






BPTT
- 一、习题6-1P 推导RNN反向传播算法BPTT.
- 二、习题6-2 推导公式 ∂ z k ∂ W \frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial W}} ∂W∂zk和公式 ∂ z k ∂ b \frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial b}} ∂b∂zk.
- 三、长程依赖问题
- 四、长程依赖问题的解决方案
- 五、习题6-3 当使用公式 h t = h t − 1 + g ( x t , h t − 1 , θ ) h_t=h_{t-1}+g\left( x_t,h_{t-1},\theta \right) ht=ht−1+g(xt,ht−1,θ) 作为循环神经网络的状态更新公式时, 分析其可能存在梯度爆炸的原因并给出解决方法.
- 六、习题6-2P 设计简单RNN模型,分别用Numpy、Pytorch实现反向传播算子,并代入数值测试.
一、习题6-1P 推导RNN反向传播算法BPTT.
BPTT算法将循环神经网络看作一个展开的多层前馈网络,其中“每一层”对应循环网络中的“每个时刻”。这样,循环神经网络就可以按照前馈网络中的反向传播算法计算参数梯度.在“展开”的前馈网络中,所有层的参数是共享的,因此参数的真实梯度是所有“展开层”的参数梯度之和。
在进行推导前,可以先看看课本的附录B,里面对矩阵求导、链式法则做了详细的解释。




T=1时:

∂
L
1
∂
U
=
∂
L
1
∂
y
1
^
∂
y
1
^
∂
h
1
∂
h
1
∂
z
1
∂
z
1
∂
U
\frac{\partial L_1}{\partial U}=\frac{\partial L_1}{\partial \widehat{y_1}}\frac{\partial \widehat{y_1}}{\partial h_1}\frac{\partial h_1}{\partial z_1}\frac{\partial z_1}{\partial U}
∂U∂L1=∂y1
∂L1∂h1∂y1
∂z1∂h1∂U∂z1
T=2时:

∂
L
2
∂
U
=
∂
L
2
∂
y
2
^
∂
y
2
^
∂
h
2
∂
h
2
∂
z
2
∂
z
2
∂
U
+
∂
L
2
∂
y
2
^
∂
y
2
^
∂
h
2
∂
h
2
∂
z
2
∂
z
2
∂
h
1
∂
h
1
∂
z
1
∂
z
1
∂
U
\frac{\partial L_2}{\partial U}=\frac{\partial L_2}{\partial \widehat{y_2}}\frac{\partial \widehat{y_2}}{\partial h_2}\frac{\partial h_2}{\partial z_2}\frac{\partial z_2}{\partial U}+\frac{\partial L_2}{\partial \widehat{y_2}}\frac{\partial \widehat{y_2}}{\partial h_2}\frac{\partial h_2}{\partial z_2}\frac{\partial z_2}{\partial h_1}\frac{\partial h_1}{\partial z_1}\frac{\partial z_1}{\partial U}
∂U∂L2=∂y2
∂L2∂h2∂y2
∂z2∂h2∂U∂z2+∂y2
∂L2∂h2∂y2
∂z2∂h2∂h1∂z2∂z1∂h1∂U∂z1
T=3时:

∂
L
3
∂
U
=
∂
L
3
∂
y
3
^
∂
y
3
^
∂
h
3
∂
h
3
∂
z
3
∂
z
3
∂
U
+
∂
L
3
∂
y
3
^
∂
y
3
^
∂
h
3
∂
h
3
∂
z
3
∂
z
3
∂
h
2
∂
h
2
∂
z
2
∂
z
2
∂
U
+
∂
L
3
∂
y
3
^
∂
y
3
^
∂
h
3
∂
h
3
∂
z
3
∂
z
3
∂
h
2
∂
h
2
∂
z
2
∂
z
2
∂
h
1
∂
h
1
∂
z
1
∂
z
1
∂
U
\frac{\partial L_3}{\partial U}=\frac{\partial L_3}{\partial \widehat{y_3}}\frac{\partial \widehat{y_3}}{\partial h_3}\frac{\partial h_3}{\partial z_3}\frac{\partial z_3}{\partial U}+\frac{\partial L_3}{\partial \widehat{y_3}}\frac{\partial \widehat{y_3}}{\partial h_3}\frac{\partial h_3}{\partial z_3}\frac{\partial z_3}{\partial h_2}\frac{\partial h_2}{\partial z_2}\frac{\partial z_2}{\partial U}+\frac{\partial L_3}{\partial \widehat{y_3}}\frac{\partial \widehat{y_3}}{\partial h_3}\frac{\partial h_3}{\partial z_3}\frac{\partial z_3}{\partial h_2}\frac{\partial h_2}{\partial z_2}\frac{\partial z_2}{\partial h_1}\frac{\partial h_1}{\partial z_1}\frac{\partial z_1}{\partial U}
∂U∂L3=∂y3
∂L3∂h3∂y3
∂z3∂h3∂U∂z3+∂y3
∂L3∂h3∂y3
∂z3∂h3∂h2∂z3∂z2∂h2∂U∂z2+∂y3
∂L3∂h3∂y3
∂z3∂h3∂h2∂z3∂z2∂h2∂h1∂z2∂z1∂h1∂U∂z1
同理可推广至任意时刻

注意:每一时刻的 h h h、 x x x都是一个
向量,而不是一个标量。

设输入层神经元有n个,隐层神经元有m个。
在第
t
时刻,求对
U
的导数:
∂
L
t
∂
U
=
∑
k
=
1
t
∂
z
k
∂
U
∂
L
t
∂
z
k
\mathbf{在第t时刻,求对U的导数:}\frac{\mathbf{\partial L}_{\mathbf{t}}}{\mathbf{\partial U}}=\sum_{\mathbf{k}=1}^{\mathbf{t}}{\frac{\mathbf{\partial z}_{\mathbf{k}}}{\ \mathbf{\partial U}}}\frac{\mathbf{\partial L}_{\mathbf{t}}}{\mathbf{\partial z}_{\mathbf{k}}}
在第t时刻,求对U的导数:∂U∂Lt=k=1∑t ∂U∂zk∂zk∂Lt
因此,如果想求出
∂
L
t
∂
U
,
我们需要先求出来
∂
z
k
∂
U
和
∂
L
t
∂
z
k
\text{因此,如果想求出}\frac{\partial L_t}{\partial \boldsymbol{U}},\text{我们需要先求出来}\frac{\partial \boldsymbol{z}_{\boldsymbol{k}}}{\partial \boldsymbol{U}}\text{和}\frac{\partial L_t}{\partial \boldsymbol{z}_{\boldsymbol{k}}}
因此,如果想求出∂U∂Lt,我们需要先求出来∂U∂zk和∂zk∂Lt
[
z
1
t
z
2
t
⋮
z
m
t
]
=
[
w
11
w
12
⋯
w
1
,
n
w
21
w
22
⋯
w
2
,
n
⋮
⋮
⋱
⋮
w
m
1
w
m
2
⋯
w
m
,
n
]
[
x
1
t
x
2
t
⋮
x
n
t
]
+
[
u
11
u
12
⋯
u
1
m
u
21
u
22
⋯
u
2
m
⋮
⋮
⋱
⋮
u
m
1
u
m
2
⋯
u
m
m
]
[
h
1
t
−
1
h
2
t
−
1
⋮
h
m
t
−
1
]
+
[
b
1
b
2
⋮
b
m
]
,
即
z
t
=
W
x
t
+
U
h
t
−
1
+
b
\left[ \begin{array}{c} z_{1}^{t}\\ z_{2}^{t}\\ \vdots\\ z_{m}^{t}\\ \end{array} \right] =\left[ \begin{matrix} w_{11}& w_{12}& \cdots& w_{1,n}\\ w_{21}& w_{22}& \cdots& w_{2,n}\\ \vdots& \vdots& \ddots& \vdots\\ w_{m1}& w_{m2}& \cdots& w_{m,n}\\ \end{matrix} \right] \left[ \begin{array}{c} x_{1}^{t}\\ x_{2}^{t}\\ \vdots\\ x_{n}^{t}\\ \end{array} \right] +\left[ \begin{matrix} u_{11}& u_{12}& \cdots& u_{1m}\\ u_{21}& u_{22}& \cdots& u_{2m}\\ \vdots& \vdots& \ddots& \vdots\\ u_{m1}& u_{m2}& \cdots& u_{mm}\\ \end{matrix} \right] \left[ \begin{array}{c} h_{1}^{t-1}\\ h_{2}^{t-1}\\ \vdots\\ h_{m}^{t-1}\\ \end{array} \right] +\left[ \begin{array}{c} b_1\\ b_2\\ \vdots\\ b_m\\ \end{array} \right] ,\text{即}\boldsymbol{z}_{\boldsymbol{t}}=\boldsymbol{Wx}_{\boldsymbol{t}}+\boldsymbol{Uh}_{\boldsymbol{t}-1}+\boldsymbol{b}
z1tz2t⋮zmt
=
w11w21⋮wm1w12w22⋮wm2⋯⋯⋱⋯w1,nw2,n⋮wm,n
x1tx2t⋮xnt
+
u11u21⋮um1u12u22⋮um2⋯⋯⋱⋯u1mu2m⋮umm
h1t−1h2t−1⋮hmt−1
+
b1b2⋮bm
,即zt=Wxt+Uht−1+b
[
h
1
t
h
2
t
⋮
h
m
t
]
=
f
(
[
z
1
t
z
2
t
⋮
z
m
t
]
)
,
即
h
t
=
f
(
z
t
)
\left[ \begin{array}{c} h_{1}^{t}\\ h_{2}^{t}\\ \vdots\\ h_{m}^{t}\\ \end{array} \right] =f\left( \left[ \begin{array}{c} z_{1}^{t}\\ z_{2}^{t}\\ \vdots\\ z_{m}^{t}\\ \end{array} \right] \right) ,\text{即}\boldsymbol{h}_{\boldsymbol{t}}=f\left( \boldsymbol{z}_{\boldsymbol{t}} \right)
h1th2t⋮hmt
=f
z1tz2t⋮zmt
,即ht=f(zt)
(
1
)
求
∂
z
k
∂
U
,
根据求导公式
∂
z
k
∂
U
=
∂
(
W
x
k
+
U
h
k
−
1
+
b
)
∂
U
=
h
k
−
1
T
\left( 1 \right) \mathbf{求}\frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial U}},\ \mathbf{根据求导公式\ \ \ \ \ \ \ \ \ \ } \frac{\partial \boldsymbol{z}_{\boldsymbol{k}}}{\partial \boldsymbol{U}}=\frac{\partial \left( \boldsymbol{Wx}_{\boldsymbol{k}}+\boldsymbol{Uh}_{\boldsymbol{k}-1}+\boldsymbol{b} \right)}{\partial \boldsymbol{U}}=\boldsymbol{h}_{\boldsymbol{k}-1}^{\boldsymbol{T}}
(1)求∂U∂zk, 根据求导公式 ∂U∂zk=∂U∂(Wxk+Uhk−1+b)=hk−1T
(
2
)求
∂
L
t
∂
z
k
,
设第
t
时刻的损失对第
k
时刻隐层神经元的净输入
z
k
的导数为
δ
t
,
k
=
∂
L
t
∂
z
k
\mathbf{(2)求}\frac{\boldsymbol{\partial }L_t}{\boldsymbol{\partial z}_{\boldsymbol{k}}},\text{设第}t\text{时刻的损失对第}k\text{时刻隐层神经元的净输入}\boldsymbol{z}_{\boldsymbol{k}}\text{的导数为}\boldsymbol{\delta }_{\boldsymbol{t,k}}=\frac{\partial L_t}{\partial \boldsymbol{z}_{\boldsymbol{k}}}
(2)求∂zk∂Lt,设第t时刻的损失对第k时刻隐层神经元的净输入zk的导数为δt,k=∂zk∂Lt
δ
t
,
k
=
∂
z
k
+
1
∂
z
k
∂
z
k
+
2
∂
z
k
+
1
⋯
∂
z
t
∂
z
t
−
1
∂
L
t
∂
z
t
\boldsymbol{\delta }_{\boldsymbol{t,k}}=\frac{\partial \boldsymbol{z}_{\boldsymbol{k}+1}}{\partial \boldsymbol{z}_{\boldsymbol{k}}}\frac{\partial \boldsymbol{z}_{\boldsymbol{k}+2}}{\partial \boldsymbol{z}_{\boldsymbol{k}+1}}\cdots \frac{\partial \boldsymbol{z}_{\boldsymbol{t}}}{\partial \boldsymbol{z}_{\boldsymbol{t}-1}}\frac{\partial L_t}{\partial \boldsymbol{z}_{\boldsymbol{t}}}
δt,k=∂zk∂zk+1∂zk+1∂zk+2⋯∂zt−1∂zt∂zt∂Lt
=
∂
z
k
+
1
∂
z
k
δ
t
,
k
+
1
=\frac{\partial \boldsymbol{z}_{\boldsymbol{k}+1}}{\partial \boldsymbol{z}_{\boldsymbol{k}}}\delta _{t,k+1}\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \
=∂zk∂zk+1δt,k+1
=
∂
h
k
∂
z
k
∂
z
k
+
1
∂
h
k
δ
t
,
k
+
1
=\frac{\partial \boldsymbol{h}_{\boldsymbol{k}}}{\partial \boldsymbol{z}_{\boldsymbol{k}}}\frac{\partial \boldsymbol{z}_{\boldsymbol{k}+1}}{\partial \boldsymbol{h}_{\boldsymbol{k}}}\boldsymbol{\delta }_{\boldsymbol{t,k}+1}\ \ \ \ \ \ \ \ \ \ \
=∂zk∂hk∂hk∂zk+1δt,k+1
接下来分别求
∂
h
k
∂
z
k
和
∂
z
k
+
1
∂
h
k
\text{接下来分别求}\frac{\partial \boldsymbol{h}_{\boldsymbol{k}}}{\partial \boldsymbol{z}_{\boldsymbol{k}}}\text{和}\frac{\partial \boldsymbol{z}_{\boldsymbol{k}+1}}{\partial \boldsymbol{h}_{\boldsymbol{k}}}
接下来分别求∂zk∂hk和∂hk∂zk+1
∂
h
k
∂
z
k
=
∂
f
(
z
k
)
∂
z
k
=
[
f
’
(
z
1
k
)
0
0
0
0
f
’
(
z
2
k
)
0
0
⋮
0
⋱
0
0
0
0
f
’
(
z
m
k
)
]
=
diag
(
f
’
(
z
k
)
)
(
根据向量对向量的求导公式
)
\frac{\partial \boldsymbol{h}_{\boldsymbol{k}}}{\partial \boldsymbol{z}_{\boldsymbol{k}}}=\frac{\partial f\left( \boldsymbol{z}_{\boldsymbol{k}} \right)}{\partial \boldsymbol{z}_{\boldsymbol{k}}}=\left[ \begin{matrix} f^’\left( \boldsymbol{z}_{1}^{\boldsymbol{k}} \right)& 0& 0& 0\\ 0& f^’\left( \boldsymbol{z}_{2}^{\boldsymbol{k}} \right)& 0& 0\\ \vdots& 0& \ddots& 0\\ 0& 0& 0& f^’\left( \boldsymbol{z}_{\boldsymbol{m}}^{\boldsymbol{k}} \right)\\ \end{matrix} \right] =\text{diag}\left( f^’\left( \boldsymbol{z}_{\boldsymbol{k}} \right) \right) \left( \text{根据向量对向量的求导公式} \right)
∂zk∂hk=∂zk∂f(zk)=
f’(z1k)0⋮00f’(z2k)0000⋱0000f’(zmk)
=diag(f’(zk))(根据向量对向量的求导公式)
∂
z
k
+
1
∂
h
k
=
∂
(
W
x
k
+
1
+
U
h
k
+
b
)
∂
h
k
=
U
T
(
根据矩阵求导公式
)
\frac{\partial \boldsymbol{z}_{\boldsymbol{k}+1}}{\partial \boldsymbol{h}_{\boldsymbol{k}}}=\frac{\partial \left( \boldsymbol{Wx}_{\boldsymbol{k}+1}+\boldsymbol{Uh}_{\boldsymbol{k}}+\boldsymbol{b} \right)}{\partial \boldsymbol{h}_{\boldsymbol{k}}}=\boldsymbol{U}^T\left( \text{根据矩阵求导公式} \right)
∂hk∂zk+1=∂hk∂(Wxk+1+Uhk+b)=UT(根据矩阵求导公式)
因此,
δ
t
,
k
=
diag
(
f
’
(
z
k
)
)
U
T
δ
t
,
k
+
1
\text{因此,}\boldsymbol{\delta }_{\boldsymbol{t,k}}=\text{diag}\left( f^’\left( \boldsymbol{z}_{\boldsymbol{k}} \right) \right) \boldsymbol{U}^T\boldsymbol{\delta }_{\boldsymbol{t,k}+1}
因此,δt,k=diag(f’(zk))UTδt,k+1
将
∂
L
t
∂
z
k
和
∂
z
k
∂
U
代入
∂
L
t
∂
U
可得,
第
t
时刻的损失对
U
的偏导
∂
L
t
∂
U
=
∑
k
=
1
t
δ
t
,
k
h
k
−
1
T
\text{将}\frac{\partial L_t}{\partial \boldsymbol{z}_{\boldsymbol{k}}}\text{和}\frac{\partial \boldsymbol{z}_{\boldsymbol{k}}}{\partial \boldsymbol{U}}\text{代入}\frac{\partial L_t}{\partial \boldsymbol{U}}\text{可得,}\mathbf{第t时刻的损失对U的偏导}\frac{\boldsymbol{\partial L}_{\boldsymbol{t}}}{\boldsymbol{\partial U}}=\sum_{\boldsymbol{k}=1}^{\boldsymbol{t}}{\boldsymbol{\delta }_{\boldsymbol{t,k}}\boldsymbol{h}_{\boldsymbol{k}-1}^{\boldsymbol{T}}}
将∂zk∂Lt和∂U∂zk代入∂U∂Lt可得,第t时刻的损失对U的偏导∂U∂Lt=k=1∑tδt,khk−1T
总的损失函数
L
等于各时刻损失函数之和,因此
∂
L
∂
U
=
∑
t
=
1
T
∂
L
t
∂
U
=
∑
t
=
1
T
∑
k
=
1
t
δ
t
,
k
h
k
−
1
T
\mathbf{总的损失函数L等于各时刻损失函数之和,因此}\frac{\partial L}{\partial \boldsymbol{U}}=\sum_{t=1}^T{\frac{\partial L_t}{\partial \boldsymbol{U}}=\sum_{t=1}^T{\sum_{k=1}^t{\boldsymbol{\delta }_{\boldsymbol{t,k}}\boldsymbol{h}_{\boldsymbol{k}-1}^{\boldsymbol{T}}}}}
总的损失函数L等于各时刻损失函数之和,因此∂U∂L=t=1∑T∂U∂Lt=t=1∑Tk=1∑tδt,khk−1T
二、习题6-2 推导公式 ∂ z k ∂ W \frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial W}} ∂W∂zk和公式 ∂ z k ∂ b \frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial b}} ∂b∂zk.
在 t 时刻的损失 L t 对 W 、 b 的梯度: ∂ L t ∂ W = ∑ k = 1 t ∂ z k ∂ W ∂ L t ∂ z k \text{在}t\text{时刻的损失}L_t\text{对}W\text{、}b\text{的梯度:}\frac{\boldsymbol{\partial }L_t}{\boldsymbol{\partial W}}=\sum_{\boldsymbol{k}=1}^{\boldsymbol{t}}{\frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial W}}\frac{\boldsymbol{\partial }L_t}{\boldsymbol{\partial z}_{\boldsymbol{k}}}} 在t时刻的损失Lt对W、b的梯度:∂W∂Lt=k=1∑t∂W∂zk∂zk∂Lt ∂ L t ∂ b = ∑ k = 1 t ∂ z k ∂ b ∂ L t ∂ z k \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \frac{\boldsymbol{\partial }L_t}{\boldsymbol{\partial b}}=\sum_{\boldsymbol{k}=1}^{\boldsymbol{t}}{\frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial b}}\frac{\boldsymbol{\partial }L_t}{\boldsymbol{\partial z}_{\boldsymbol{k}}}} ∂b∂Lt=k=1∑t∂b∂zk∂zk∂Lt ∂ z k ∂ W = ∂ ( W x k + U h k − 1 + b ) ∂ W = x k T \frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial W}}=\frac{\boldsymbol{\partial }\left( \boldsymbol{Wx}_{\boldsymbol{k}}+\boldsymbol{Uh}_{\boldsymbol{k}-1}+\boldsymbol{b} \right)}{\boldsymbol{\partial W}}=\boldsymbol{x}_{\boldsymbol{k}}^{\boldsymbol{T}} ∂W∂zk=∂W∂(Wxk+Uhk−1+b)=xkT ∂ z k ∂ b = ∂ ( W x k + U h k − 1 + b ) ∂ b = I \frac{\boldsymbol{\partial z}_{\boldsymbol{k}}}{\boldsymbol{\partial b}}=\frac{\boldsymbol{\partial }\left( \boldsymbol{Wx}_{\boldsymbol{k}}+\boldsymbol{Uh}_{\boldsymbol{k}-1}+\boldsymbol{b} \right)}{\boldsymbol{\partial b}}=\boldsymbol{I} ∂b∂zk=∂b∂(Wxk+Uhk−1+b)=I 将这两个式子代入上式可得: ∂ L t ∂ W = ∑ k = 1 t δ t , k x k T \text{将这两个式子代入上式可得:}\frac{\boldsymbol{\partial }L_t}{\boldsymbol{\partial W}}=\sum_{\boldsymbol{k}=1}^{\boldsymbol{t}}{\boldsymbol{\delta }_{\boldsymbol{t,k}}\boldsymbol{x}_{\boldsymbol{k}}^{\boldsymbol{T}}} 将这两个式子代入上式可得:∂W∂Lt=k=1∑tδt,kxkT ∂ L t ∂ b = ∑ k = 1 t δ t , k \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \frac{\boldsymbol{\partial L}_{\boldsymbol{t}}}{\boldsymbol{\partial b}}=\sum_{\boldsymbol{k}=1}^{\boldsymbol{t}}{\boldsymbol{\delta }_{\boldsymbol{t,k}}} ∂b∂Lt=k=1∑tδt,k 总损失 L 等于各个时刻的损失之和,因此, ∂ L ∂ W = ∑ t = 1 T ∑ k = 1 t δ t , k x k T \text{总损失}L\text{等于各个时刻的损失之和,因此,}\frac{\partial L}{\partial \boldsymbol{W}}=\sum_{t=1}^T{\sum_{k=1}^t{\boldsymbol{\delta }_{\boldsymbol{t,k}}\boldsymbol{x}_{\boldsymbol{k}}^{\boldsymbol{T}}}} 总损失L等于各个时刻的损失之和,因此,∂W∂L=t=1∑Tk=1∑tδt,kxkT ∂ L ∂ b = ∑ t = 1 T ∑ k = 1 t δ t , k \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \frac{\partial L}{\partial \boldsymbol{b}}=\sum_{t=1}^T{\sum_{k=1}^t{\delta _{t,k}}} ∂b∂L=t=1∑Tk=1∑tδt,k
三、长程依赖问题
长程依赖问题: 在BPTT中,由于梯度爆炸或梯度消失的问题,如果时刻t的输出
y
t
y_t
yt依赖于k时刻的输出
x
t
x_t
xt,当间隔t-k比较大时,简单神经网络很难模拟这种长距离的依赖关系。
从公式上来看
δ
t
,
k
=
∂
L
t
∂
z
k
=
∂
z
k
+
1
∂
z
k
∂
z
k
+
2
∂
z
k
+
1
⋯
∂
z
t
∂
z
t
−
1
∂
L
t
∂
z
t
\delta _{t,k}=\frac{\partial L_t}{\partial z_k}=\frac{\partial z_{k+1}}{\partial z_k}\frac{\partial z_{k+2}}{\partial z_{k+1}}\cdots \frac{\partial z_t}{\partial z_{t-1}}\frac{\partial L_t}{\partial z_t}
δt,k=∂zk∂Lt=∂zk∂zk+1∂zk+1∂zk+2⋯∂zt−1∂zt∂zt∂Lt
=
∏
τ
=
k
t
−
1
(
diag
(
f
’
(
z
τ
)
)
U
T
)
∂
L
t
∂
z
t
=\prod_{\tau =k}^{t-1}{\left( \text{diag}\left( f^’\left( z_{\tau} \right) \right) U^T \right) \frac{\partial L_t}{\partial z_t}}\ \ \
=τ=k∏t−1(diag(f’(zτ))UT)∂zt∂Lt
如果
diag
(
f
’
(
z
τ
)
)
U
T
>
1
\text{diag}\left( f^’\left( z_{\tau} \right) \right) U^T>1
diag(f’(zτ))UT>1,当时间间隔
t
−
k
t-k
t−k较大时,梯度会越来越大,从而出现梯度爆炸。
如果
diag
(
f
’
(
z
τ
)
)
U
T
<
1
\text{diag}\left( f^’\left( z_{\tau} \right) \right) U^T<1
diag(f’(zτ))UT<1,当时间间隔
t
−
k
t-k
t−k较大时,梯度会越来越小,从而出现梯度消失。


RNN中权重矩阵最终的梯度是各个时刻的梯度之和 , 假设某轮训练中,各时刻的梯度以及最终的梯度之和如下图:

从t-3时刻开始,梯度已经几乎减少到0了。即从此时刻开始再往之前走,得到的梯度(几乎为零)就不会对最终的梯度值有任何贡献。这就是原始RNN无法处理长距离依赖的原因。
四、长程依赖问题的解决方案
针对梯度爆炸: 一般通过权重衰减或梯度截断来避免。
权重衰减是通过给参数增加
l
1
l_1
l1或
l
2
l_2
l2范数的正则化来限制参数的取值范围,从而使得
diag
(
f
’
(
z
τ
)
)
U
T
<
=
1
\text{diag}\left( f^’\left( z_{\tau} \right) \right) U^T<=1
diag(f’(zτ))UT<=1。
梯度截断是设定一个阈值,当梯度的模大于一定阈值时,就将它截断为一个较小的数。

针对梯度消失: 我们对模型加以改进,使
h
t
=
h
t
−
1
+
g
(
x
t
,
h
t
−
1
;
θ
)
h_t=h_{t-1}+g\left( x_t,h_{t-1};\theta \right)
ht=ht−1+g(xt,ht−1;θ) (类似ResNet)
这样 𝒉𝑡 和 𝒉𝑡−1 之间为既有线性关系,也有非线性关系,并且可以缓解梯度消失问题.
五、习题6-3 当使用公式 h t = h t − 1 + g ( x t , h t − 1 , θ ) h_t=h_{t-1}+g\left( x_t,h_{t-1},\theta \right) ht=ht−1+g(xt,ht−1,θ) 作为循环神经网络的状态更新公式时, 分析其可能存在梯度爆炸的原因并给出解决方法.

h
t
=
h
t
−
1
+
g
(
x
t
,
h
t
−
1
;
θ
)
h_t=h_{t-1}+g\left( x_t,h_{t-1};\theta \right)
ht=ht−1+g(xt,ht−1;θ)
∂
h
t
∂
h
t
−
1
=
∂
(
h
t
−
1
+
g
(
W
x
k
+
U
h
k
−
1
+
b
)
)
∂
h
k
−
1
=
1
+
diag
(
g
’
(
z
k
)
)
U
T
\frac{\partial h_t}{\partial h_{t-1}}=\frac{\partial \left( h_{t-1}+g\left( Wx_k+Uh_{k-1}+b \right) \right)}{\partial h_{k-1}}=1+\text{diag}\left( g^’\left( z_k \right) \right) U^T
∂ht−1∂ht=∂hk−1∂(ht−1+g(Wxk+Uhk−1+b))=1+diag(g’(zk))UT
当
diag
(
g
’
(
z
k
)
)
U
T
>
0
\text{diag}\left( g^’\left( z_k \right) \right) U^T>0
diag(g’(zk))UT>0时,
∂
h
t
∂
h
t
−
1
\frac{\partial h_t}{\partial h_{t-1}}
∂ht−1∂ht肯定是大于1的,而且每次求梯度时会有多个
∂
h
t
∂
h
t
−
1
\frac{\partial h_t}{\partial h_{t-1}}
∂ht−1∂ht连乘,从而使梯度越来越来大,发生梯度爆炸。
如何解决: 可以通过引入门控机制来进一步改进模型,主要有:长短期记忆网络(LSTM)和门控循环单元网络(GRU)。
LSTM的内容没看太明白,下个作业会详细写这部分。
可以结合下面动图来稍微理解一下。




六、习题6-2P 设计简单RNN模型,分别用Numpy、Pytorch实现反向传播算子,并代入数值测试.
1.RNNCell
前向传播
import numpy as np
import torch.nn.functional as F
import torch
# GRADED FUNCTION: rnn_cell_forward
def rnn_cell_forward(xt, a_prev, parameters):
"""
Implements a single forward step of the RNN-cell as described in Figure (2)
Arguments:
xt -- your input data at timestep "t", numpy array of shape (n_x, m).
a_prev -- Hidden state at timestep "t-1", numpy array of shape (n_a, m)
parameters -- python dictionary containing:
Wax -- Weight matrix multiplying the input, numpy array of shape (n_a, n_x)
Waa -- Weight matrix multiplying the hidden state, numpy array of shape (n_a, n_a)
Wya -- Weight matrix relating the hidden-state to the output, numpy array of shape (n_y, n_a)
ba -- Bias, numpy array of shape (n_a, 1)
by -- Bias relating the hidden-state to the output, numpy array of shape (n_y, 1)
Returns:
a_next -- next hidden state, of shape (n_a, m)
yt_pred -- prediction at timestep "t", numpy array of shape (n_y, m)
cache -- tuple of values needed for the backward pass, contains (a_next, a_prev, xt, parameters)
"""
# Retrieve parameters from "parameters"
Wax = parameters["Wax"]
Waa = parameters["Waa"]
Wya = parameters["Wya"]
ba = parameters["ba"]
by = parameters["by"]
### START CODE HERE ### (≈2 lines)
# compute next activation state using the formula given above
a_next = np.tanh(np.dot(Wax, xt) + np.dot(Waa, a_prev) + ba)
# compute output of the current cell using the formula given above
yt_pred = F.softmax(torch.from_numpy(np.dot(Wya, a_next) + by),dim=0)
### END CODE HERE ###
# store values you need for backward propagation in cache
cache = (a_next, a_prev, xt, parameters)
return a_next, yt_pred, cache
np.random.seed(1)
xt = np.random.randn(3,10)
a_prev = np.random.randn(5,10)
Waa = np.random.randn(5,5)
Wax = np.random.randn(5,3)
Wya = np.random.randn(2,5)
ba = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Waa": Waa, "Wax": Wax, "Wya": Wya, "ba": ba, "by": by}
a_next, yt_pred, cache = rnn_cell_forward(xt, a_prev, parameters)
print("a_next[4] = ", a_next[4])
print("a_next.shape = ", a_next.shape)
print("yt_pred[1] =", yt_pred[1])
print("yt_pred.shape = ", yt_pred.shape)

反向传播
def rnn_cell_backward(da_next, cache):
"""
Implements the backward pass for the RNN-cell (single time-step).
Arguments:
da_next -- Gradient of loss with respect to next hidden state
cache -- python dictionary containing useful values (output of rnn_step_forward())
Returns:
gradients -- python dictionary containing:
dx -- Gradients of input data, of shape (n_x, m)
da_prev -- Gradients of previous hidden state, of shape (n_a, m)
dWax -- Gradients of input-to-hidden weights, of shape (n_a, n_x)
dWaa -- Gradients of hidden-to-hidden weights, of shape (n_a, n_a)
dba -- Gradients of bias vector, of shape (n_a, 1)
"""
# Retrieve values from cache
(a_next, a_prev, xt, parameters) = cache
# Retrieve values from parameters
Wax = parameters["Wax"]
Waa = parameters["Waa"]
Wya = parameters["Wya"]
ba = parameters["ba"]
by = parameters["by"]
### START CODE HERE ###
# compute the gradient of tanh with respect to a_next (≈1 line)
dtanh = (1 - a_next * a_next) * da_next # 注意这里是 element_wise ,即 * da_next,dtanh 可以只看做一个中间结果的表示方式
# compute the gradient of the loss with respect to Wax (≈2 lines)
dxt = np.dot(Wax.T, dtanh)
dWax = np.dot(dtanh, xt.T)
# 根据公式1、2, dxt = da_next .( Wax.T . (1- tanh(a_next)**2) ) = da_next .( Wax.T . dtanh * (1/d_a_next) )= Wax.T . dtanh
# 根据公式1、3, dWax = da_next .( (1- tanh(a_next)**2) . xt.T) = da_next .( dtanh * (1/d_a_next) . xt.T )= dtanh . xt.T
# 上面的 . 表示 np.dot
# compute the gradient with respect to Waa (≈2 lines)
da_prev = np.dot(Waa.T, dtanh)
dWaa = np.dot(dtanh, a_prev.T)
# compute the gradient with respect to b (≈1 line)
dba = np.sum(dtanh, keepdims=True, axis=-1) # axis=0 列方向上操作 axis=1 行方向上操作 keepdims=True 矩阵的二维特性
### END CODE HERE ###
# Store the gradients in a python dictionary
gradients = {"dxt": dxt, "da_prev": da_prev, "dWax": dWax, "dWaa": dWaa, "dba": dba}
return gradients
np.random.seed(1)
xt = np.random.randn(3,10)
a_prev = np.random.randn(5,10)
Wax = np.random.randn(5,3)
Waa = np.random.randn(5,5)
Wya = np.random.randn(2,5)
b = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Wax": Wax, "Waa": Waa, "Wya": Wya, "ba": ba, "by": by}
a_next, yt, cache = rnn_cell_forward(xt, a_prev, parameters)
da_next = np.random.randn(5,10)
gradients = rnn_cell_backward(da_next, cache)
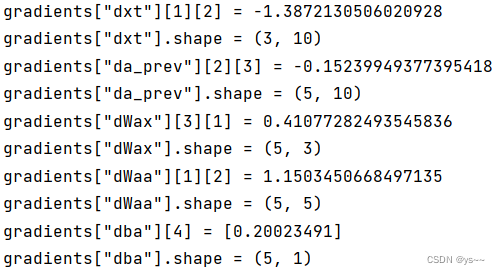
print("gradients[\"dxt\"][1][2] =", gradients["dxt"][1][2])
print("gradients[\"dxt\"].shape =", gradients["dxt"].shape)
print("gradients[\"da_prev\"][2][3] =", gradients["da_prev"][2][3])
print("gradients[\"da_prev\"].shape =", gradients["da_prev"].shape)
print("gradients[\"dWax\"][3][1] =", gradients["dWax"][3][1])
print("gradients[\"dWax\"].shape =", gradients["dWax"].shape)
print("gradients[\"dWaa\"][1][2] =", gradients["dWaa"][1][2])
print("gradients[\"dWaa\"].shape =", gradients["dWaa"].shape)
print("gradients[\"dba\"][4] =", gradients["dba"][4])
print("gradients[\"dba\"].shape =", gradients["dba"].shape)
gradients["dxt"][1][2] = -0.4605641030588796
gradients["dxt"].shape = (3, 10)
gradients["da_prev"][2][3] = 0.08429686538067724
gradients["da_prev"].shape = (5, 10)
gradients["dWax"][3][1] = 0.39308187392193034
gradients["dWax"].shape = (5, 3)
gradients["dWaa"][1][2] = -0.28483955786960663
gradients["dWaa"].shape = (5, 5)
gradients["dba"][4] = [0.80517166]
gradients["dba"].shape = (5, 1)
RNN
前向传播
def rnn_forward(x, a0, parameters):
"""
Implement the forward propagation of the recurrent neural network described in Figure (3).
Arguments:
x -- Input data for every time-step, of shape (n_x, m, T_x).
a0 -- Initial hidden state, of shape (n_a, m)
parameters -- python dictionary containing:
Waa -- Weight matrix multiplying the hidden state, numpy array of shape (n_a, n_a)
Wax -- Weight matrix multiplying the input, numpy array of shape (n_a, n_x)
Wya -- Weight matrix relating the hidden-state to the output, numpy array of shape (n_y, n_a)
ba -- Bias numpy array of shape (n_a, 1)
by -- Bias relating the hidden-state to the output, numpy array of shape (n_y, 1)
Returns:
a -- Hidden states for every time-step, numpy array of shape (n_a, m, T_x)
y_pred -- Predictions for every time-step, numpy array of shape (n_y, m, T_x)
caches -- tuple of values needed for the backward pass, contains (list of caches, x)
"""
# Initialize "caches" which will contain the list of all caches
caches = []
# Retrieve dimensions from shapes of x and Wy
n_x, m, T_x = x.shape
n_y, n_a = parameters["Wya"].shape
### START CODE HERE ###
# initialize "a" and "y" with zeros (≈2 lines)
a = np.zeros((n_a, m, T_x))
y_pred = np.zeros((n_y, m, T_x))
# Initialize a_next (≈1 line)
a_next = a0
# loop over all time-steps
for t in range(T_x):
# Update next hidden state, compute the prediction, get the cache (≈1 line)
a_next, yt_pred, cache = rnn_cell_forward(x[:, :, t], a_next, parameters)
# Save the value of the new "next" hidden state in a (≈1 line)
a[:, :, t] = a_next
# Save the value of the prediction in y (≈1 line)
y_pred[:, :, t] = yt_pred
# Append "cache" to "caches" (≈1 line)
caches.append(cache)
### END CODE HERE ###
# store values needed for backward propagation in cache
caches = (caches, x)
return a, y_pred, caches
np.random.seed(1)
x = np.random.randn(3,10,4)
a0 = np.random.randn(5,10)
Waa = np.random.randn(5,5)
Wax = np.random.randn(5,3)
Wya = np.random.randn(2,5)
ba = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Waa": Waa, "Wax": Wax, "Wya": Wya, "ba": ba, "by": by}
a, y_pred, caches = rnn_forward(x, a0, parameters)
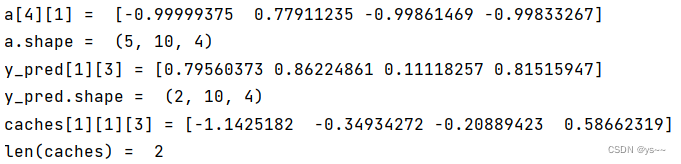
print("a[4][1] = ", a[4][1])
print("a.shape = ", a.shape)
print("y_pred[1][3] =", y_pred[1][3])
print("y_pred.shape = ", y_pred.shape)
print("caches[1][1][3] =", caches[1][1][3])
print("len(caches) = ", len(caches))
反向传播
def rnn_backward(da, caches):
"""
Implement the backward pass for a RNN over an entire sequence of input data.
Arguments:
da -- Upstream gradients of all hidden states, of shape (n_a, m, T_x)
caches -- tuple containing information from the forward pass (rnn_forward)
Returns:
gradients -- python dictionary containing:
dx -- Gradient w.r.t. the input data, numpy-array of shape (n_x, m, T_x)
da0 -- Gradient w.r.t the initial hidden state, numpy-array of shape (n_a, m)
dWax -- Gradient w.r.t the input's weight matrix, numpy-array of shape (n_a, n_x)
dWaa -- Gradient w.r.t the hidden state's weight matrix, numpy-arrayof shape (n_a, n_a)
dba -- Gradient w.r.t the bias, of shape (n_a, 1)
"""
### START CODE HERE ###
# Retrieve values from the first cache (t=1) of caches (≈2 lines)
(caches, x) = caches
(a1, a0, x1, parameters) = caches[0] # t=1 时的值
# Retrieve dimensions from da's and x1's shapes (≈2 lines)
n_a, m, T_x = da.shape
n_x, m = x1.shape
# initialize the gradients with the right sizes (≈6 lines)
dx = np.zeros((n_x, m, T_x))
dWax = np.zeros((n_a, n_x))
dWaa = np.zeros((n_a, n_a))
dba = np.zeros((n_a, 1))
da0 = np.zeros((n_a, m))
da_prevt = np.zeros((n_a, m))
# Loop through all the time steps
for t in reversed(range(T_x)):
# Compute gradients at time step t. Choose wisely the "da_next" and the "cache" to use in the backward propagation step. (≈1 line)
gradients = rnn_cell_backward(da[:, :, t] + da_prevt, caches[t]) # da[:,:,t] + da_prevt ,每一个时间步后更新梯度
# Retrieve derivatives from gradients (≈ 1 line)
dxt, da_prevt, dWaxt, dWaat, dbat = gradients["dxt"], gradients["da_prev"], gradients["dWax"], gradients[
"dWaa"], gradients["dba"]
# Increment global derivatives w.r.t parameters by adding their derivative at time-step t (≈4 lines)
dx[:, :, t] = dxt
dWax += dWaxt
dWaa += dWaat
dba += dbat
# Set da0 to the gradient of a which has been backpropagated through all time-steps (≈1 line)
da0 = da_prevt
### END CODE HERE ###
# Store the gradients in a python dictionary
gradients = {"dx": dx, "da0": da0, "dWax": dWax, "dWaa": dWaa, "dba": dba}
return gradients
np.random.seed(1)
x = np.random.randn(3,10,4)
a0 = np.random.randn(5,10)
Wax = np.random.randn(5,3)
Waa = np.random.randn(5,5)
Wya = np.random.randn(2,5)
ba = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Wax": Wax, "Waa": Waa, "Wya": Wya, "ba": ba, "by": by}
a, y, caches = rnn_forward(x, a0, parameters)
da = np.random.randn(5, 10, 4)
gradients = rnn_backward(da, caches)
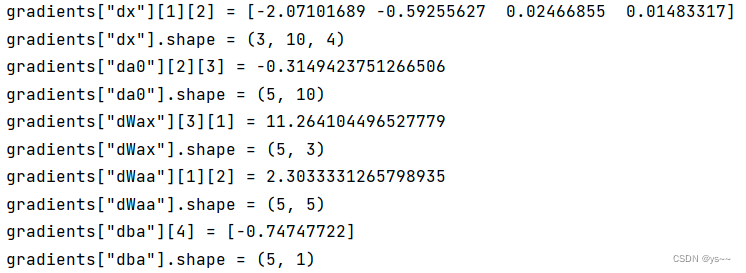
print("gradients[\"dx\"][1][2] =", gradients["dx"][1][2])
print("gradients[\"dx\"].shape =", gradients["dx"].shape)
print("gradients[\"da0\"][2][3] =", gradients["da0"][2][3])
print("gradients[\"da0\"].shape =", gradients["da0"].shape)
print("gradients[\"dWax\"][3][1] =", gradients["dWax"][3][1])
print("gradients[\"dWax\"].shape =", gradients["dWax"].shape)
print("gradients[\"dWaa\"][1][2] =", gradients["dWaa"][1][2])
print("gradients[\"dWaa\"].shape =", gradients["dWaa"].shape)
print("gradients[\"dba\"][4] =", gradients["dba"][4])
print("gradients[\"dba\"].shape =", gradients["dba"].shape)
分别用numpy和torch实现前向和反向传播
import torch
import numpy as np
class RNNCell:
def __init__(self, weight_ih, weight_hh,
bias_ih, bias_hh):
self.weight_ih = weight_ih
self.weight_hh = weight_hh
self.bias_ih = bias_ih
self.bias_hh = bias_hh
self.x_stack = []
self.dx_list = []
self.dw_ih_stack = []
self.dw_hh_stack = []
self.db_ih_stack = []
self.db_hh_stack = []
self.prev_hidden_stack = []
self.next_hidden_stack = []
# temporary cache
self.prev_dh = None
def __call__(self, x, prev_hidden):
self.x_stack.append(x)
next_h = np.tanh(
np.dot(x, self.weight_ih.T)
+ np.dot(prev_hidden, self.weight_hh.T)
+ self.bias_ih + self.bias_hh)
self.prev_hidden_stack.append(prev_hidden)
self.next_hidden_stack.append(next_h)
# clean cache
self.prev_dh = np.zeros(next_h.shape)
return next_h
def backward(self, dh):
x = self.x_stack.pop()
prev_hidden = self.prev_hidden_stack.pop()
next_hidden = self.next_hidden_stack.pop()
d_tanh = (dh + self.prev_dh) * (1 - next_hidden ** 2)
self.prev_dh = np.dot(d_tanh, self.weight_hh)
dx = np.dot(d_tanh, self.weight_ih)
self.dx_list.insert(0, dx)
dw_ih = np.dot(d_tanh.T, x)
self.dw_ih_stack.append(dw_ih)
dw_hh = np.dot(d_tanh.T, prev_hidden)
self.dw_hh_stack.append(dw_hh)
self.db_ih_stack.append(d_tanh)
self.db_hh_stack.append(d_tanh)
return self.dx_list
if __name__ == '__main__':
np.random.seed(123)
torch.random.manual_seed(123)
np.set_printoptions(precision=6, suppress=True)
rnn_PyTorch = torch.nn.RNN(4, 5).double()
rnn_numpy = RNNCell(rnn_PyTorch.all_weights[0][0].data.numpy(),
rnn_PyTorch.all_weights[0][1].data.numpy(),
rnn_PyTorch.all_weights[0][2].data.numpy(),
rnn_PyTorch.all_weights[0][3].data.numpy())
nums = 3
x3_numpy = np.random.random((nums, 3, 4))
x3_tensor = torch.tensor(x3_numpy, requires_grad=True)
h3_numpy = np.random.random((1, 3, 5))
h3_tensor = torch.tensor(h3_numpy, requires_grad=True)
dh_numpy = np.random.random((nums, 3, 5))
dh_tensor = torch.tensor(dh_numpy, requires_grad=True)
h3_tensor = rnn_PyTorch(x3_tensor, h3_tensor)
h_numpy_list = []
h_numpy = h3_numpy[0]
for i in range(nums):
h_numpy = rnn_numpy(x3_numpy[i], h_numpy)
h_numpy_list.append(h_numpy)
h3_tensor[0].backward(dh_tensor)
for i in reversed(range(nums)):
rnn_numpy.backward(dh_numpy[i])
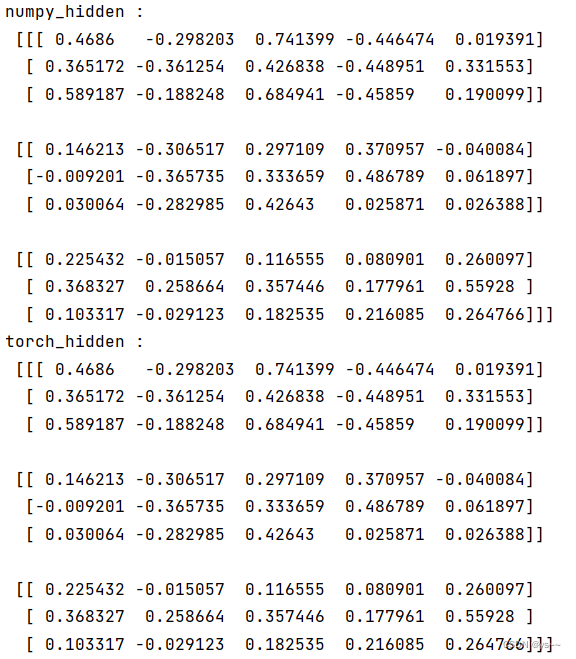
print("numpy_hidden :\n", np.array(h_numpy_list))
print("torch_hidden :\n", h3_tensor[0].data.numpy())
print("-----------------------------------------------")
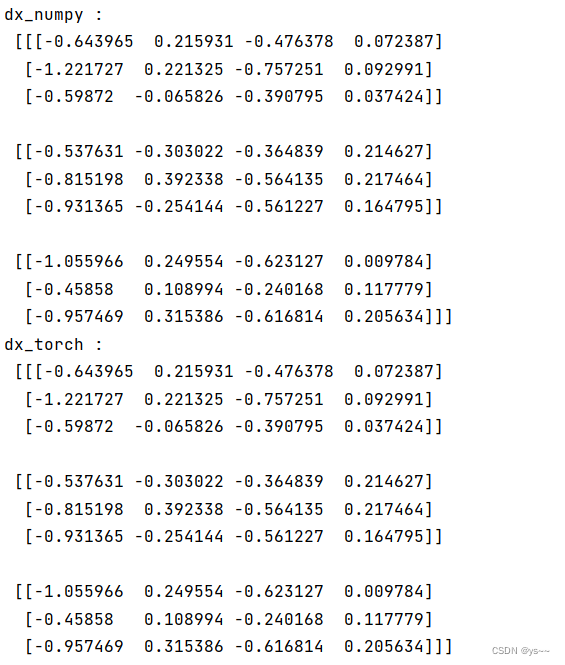
print("dx_numpy :\n", np.array(rnn_numpy.dx_list))
print("dx_torch :\n", x3_tensor.grad.data.numpy())
print("------------------------------------------------")
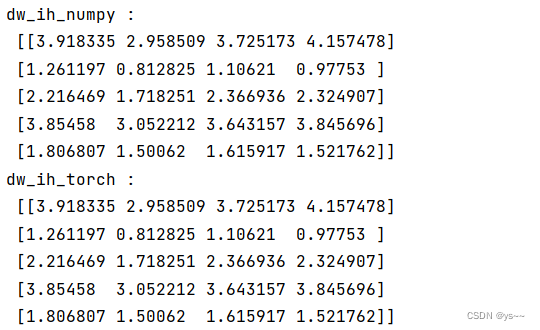
print("dw_ih_numpy :\n",
np.sum(rnn_numpy.dw_ih_stack, axis=0))
print("dw_ih_torch :\n",
rnn_PyTorch.all_weights[0][0].grad.data.numpy())
print("------------------------------------------------")
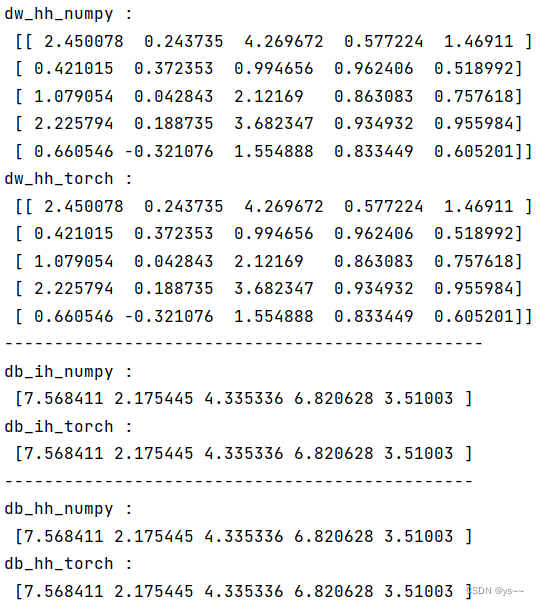
print("dw_hh_numpy :\n",
np.sum(rnn_numpy.dw_hh_stack, axis=0))
print("dw_hh_torch :\n",
rnn_PyTorch.all_weights[0][1].grad.data.numpy())
print("------------------------------------------------")
print("db_ih_numpy :\n",
np.sum(rnn_numpy.db_ih_stack, axis=(0, 1)))
print("db_ih_torch :\n",
rnn_PyTorch.all_weights[0][2].grad.data.numpy())
print("-----------------------------------------------")
print("db_hh_numpy :\n",
np.sum(rnn_numpy.db_hh_stack, axis=(0, 1)))
print("db_hh_torch :\n",
rnn_PyTorch.all_weights[0][3].grad.data.numpy())
感觉这次作业数学知识比较多,最好提前看看链式法则、矩阵求导方面的知识!
参考:
循环神经网络讲解|随时间反向传播推导(BPTT)|RNN梯度爆炸和梯度消失的原因-b站
循环神经网络——RNN的训练算法:BPTT-csdn
学习笔记-循环神经网络(RNN)及沿时反向传播BPTT-知乎
线性代数~向量对向量的求导-知乎
深度学习之循环神经网络RNN2-csdn
如何从RNN起步,一步一步通俗理解LSTM-csdn
L5W1作业1 手把手实现循环神经网络-csdn
NNDL 作业9:分别使用numpy和pytorch实现BPTT-csdn















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









