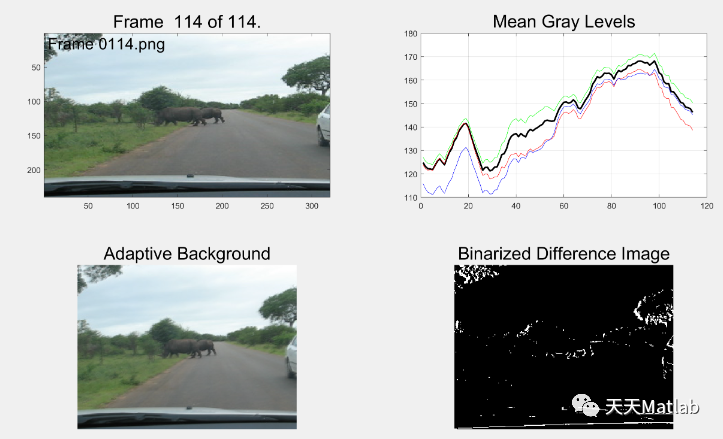
在当今数字媒体的时代,影片制作和处理技术正在不断发展和创新。其中一个重要的方面是重建新影片并进行图像处理。本文将探讨如何重建新影片,并计算颜色通道的平均灰度值,以及如何检测每一帧与前一帧之间的差异。
首先,让我们来了解一下重建新影片的概念。重建新影片是指通过对已有的影片进行处理和编辑,生成一个全新的影片。这个过程通常涉及到剪辑、调整色彩和对比度、添加特效等步骤。重建新影片可以让制作人员在后期制作阶段对影片进行更多的修改和优化,以达到更好的视觉效果和故事表达。
在重建新影片的过程中,计算颜色通道的平均灰度值是一个重要的步骤。颜色通道的平均灰度值可以帮助我们了解图像的整体亮度和对比度。通过计算每个像素点的红、绿、蓝三个通道的灰度值,并求取其平均值,我们可以得到图像的平均灰度值。这个数值可以作为后续处理的参考,例如调整图像的亮度和对比度,或者进行图像增强。
接下来,让我们来探讨如何检测每一帧与前一帧之间的差异。在影片中,连续的帧之间通常会有微小的差异。这些差异可能是由于相机的晃动、物体的移动或者光照的变化引起的。通过检测帧与前一帧之间的差异,我们可以更好地理解影片中的动态变化,并进行相应的处理和调整。
为了检测帧与前一帧之间的差异,我们可以使用图像处理算法和技术。其中一个常用的方法是计算两个帧之间的像素差异,并将差异值可视化。通过比较每个像素点的颜色值,我们可以得到两个帧之间的差异图像。这个差异图像可以帮助我们快速定位到影片中的变化区域,并进行进一步的处理和修正。
总结起来,重建新影片并计算颜色通道的平均灰度值,以及检测帧与前一帧之间的差异,是影片制作和处理中的重要步骤。这些步骤可以帮助我们优化影片的视觉效果和故事表达,使观众获得更好的观影体验。随着技术的不断发展,我们可以期待在未来更多创新的影片制作和处理技术的出现。
📣 部分代码
% SeismicAnalysis_3DFrames_Ex02%----------------------------------------------------------------% PURPOSE% To compute the Dynamic Non-Linear Seismic analysis for a% 3D Reinforced Concrete Frame.%%----------------------------------------------------------------% Notes: There is the option to extract the topology of the% structure from a SAP2000 model by using the SM Toolbox.%% To download the SM Toolbox visit:% https://github.com/RJ-Soft/SM-Toolbox/releases/tag/7.0.2%----------------------------------------------------------------%% LAST MODIFIED: L.F.Veduzco 2023-06-13% Faculty of Engineering% Autonomous University of Queretaro%----------------------------------------------------------------clear allclc%% Topology and node coordinates%{% OOPTION 2: Imported from a SAP2000 model (the SM Toolbox is required)APIDLLPath ='C:\Program Files\Computers and Structures\SAP2000 22\SAP2000v1.dll';ProgramPath ='C:\Program Files\Computers and Structures\SAP2000 22\SAP2000.exe';ModelName = 'Frame_Ex01.sdb';ModelPath = fullfile('C:\Users\luizv\OneDrive\SeismicAnalysis_3DFrames\StaticModalAnalysis\FrameSAP2000_Ex02',ModelName);[coordxyz,NiNf]=ExtractTopologySAP2000(ProgramPath,APIDLLPath,...ModelPath);coordxyz=coordxyz*2.54; % to change the location coordinates from in to cm%}% OPTION 1: Coordinates and connectivity manually givenNiNf=[1,2;2,3;3,4;3,5;5,6;7,8;8,9;9,10;9,11;11,12;8,2;9,3;11,5;2,13;13,14;14,3;14,15;15,5;8,16;16,17;17,9;17,18;18,11;16,13;17,14;18,15;13,19;19,20;20,14;20,21;21,15;16,22;22,23;23,17;23,24;24,18;22,19;23,20;24,21];coordxyz=[0,0,0;0,0,118.110236220472;137.795275590551,0,118.110236220472;137.795275590551,0,0;393.700787401575,0,118.110236220472;393.700787401575,0,0;0,157.480314960630,0;0,157.480314960630,118.110236220472;137.795275590551,157.480314960630,118.110236220472;137.795275590551,157.480314960630,0;393.700787401575,157.480314960630,118.110236220472;393.700787401575,157.480314960630,0;0,0,236.220472440945;137.795275590551,0,236.220472440945;393.700787401575,0,236.220472440945;0,157.480314960630,236.220472440945;137.795275590551,157.480314960630,236.220472440945;393.700787401575,157.480314960630,236.220472440945;0,0,354.330708661417;137.795275590551,0,354.330708661417;393.700787401575,0,354.330708661417;0,157.480314960630,354.330708661417;137.795275590551,157.480314960630,354.330708661417;393.700787401575,157.480314960630,354.330708661417]*2.54;nnodes=length(coordxyz(:,1));nbars=39;% Topology matrixni=NiNf(:,1);nf=NiNf(:,2);Edof=zeros(nbars,13);for i=1:nbarsEdof(i,1)=i;Edof(i,2)=ni(i)*6-5;Edof(i,3)=ni(i)*6-4;Edof(i,4)=ni(i)*6-3;Edof(i,5)=ni(i)*6-2;Edof(i,6)=ni(i)*6-1;Edof(i,7)=ni(i)*6;Edof(i,8)=nf(i)*6-5;Edof(i,9)=nf(i)*6-4;Edof(i,10)=nf(i)*6-3;Edof(i,11)=nf(i)*6-2;Edof(i,12)=nf(i)*6-1;Edof(i,13)=nf(i)*6;end%% Materials% f'c of each elementfc1=300;fpc=zeros(nbars,1)+fc1;% Elasticity modulus of each element in function of f'cE=14000.*sqrt(fpc);v1=0.2;v=zeros(nbars,1)+v1; % Poisson modulusG=E./(2.*(1+v)); % Shear modulus%% Geometry% cross-section dimensions of each element (rectangular geometry)dimensions=[30 30;25 40;30 30;25 40;30 30;30 30;25 40;30 30;25 40;30 30;25 40;25 40;25 40;30 30;25 40;30 30;25 40;30 30;30 30;25 40;30 30;25 40;30 30;25 40;25 40;25 40;30 30;25 40;30 30;25 40;30 30;30 30;25 40;30 30;25 40;30 30;25 40;25 40;25 40];% cross-section area of each elementA=dimensions(:,1).*dimensions(:,2);% Cross-section inertiaIy=1/12.*dimensions(:,1).*dimensions(:,2).^3;Iz=1/12.*dimensions(:,2).*dimensions(:,1).^3;adim=dimensions(:,2).*0.5;bdim=dimensions(:,1).*0.5;% Saint Venant constant (polar inertia - Torsion)J=adim.*bdim.^3.*(16/3-3.36.*bdim./adim.*(1-bdim.^4./(12.*adim.^4)));%% Prescribed boudnary conditions [dof, displacement]bc=[1 0;2 0;3 0;4 0;5 0;6 0;19 0;20 0;21 0;22 0;23 0;24 0;31 0;32 0;33 0;34 0;35 0;36 0;37 0;38 0;39 0;40 0;41 0;42 0;55 0;56 0;57 0;58 0;59 0;60 0;67 0;68 0;69 0;70 0;71 0;72 0];%% Additional data (optional)type_elem=[1 "Col";2 "Beam";3 "Col";4 "Beam";5 "Col";6 "Col";7 "Beam";8 "Col";9 "Beam";10 "Col";11 "Beam";12 "Beam";13 "Beam";14 "Col";15 "Beam";16 "Col";17 "Beam";18 "Col";19 "Col";20 "Beam";21 "Col";22 "Beam";23 "Col";24 "Beam";25 "Beam";26 "Beam";27 "Col";28 "Beam";29 "Col";30 "Beam";31 "Col";32 "Col";33 "Beam";34 "Col";35 "Beam";36 "Col";37 "Beam";38 "Beam";39 "Beam";];elemcols=[];elembeams=[];beams=0;cols=0;for j=1:nbarsif type_elem(j,2)=="Beam"beams=beams+1;elembeams=[elembeams,j];elseif type_elem(j,2)=="Col"cols=cols+1;elemcols=[elemcols,j];endend%% Local z axis of each elementfor i=1:nbarsif type_elem(i,2)=="Col"eobars(i,:)=[0 1 0];elseeobars(i,:)=[0 0 1];endend%% Loadsbeams_LL=-50; % Uniformly distributed loads over the beams% Assignation of distributed loads on beamsqbarxyz=zeros(nbars,4);qbarxyz(elembeams',3)=beams_LL;%% Mode of vibration of interestmodal=2; % 2 -> acceleration in the x direction% 1 -> acceleration in the y direction%% Damping matrix (for the damped case)omega1=3; % Frequenciesomega2=5;zeta1=0.25; % Damping factorszeta2=0.2;D=[1/(2*omega1) omega1/2;1/(2*omega2) omega2/2];theta=[zeta1;zeta2];RayCoeff=D\theta; % Rayleigh coefficients%% Modal analysispvconc=0.0024; % unit weight of concreteunitWeightElm=zeros(nbars,1)+pvconc;% Consistent mass method[Cgl,Mgl,Kgl]=SeismicModalMDOF3DFrames(coordxyz,A,unitWeightElm,qbarxyz,...eobars,Edof,E,G,J,Iy,Iz,NiNf(:,1),NiNf(:,2),g,RayCoeff);Dof=zeros(nnodes,6);for i=1:nnodesDof(i,1)=6*i-5;Dof(i,2)=6*i-4;Dof(i,3)=6*i-3;Dof(i,4)=6*i-2;Dof(i,5)=6*i-1;Dof(i,6)=6*i;end[Ex,Ey,Ez]=coordxtr(Edof,coordxyz,Dof,2);%% Dynamic analysis% Seismic response spectrum from the CFE-15g=981; % gravity accelerationFsit=2.4; FRes=3.8; % Factores de sitio y de respuestaa0_tau=9; % cm/seg^2ro=0.8; % Redundance factoralf=0.9; % Irregularity factorQ=4; % Seismic behaviour factorTa=0.1;Tb=0.6;Te=0.5; % Structure's periodk=1.5; % Design spectrum slopeQp=1+(Q-1)*sqrt(Te/(k*Tb)); % Ductility factorRo=2.5; % Over-resistance indexR=Ro+1-sqrt(Te/Ta); % Over-resistance factorsa=-a0_tau*Fsit*FRes/(R*Qp*alf*ro); % Reduced pseudo-acceleration (cm/seg^2)% Time discretizationdt=0.05;ttotal=10;t=0:dt:ttotal;npoints=length(t);% Ground acceleration historytload=1.5; % duration of external excitationg=sa*cos(5*t); % Acceleration in timefor i=1:length(g)if t(i)>3*tloadg(i)=10*cos(30*t(i));endendfigure(1)grid onplot(t,g,'b -','LineWidth',1.8)hold onxlabel('Time (sec)')ylabel('Acceleration (Kg/cm^2)')title('Ground acceleration in time')nodeHist=[2 13 19];dofhist=nodeHist*6-5; % dof to evaluate% Forces historyf=zeros(6*nnodes,npoints+1);for i=1:npoints% Modal analysis without Damping[f(:,i+1),Ts(:,i),Lai(:,i),Egv]=ModalsMDOF3DFrames(Mgl,Kgl,...bc,g(i),modal);end%% Plot of the modal in question and its frequencyFreq=1./Ts(:,1);zc=0.5*max(coordxyz(:,3));if length(modal)==1 % If only one modal was enteredfigure(6)% Undeformed structuregrid onNoteMode=num2str(modal);title(strcat('Eigenmode ','- ',NoteMode))elnum=Edof(:,1);plotpar=[1,2,1];eldraw3(Ex,Ey,Ez,plotpar,elnum)% Deformed structuremagnfac=100;Edb=extract(Edof,Egv(:,modal));plotpar=[1,3,1];[magnfac]=eldisp3(Ex,Ey,Ez,Edb,plotpar,magnfac);FreqText=num2str(Freq(modal));NotaFreq=strcat('Freq(Hz)= ',FreqText);text(50,zc,NotaFreq);end% Analysis in time with viscous dampingbeta=0.25;gamma=0.5;d0=zeros(6*nnodes,1);v0=zeros(6*nnodes,1);% Solving the motion equation with the Newmark-Beta method% Initial elements' end support conditionssupport=[1 "Fixed" "Fixed";2 "Fixed" "Fixed";3 "Fixed" "Fixed";4 "Fixed" "Fixed";5 "Fixed" "Fixed";6 "Fixed" "Fixed";7 "Fixed" "Fixed";8 "Fixed" "Fixed";9 "Fixed" "Fixed";10 "Fixed" "Fixed";11 "Fixed" "Fixed";12 "Fixed" "Fixed";13 "Fixed" "Fixed";14 "Fixed" "Fixed";15 "Fixed" "Fixed";16 "Fixed" "Fixed";17 "Fixed" "Fixed";18 "Fixed" "Fixed";19 "Fixed" "Fixed";20 "Fixed" "Fixed";21 "Fixed" "Fixed";22 "Fixed" "Fixed";23 "Fixed" "Fixed";24 "Fixed" "Fixed";25 "Fixed" "Fixed";26 "Fixed" "Fixed";27 "Fixed" "Fixed";28 "Fixed" "Fixed";29 "Fixed" "Fixed";30 "Fixed" "Fixed";31 "Fixed" "Fixed";32 "Fixed" "Fixed";33 "Fixed" "Fixed";34 "Fixed" "Fixed";35 "Fixed" "Fixed";36 "Fixed" "Fixed";37 "Fixed" "Fixed";38 "Fixed" "Fixed";39 "Fixed" "Fixed"];% Elastic resistant bending moments for each element's endsMp=[5030800 5003800;3630000 276940;3190000 1190000;3000000 5769400;4630000 30076940;8380000 1380000;4630000 4769400;9000000 5001090;5030800 5003800;363000 276940;3190000 1190000;300000 57694000;4630000 3007694;5030800 5003800;3630000 276940;3190000 1190000;3000000 5769400;4630000 30076940;8380000 1380000;4630000 4769400;9000000 5001090;5030800 5003800;363000 276940;3190000 1190000;300000 57694000;4630000 3007694;5030800 5003800;3630000 276940;3190000 1190000;3000000 5769400;4630000 30076940;8380000 1380000;4630000 4769400;9000000 5001090;5030800 5003800;363000 276940;3190000 1190000;300000 57694000;4630000 3007694]*10; % Kg-cmmpbar=zeros(nbars,2); % to save the plastic moments at each articulation% of each bar as plastifications occurplastbars=zeros(2,nbars);% Non-Linear Newmark-Beta[Dsnap,D,V,A,elPlasHist]=MDOFNewmarkBetaNonLinear3DFrames(Kgl,Cgl,Mgl,d0,...v0,dt,beta,gamma,t,f,dofhist,bc,RayCoeff,qbarxyz,A,Mp,E,G,Iy,Iz,J,...coordxyz,ni,nf,eobars,support,mpbar,plastbars);%% Dynamic displacement analysis per DOFfigure(2)grid onplot(t,D(1,:),'b -','LineWidth',1.8)grid onlegend(strcat('DOF-',num2str(dofhist(1))))hold onfor i=2:length(dofhist)plot(t,D(i,:),'LineWidth',1.8,'DisplayName',...strcat('DOF-',num2str(dofhist(i))))endhold onxlabel('Time (sec)')ylabel('Displacements (cm)')title('Displacements in time per DOF')%% Deformation history of structuresdtstep=5;Xc=max(coordxyz(:,1));Yc=max(coordxyz(:,2));Zc=max(coordxyz(:,3));figure(3)axis('equal')axis offsfac=10; % This is the scale factor for the plotting of the deformed% structures.title(strcat('Deformed structures in time. Scale x ',num2str(sfac)))for i=1:5Ext=Ex+(i-1)*(Xc+400);plotpar=[1,2,1];elnum=Edof(:,1);%eldraw3(Ext,Ey,Ez,plotpar,elnum);Edb=extract(Edof,Dsnap(:,dtstep*i-(dtstep-1)));plotpar=[1,3,1];eldisp3(Ext,Ey,Ez,Edb,plotpar,sfac);Time=num2str(t(5*i-4));NotaTime=strcat('Time(seg)= ',Time);text((Xc+400)*(i-1)+50,150,NotaTime);endEyt=Ey-(Yc+1000);for i=6:10Ext=Ex+(i-6)*(Xc+400);plotpar=[1,2,1];elnum=Edof(:,1);%eldraw3(Ext,Eyt,Ez,plotpar,elnum);Edb=extract(Edof,Dsnap(:,dtstep*i-(dtstep-1)));plotpar=[1,3,1];[sfac]=eldisp3(Ext,Eyt,Ez,Edb,plotpar,sfac);Time=num2str(t(5*i-4));NotaTime=strcat('Time(seg)= ',Time);text((Xc+400)*(i-6)+50,-250,NotaTime)end% ----------------------------- End ----------------------------------
⛳️ 运行结果
🔗 参考文献
[1] 刘慧,刘学斌,陈小来,等.基于驱动时序控制CCD曝光时间的设计与实现[J].红外与激光工程, 2015, 44(S1):199-204.DOI:10.3969/j.issn.1007-2276.2015.z1.037.
[2] 唐诗.基于多尺度变换的无源毫米波图像融合算法研究[D].电子科技大学[2023-09-22].
















 5277
5277











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











