







 文章介绍了三角定位法和“三点定圆”双站交叉定位法在无人机定位中的应用。三角定位法依赖于至少三个观测站测量角度来确定无人机坐标,而三点定圆法通过两个观测站的夹角计算目标可能的位置。此外,还提及了粒子群算法在优化问题中的作用,如调整无人机位置以接近理想位置。
文章介绍了三角定位法和“三点定圆”双站交叉定位法在无人机定位中的应用。三角定位法依赖于至少三个观测站测量角度来确定无人机坐标,而三点定圆法通过两个观测站的夹角计算目标可能的位置。此外,还提及了粒子群算法在优化问题中的作用,如调整无人机位置以接近理想位置。
目录
遂行飞行 指多个无人机顺序完成规定路径
介绍一下三角形定位法
三角定位法是一种常见的定位方法,通过测量目标与不同位置的观测站之间的角度信息,来确定目标的位置。在无人机定位中,三角定位法可以用于计算无人机的坐标。
基本原理是通过至少三个观测站(具有已知位置)测量无人机与观测站之间的角度,然后利用三角学原理计算出无人机的坐标。这些角度可以通过测量无人机与每个观测站之间的方向或者水平角度来获取。这种方法基于以下原理:
-
三角形内角和定理:在一个三角形中,三个内角的和为180度。
-
三角形的正弦定理:在一个三角形中,边与角之间的关系可以用正弦定理表示。
根据观测站的位置和测量得到的角度信息,可以建立一个方程组,通过解方程组得到无人机的坐标。这种方法适用于具有良好可见性和角度测量精度的情况。
在给定的无人机编队中,可以使用多个观测站来测量无人机与观测站之间的角度,然后利用三角定位法计算每个无人机的坐标。通过使用多个观测站,可以提高定位的准确性和鲁棒性。
总的来说,三角定位法是一种基于测量角度信息的定位方法,适用于无人机等目标的定位。它可以通过计算角度和使用三角学原理来确定目标的位置坐标。
1 部分主要目的为
为接下里的运算做基本的数学定义
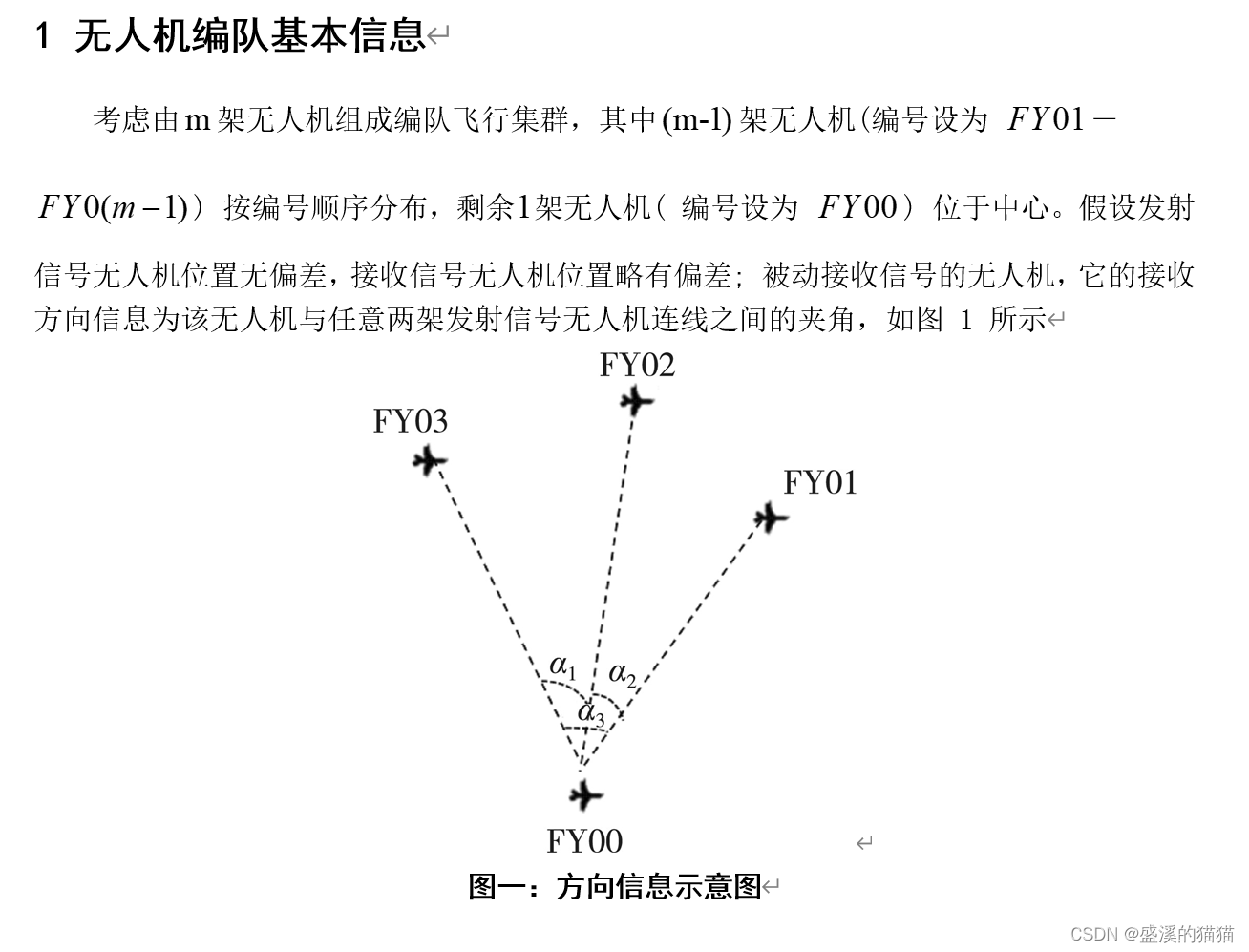
“三点定圆”双站交叉定位法是什么?
"三点定圆"双站交叉定位法是一种基于三角定位原理的定位方法,通过两个观测站同时测量目标与各观测站之间的角度,来确定目标的位置。该方法主要应用于二维平面上的定位问题。
基本原理是通过两个观测站(观测站A和观测站B)测量目标与观测站之间的角度,然后利用三角定位原理计算出目标可能所在的圆的位置。具体步骤如下:
-
观测站A和观测站B同时测量目标与各自观测站之间的角度。
-
根据三角定位原理,每个观测站可以得到一个圆的方程,其中圆心是未知的目标位置。
-
通过观测站A和观测站B的测量结果,可以建立一个方程组,包含两个圆的方程。这个方程组可以求解出两个可能的圆心位置,这两个位置就是目标可能所在的位置。
-
根据实际情况和额外信息,可以通过进一步的筛选或计算来确定目标的准确位置。
"三点定圆"双站交叉定位法通常使用两个观测站进行定位,因此在实际应用中要求观测站之间的距离足够远,以提高测量的准确性和可靠性。同时,这种方法也对观测站的位置精确度要求较高。
总的来说,"三点定圆"双站交叉定位法利用两个观测站同时测量目标与各观测站之间的角度,通过三角定位原理计算出目标可能所在的圆的位置,从而实现目标的定位。
这段代码实现了一些函数和过程来处理无人机的定位问题。让我逐步解释每个部分的功能和作用:
-
导入库:
import numpy as np: 导入NumPy库,用于进行数值计算和数组操作。import cmath: 导入cmath库,用于进行复数运算和极坐标转换。import random: 导入random库,用于生成随机数。import matplotlib.pyplot as plt: 导入matplotlib.pyplot库,用于绘制图表和可视化。
-
函数定义:
calc_distance(drone_1, drone_2): 计算任意两架无人机之间的距离。calc_angle(drone_recipient, drone_sender_1, drone_sender_2): 使用余弦定理计算夹角。cost(angle1, angle2): 计算两组夹角之间的成本。cost_one(angle1, angle2): 计算单个夹角与目标夹角之间的成本。plot_location(location): 绘制无人机的位置图表。
-
数据准备:
drone_location_polar: 表示无人机位置的极坐标列表。drone_ideal_location_polar: 表示无人机理想位置的极坐标列表。drone_location_cartesian和drone_ideal_location_cartesian: 分别用于存储无人机位置和理想位置的直角坐标。
-
坐标转换:
polar_to_cartesian(location): 将极坐标转换为直角坐标。cartesian_to_polar(location): 将直角坐标转换为极坐标。
-
位置调整:
adjust_location(drone_testing_location, drone_sender_id): 根据夹角和理想位置调整无人机的位置。
-
主程序:
drone_testing_location: 初始化测试无人机位置的列表。for i in range(5): 循环5次进行位置调整。print("调整后无人机极坐标"): 打印调整后的无人机极坐标。
代码的主要目标是根据无人机之间的夹角和理想位置进行位置调整,以使得无人机的位置更接近理想位置。通过计算夹角和调整位置,代码尝试优化无人机的位置,以使得无人机与理想位置的距离最小化。最后,输出调整后的无人机位置极坐标。

余弦定理,欧氏平面几何学基本定理。余弦定理是描述三角形中三边长度与一个角的余弦值关系的数学定理,是勾股定理在一般三角形情形下的推广,勾股定理是余弦定理的特例。余弦定理是揭示三角形边角关系的重要定理,直接运用它可解决一类已知三角形两边及夹角求第三边或者是已知三个边求三角的问题,若对余弦定理加以变形并适当移于其它知识,则使用起来更为方便、灵活。
介绍一下粒子群算法
粒子群算法(Particle Swarm Optimization,PSO)是一种优化算法,受到鸟群觅食行为的启发而提出。它模拟了鸟群在搜索食物时的群体协作行为,并通过不断迭代来寻找最优解。
在粒子群算法中,问题的解被表示为一个多维空间中的粒子群。每个粒子代表一个解,并在解空间中搜索最优解。粒子通过迭代的方式逐渐调整自身的位置和速度,以寻找更好的解。
粒子群算法的基本思想如下:
-
初始化粒子群:随机生成一组粒子的初始位置和速度。
-
评估适应度:根据问题的目标函数,计算每个粒子的适应度值。
-
更新粒子的最佳位置和全局最佳位置:对于每个粒子,根据其当前位置和历史最佳位置,更新其个体最佳位置。同时,根据所有粒子的适应度值,更新全局最佳位置。
-
更新粒子的速度和位置:根据粒子的速度和位置更新公式,调整粒子的速度和位置。这个过程使得粒子向全局最佳位置和个体最佳位置进行搜索。
-
重复步骤2至4,直到满足停止条件(例如达到最大迭代次数或达到目标精度)。
在更新粒子速度和位置的过程中,粒子的速度和位置受到以下因素的影响:
-
个体经验:粒子自身历史上的最佳位置,使得粒子倾向于向个体最佳位置移动。
-
群体经验:全局最佳位置,使得粒子倾向于向全局最佳位置移动。
-
随机性:引入随机因素,使得粒子具有一定的探索能力。
通过不断迭代和更新,粒子群算法能够逐步收敛到最优解或接近最优解。它在求解连续优化问题、寻找函数最小值或最大值等方面具有广泛的应用。
当然!让我具体解释一下这段代码的实现逻辑:
-
首先,代码导入了所需的库,包括NumPy(用于数值计算和数组操作)、cmath(用于复数运算和极坐标转换)、random(用于生成随机数)和matplotlib.pyplot(用于绘图)。
-
接下来,定义了几个函数:
-
calc_distance(drone_1, drone_2):计算任意两架无人机之间的距离。这个函数使用了两点之间的距离公式。 -
calc_angle(drone_recipient, drone_sender_1, drone_sender_2):使用余弦定理计算三个点构成的夹角。该函数通过计算三角形的边长来求解夹角。 -
cost(angle1, angle2):计算两组夹角之间的成本。这里使用了平方差来度量两组夹角的差异。 -
cost_one(angle1, angle2):计算单个夹角与目标夹角之间的成本。这里使用绝对值来度量夹角的差异。 -
plot_location(location):绘制无人机的位置图表。这个函数用于可视化无人机的位置。
-
-
然后,准备了一些数据:
-
drone_location_polar:表示无人机位置的极坐标列表。 -
drone_ideal_location_polar:表示无人机理想位置的极坐标列表。 -
drone_location_cartesian和drone_ideal_location_cartesian:分别用于存储无人机位置和理想位置的直角坐标。
-
-
进行坐标转换:
-
polar_to_cartesian(location):将极坐标转换为直角坐标。这个函数使用三角函数来进行坐标转换。 -
cartesian_to_polar(location):将直角坐标转换为极坐标。这个函数使用了cmath库中的polar函数来进行转换。
-
-
定义了一个名为
adjust_location的函数,用于调整无人机的位置。-
在这个函数中,首先计算了无人机当前位置与理想位置之间的距离和。
-
然后,通过遍历其他无人机,计算其与两个发送信号的无人机之间的夹角,并根据夹角和理想位置调整无人机的位置。
-
调整后,计算调整后的其他无人机与理想位置之间的距离和,并进行输出。
-
-
主程序部分包含以下步骤:
-
初始化一个名为
drone_testing_location的列表,用于存储测试无人机位置。 -
使用循环对无人机位置进行5次调整。
-
在每次调整中,调用
adjust_location函数,传递当前的无人机位置列表和发送信号的无人机编号(1)。 -
最后,将调整后的无人机位置转换为极坐标,并进行输出。
-
需要注意的是,代码中缺少一个名为get_location_from_angle的函数的实现。这个函数可能在代码的其他部分实现了,但在提供的代码片段中没有包含。因此,无法完全理解和执行与此函数相关的代码段。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









