






实验2:单周期MIPS处理器
所有源代码见我的仓库
1 实验目的
- 熟悉Vivado软件;
- 熟悉在Vivado软件下进行硬件设计的流程;
- 设计单周期MIPS处理器,包括
- 完成单周期MIPS处理器的设计;
- 在Vivado软件上进行仿真;
- 编写MIPS代码验证单周期MIPS处理器;
- 在NEXYS4 DDR板上进行验证
2实验内容
2.1 设计单周期mips处理器
实验结果
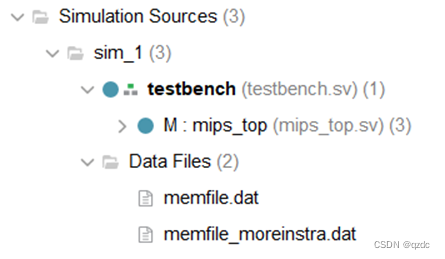
完成对与所有要求的指令的支持,封装为顶层文件,文件结构如下:
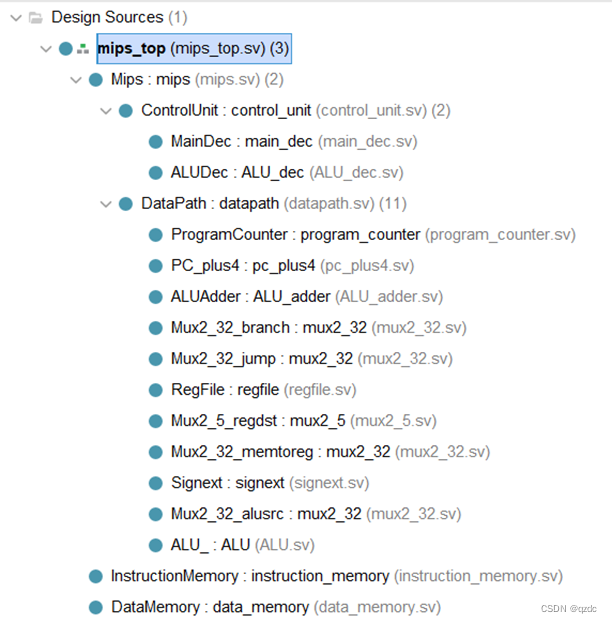
具体实现
本阶段主要参考ppt和《数字设计》一书。
最终的RTL图如下:
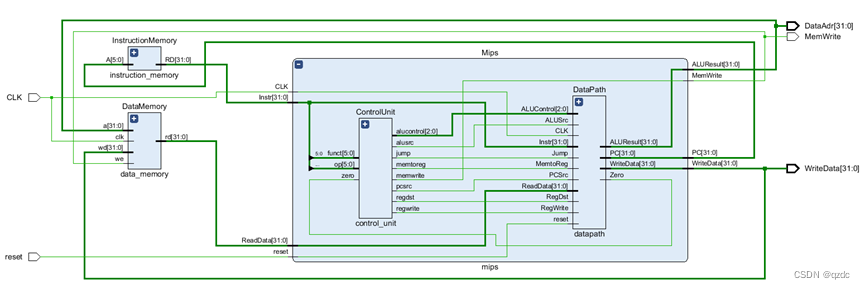
首先实现PC寄存器、指令存储器和数据存储器和寄存器文件。
pc寄存器是一个带异步复位信号的D触发器,复位时置零,在时钟上升沿将输入的pc_next赋值给输出pc:
always@(posedge clk, posedge res)
begin
if(res)
pc<=0;
else
pc<=pc_next;
end
指令寄存器需要一块64*32bits的的空间,根据输入的地址A输出相应位置的指令。在激励信号的作用下,会在开始时读入需要的指令文件。注意到由于A每次自增1,就代表取得下一条指令,所以在输入时将8位pc的最后2位(始终为0)丢弃,就可以在pc实际自增4时变为只会自增1
logic [31:0] RAM[63:0];
initial
begin
$readmemh("memfile_moreinstra.dat",RAM);
end
assign RD=RAM[A];
数据存储器(内存)也需要64*32bits的大小,根据读入的a,输出相应的内容。并且在写使能为真时,时钟上升沿时对地址为a的数据进行写入。
logic [31:0] RAM[63:0];
assign rd=RAM[a[31:2]];
always_ff@(posedge clk)
if(we)
RAM[a[31:2]]<=wd;
寄存器文件开辟32*32bit的空间。在时钟上升沿时,如果寄存器写使能为真,就对相应的寄存器写入数据。两个输出与两个输入地址相匹配,并且输入地址为0时始终返回0
logic [31:0] rf[31:0];
always_ff@(posedge clk)
if(we3==1)
rf[wa3]<=wd3;
assign rd1=(ra1!=0)?rf[ra1]:0;
assign rd2=(ra2!=0)?rf[ra2]:0;
接下来是根据lw指令,来对上述模块连接。由于lw指令需要一个加法器件,于是使用先增加一个ALU模块,根据ALUControl的取值做出相应的运算。首先实现加法,对应位010。同时还需要实现sub、and、or、slt。同时为了后面beq和bne指令,还需要一个Zero标志位,在运算结果为0时置1
always@(*)
begin
case(ALUControl)
3'b000: ALUResult <= A&B;
3'b001: ALUResult <= A|B;
3'b010: ALUResult <= A+B;
3'b110: ALUResult <= A-B;
3'b111: ALUResult <= A<B ? 1:0;//slt
3'b101:ALUResult <= ~(A|B);
default: ALUResult <= 0;
endcase
end
assign Zero = (ALUResult==0);
然后需要对读入的立即数做出符号扩展,由16位扩展至32位。就是将最高位重复16次并与原数拼接。
接下来开始按照lw指令的数据流连接各个部件,由于需要写回寄存器,所以需要寄存器RegWrite写使能参与。并且再加上pc自增4的模块,用于更新pc。
然后对于sw指令的数据流,再次连接部件。由于需要写入内存,就增加内存写使能控制器MemWrite。
接下来是r型指令。由于需要写入寄存器,并且指令中写入寄存器的信息与之前lw写入寄存器的信息在Instra中位置不一样,于是需要一个二选一复用器,在RegDst的控制下选择合适的Intra部分作为写入寄存器。除此之外,ALU的第二个操作数也需要一个复用器,在ALUSrc的判断下选择是从寄存器中读出的数据还是Instra中的符号扩展结果。由于ALU运算结果直接作为结果写回寄存器,不需要经过内存,就再增加一个复用器,在MemtoReg控制下选择是从内存中读出的数据还是ALU的运算结果作为写回寄存器的内容。
上述的复用器有5位的,也有32位的,实验中用mux2_32和mux2_5来实现。
再对beq指令做出扩展。经过符号扩展的立即数左移两位后加上pc自增4后的结果作为PCBranch的内容。增加一个复用器,再PCSrc的控制下判断是选择正常PC自增4还是PCBranch作为新的PC。其中,这个加法没有使用ALU,而是用一个专门的部件来实现加法。
接下来完成控制器,由2部分组成,分别是主译码器和ALU译码器。
主译码器根据读入Instra的Opcode部分对于先前提到的RegWrite、RegDst、ALUSrc、Branch、MemWrite、MemtoReg做出控制,并产生ALUOp,在非R型指令时控制ALU的操作,当其为010时代表为R型指令。
ALU译码器读入Instra的funct段,根据主译码器产生的ALUOp,输出相应的ALUControl控制ALU。
由于还未实现全部指令,主译码器和ALU译码器的相关代码将在所有指令实现后展示。
随后将主译码器和ALU译码器封装为控制单元,其中输出的branch由ALU的Zero标志和Branch共同决定。
此时基本的CPU已经完成。现在开始拓展更多指令。
首先拓展addi指令,只用在主译码器中加入此指令即可,现有数据路径可以完成此操作。
然后是j指令。首先数据路径需要增加一个复用器,根据Jump控制真正的PC是来源于立即数经过左移和扩展得到的PCJump还是先前已存在的PC_next。同时还需要在主译码器、控制单元中增加新的输出项Jump。
对于andi、ori、slti指令,除了ALUOp不一样,其它输出信号完全与addi一致,在主译码器和ALU译码器中增加相应的语句即可实现。
对于bne指令,在控制单元中增加一个Branch_standard,当Zero标志位与Branch_standard相等时,并且Branch为1时,将PCSrc置为1,代表需要Branch。(这一点与ppt上的实现方法不一样)
最后是nop指令,不需进行任何操作,将所有控制单元全置为0即可。
至此,已完成对于所有指令的支持。主译码器和ALU译码器相关代码如下:
主译码器:
logic [9:0] control;
logic branch_standard;
assign {regwrite,regdst,alusrc,branch,memwrite,memtoreg,aluop,jump} = control;
always@(*)
case(op)
6'b000000: control<=10'b1100000100;//R
6'b100011: control<=10'b1010010000;//lw
6'b101011: control<=10'b0010100000;//sw
6'b000100: control<=10'b0001000010;//beq
6'b000101: control<=10'b0001000010;//bne
6'b000010: control<=10'b0000000001;//jump
6'b001000: control<=10'b1010000000;//addi
6'b001100: control<=10'b1010001000;//andi
6'b001101: control<=10'b1010001010;//ori
6'b001010: control<=10'b1010001100;//slti
6'b100000: control<=10'b0000000000;//nop
default: control<=10'bxxxxxxxxxx;
endcase
ALU译码器:
always@(*)
case(aluop)
3'b000: alucontrol<=3'b010;//+
3'b001: alucontrol<=3'b110;//-
3'b010:
case(funct)
6'b100000: alucontrol<=3'b010;
6'b100010: alucontrol<=3'b110;
6'b100100: alucontrol<=3'b000;
6'b100101: alucontrol<=3'b001;
6'b101010: alucontrol<=3'b111;
default: alucontrol<=3'bxxx;
endcase
3'b100:alucontrol<=3'b000;//andi
3'b101:alucontrol<=3'b001;//ori
3'b110:alucontrol<=3'b111;//slti
default:
alucontrol<=3'bxxx;
endcase
接下来进行模块的封装。
首先将和数据有关的模块封装到datapath里,与先前的控制单元一起封装为mips模块:
logic MemtoReg,Alusrc,RegDst,RegWrite,Jump,PCRsc,Zero;
logic [2:0]ALUControl;
control_unit ControlUnit(Instr[31:26],Instr[5:0],Zero,MemtoReg,MemWrite,
PCSrc,ALUSrc,RegDst,RegWrite,Jump,ALUControl);
datapath DataPath(CLK,reset,MemtoReg,PCSrc,ALUSrc,RegDst,
RegWrite,Jump,ALUControl,Zero,PC,Instr,ALUResult,WriteData,ReadData);
接着把mips模块和指令存储器、数据存储器封装至顶层文件mips_top中,完成MIPS指令CPU设计:
logic [31:0] PC,Instr,ReadData;
mips Mips(CLK,reset,PC,Instr,MemWrite,DataAdr,WriteData,ReadData);
instruction_memory InstructionMemory(PC[7:2],Instr);
data_memory DataMemory(CLK,MemWrite,DataAdr,WriteData,ReadData);
2.2 仿真
实验结果
仿真结果与预期结果一致。采用的第一个代码是《数字设计和计算机体系结构》书中的标准测试程序,第二个代码是ppt中的测试程序,并在其中添加nop指令(由于MIPS指令集中似乎没有nop指令,所以假定其操作码为100000),采用书中的testbench,得到的结果如下,与预期一致,得到success的反馈。
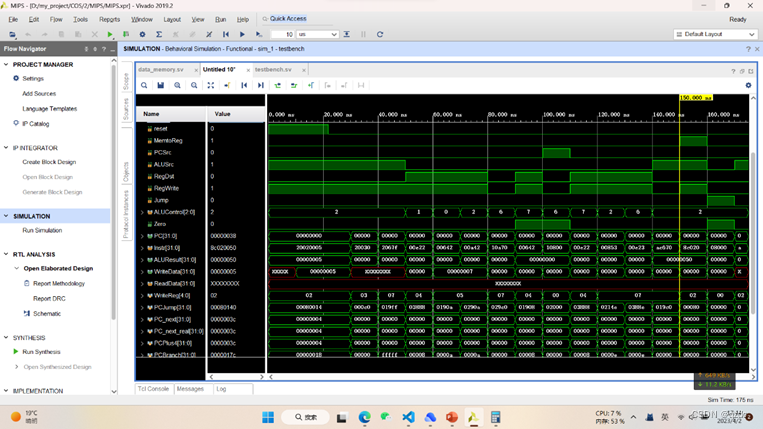
具体实现
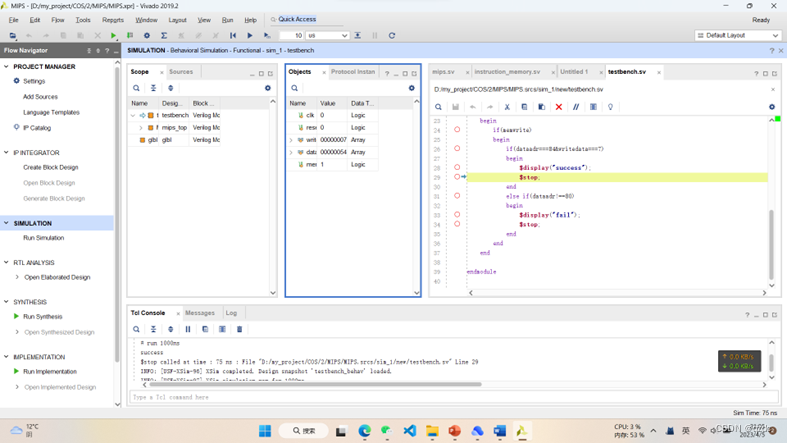
首先根据《数字设计》的标准测试代码与testbench文件经行仿真测试,Tcl Console得到success的反馈,波形图也与ppt上的结果一致。指令文件命名为memfile.dat。
接下来根据ppt上的测试代码,并加上一句nop指令,进行仿真测试,Tcl Console得到success的反馈,波形图也与ppt上的结果一致。指令文件命名为memfile_moreinstra.dat。
仿真的文件结构如下:
2.3 验证
实验结果
最终的代码文件结构如下:

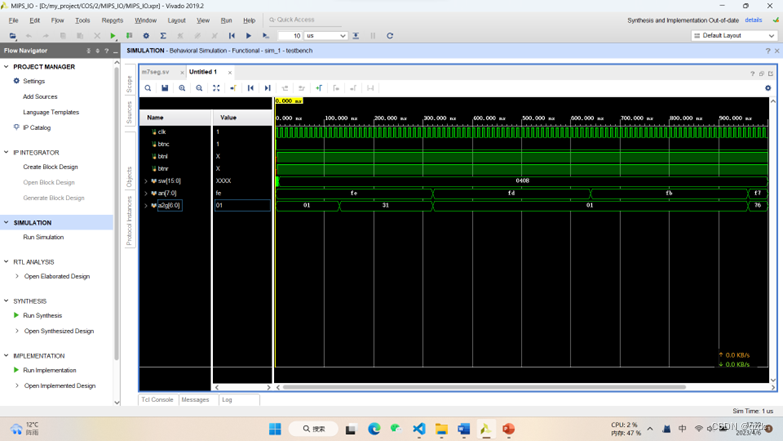
基于ppt上的testIO测试指令,实现两个数的相加,写出相应的testbench仿真文件,运行仿真后比较波形图,与ppt上的内容一致。波形图如下,数码管显示的内容分别为C00……,与预期结果一致:
具体实现
最终实现的RTL图如下:
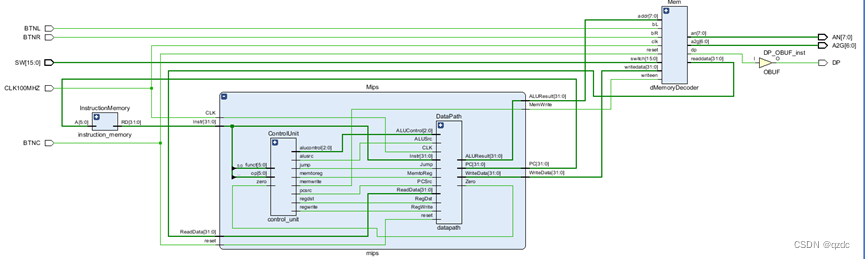
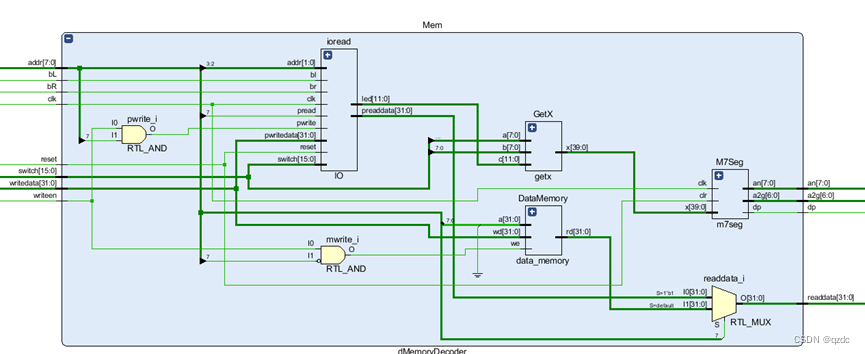
其中,Mem的内部展开如下:
首先新建另一个工程,命名为MIPS_IO,将原来MIPS模块的代码导入进该项目,再将测试的指令改为两个数相加的代码,命名为testIO.dat,用于仿真和生成bit文件。
接下来分析要求,按下BTNC重置,BTNR读入开关的高8位与低8位,作为两个加数,按下BTNL就输出相加的结果。
根据ppt上的原理图,对数据存储器进行修改,修改为数据存储器译码器,判断要读取的数据是来自于内存还是开关的输入。
设置一个两位变量status。按下了BTNR后,读入开关的数据,并将status高位置为1。按下了BTNL就输出两数相加的结果,将低位置为1。当IO输入的写使能为真,并且是向0x84(对应addr为01)写入数据时,就写入两数相加的结果,然后将status低位置为0。最后根据读使能判断是否需要读出数据,如果不需要读出就输出0,需要读就输出相应的值。于是得到如下代码:
IO.sv:
always_ff@(posedge clk)
begin
if(reset)
begin
status<=2'b00;
led1<=12'h00;
switch1<=16'h00;
end
else
begin
if(br)
begin
status[1]<=1'b1;
switch1<=switch;
end
if(bl)
begin
status[0]<=1'b1;
led<=led1;
end
if(pwrite&(addr==2'b01))
begin
led1<=pwritedata[11:0];
status[0]<=0;
end
end
end
always_comb
if(pread)
case(addr)
2'b11:preaddata={24'b0,switch1[15:8]};
2'b10:preaddata={24'b0,switch1[7:0]};
2'b00:preaddata={24'b0,6'b0,status};
default:preaddata=32'b0;
endcase
else
preaddata=32'b0;
接下来封装数据存储器译码器,在实例化原来的数据存储器和刚才完成的IO存储器后,还需要做一个简单的译码操作,就是根据MIPS的控制器输出的内存写使能MemWrite(这里命名为writeen,为避免引起混淆),和写入地址的最高位,判断是往内存里写入还是往IO存储器里写入,以及读出的数据是来自内存还是IO存储器。
除此之外,数据存储器译码器还需要实现对于七段数码管的显示支持,实例化getx模块后得到七段数码管需要显示的内容,实例化m7seg模块,进行相应的显示。
下面是封装后的数据存储器译码器的主要代码:
assign pwrite=writeen&addr[7];
assign mwrite=writeen&(~addr[7]);
data_memory DataMemory(CLK,mwrite,addr,writedata,readdata1);
IO ioread(clk,reset,addr[7],pwrite,addr[3:2],writedata,readdata2,bL,bR,switch,led);
assign readdata=addr[7]?readdata2:readdata1;
getx GetX(switch[15:8],switch[7:0],led,x);
m7seg M7Seg(x,clk,reset,an,a2g,dp);
getX模块就是根据开关的高位和低位,拼接输出的led,形成要显示的内容。本次实验最开始没有注意到直接是用二进制表示的,还编写了bin2bcd代码,用于实现最高12位二进制数字转换为十进制8421码的功能,但是最后没有启用。
assign x= {1'b0,a[7:4],1'b0,a[3:0],
1'b0,b[7:4],1'b0,b[3:0],
5'b10000,1'b0,c[11:8],
1'b0,c[7:4],1'b0,c[3:0]
};
最后是采用时钟分频器的分时复用法控制七段数码管的模块。其中控制位在仿真阶段取时钟计数器的5-7位,以在波形图上展示更多的信息,在仿真阶段取通常的17-19位,以保证七段数码管正常工作。由于这些代码在上学期《数字逻辑》课程中多次使用,并且篇幅较长,就不展示了。
至此,带IO接口的单周期MIPS处理器已通过仿真测试。
2.4 板上验证
将七段数码管的时钟分频器改为取第17-19位来降频,导入约束文件,生成bit文件成功后,就上板验证。验证结果是正常工作,实现了要求的功能,即按下BTNC重置,BTNR读入开关的高8位与低8位,作为两个加数,按下BTNL就输出相加的结果。验证的图片如下:

3 实验结论
本次实验通过使用system Verilog语言,在vivado软件上实现了单周期CPU的制作,支持add,sub,addi,and,or,andi,ori,slt,slti,sw,lw,beq,bne,j,nop指令,并封装为CPU模块,运行基础测试代码和扩展指令的测试代码均在仿真后通过测试。
之后通过结合所学知识,设计了带IO接口的单周期MIPS处理器,在运行指定的程序后,在仿真阶段通过测试,在导入约束文件后成功生成bit文件,再烧录入开发板后,按照既定的目标正常实现了相应的功能。
本实验第一阶段的单周期CPU命名为MIPS,第二阶段的带IO接口的单周期CPU命名为MIPS_IO
4 实验感想
本次实验的工作量比较大,涉及到的项目文件数比较多,如何清晰地区分、组织、封装这些文件模块还是很考验细心程度的。在编写代码的时候,往往会因为自己一个不小心,将always是时序逻辑还是组合逻辑搞错、对变量使用错误导致连线错误等等。尤其是在一开始从imem、dmem、regfile三大模块开始逐步向外扩展支持更多指令的时候,各种意想不到的连线错误,比如实例化时变量位置不对、连线时没区分变量大小写导致n\c、数组的位数发生错误等等,都导致了意想不到的问题。
解决办法是除了仔细地输入代码、使用变量之外,还在每个新指令添加后及时查看RTL图,看看有没有模块的输入输出是n\c的,或者被不小心接地了,这个操作虽然比较费事,但真的规避掉了好多问题。
印象最深的一个bug就是第一阶段最后仿真测试的时候,波形图和ppt几乎完全一样,但是就是显示fail,在RTL分析没有结果后,就只能把datapath添加到仿真的波形图里,一句一句指令读,看看是在哪一步出了问题。最后发现是sw指令中,数据存储器写入的时候,写入的并不是输入的writedata,而是输出的readdata。在改正后,终于正常运行,通过了测试。
不过毫无疑问,这次lab的作用是显著的。对于CPU的硬件实现各种指令的方式都有了比较深入的了解,特别是控制流、数据流相关的内容,以前都是抽象的名词,但是现在是真的理解到了其中的含义,这是不动手做所实现不了的。这次试验对于理解计算机软硬件交接的层面的有着极大的帮助。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









