






多头注意力机制
class MultiHeadedAttention(nn.Module):
def __init__(self, h, d_model, dropout=0.1):
"Take in model size and number of heads."
super(MultiHeadedAttention, self).__init__()
assert d_model % h == 0
# We assume d_v always equals d_k
self.d_k = d_model // h
self.h = h
self.linears = clones(nn.Linear(d_model, d_model), 4)
self.attn = None
self.dropout = nn.Dropout(p=dropout)
def forward(self, query, key, value, mask=None):
"Implements Figure 2"
if mask is not None:
# Same mask applied to all h heads.
mask = mask.unsqueeze(1)
nbatches = query.size(0)
# 1) Do all the linear projections in batch from d_model => h x d_k
query, key, value = [
lin(x).view(nbatches, -1, self.h, self.d_k).transpose(1, 2)
for lin, x in zip(self.linears, (query, key, value))
]
# 2) Apply attention on all the projected vectors in batch.
x, self.attn = attention(
query, key, value, mask=mask, dropout=self.dropout
)
# 3) "Concat" using a view and apply a final linear.
x = (
x.transpose(1, 2)
.contiguous()
.view(nbatches, -1, self.h * self.d_k)
)
del query
del key
del value
return self.linears[-1](x)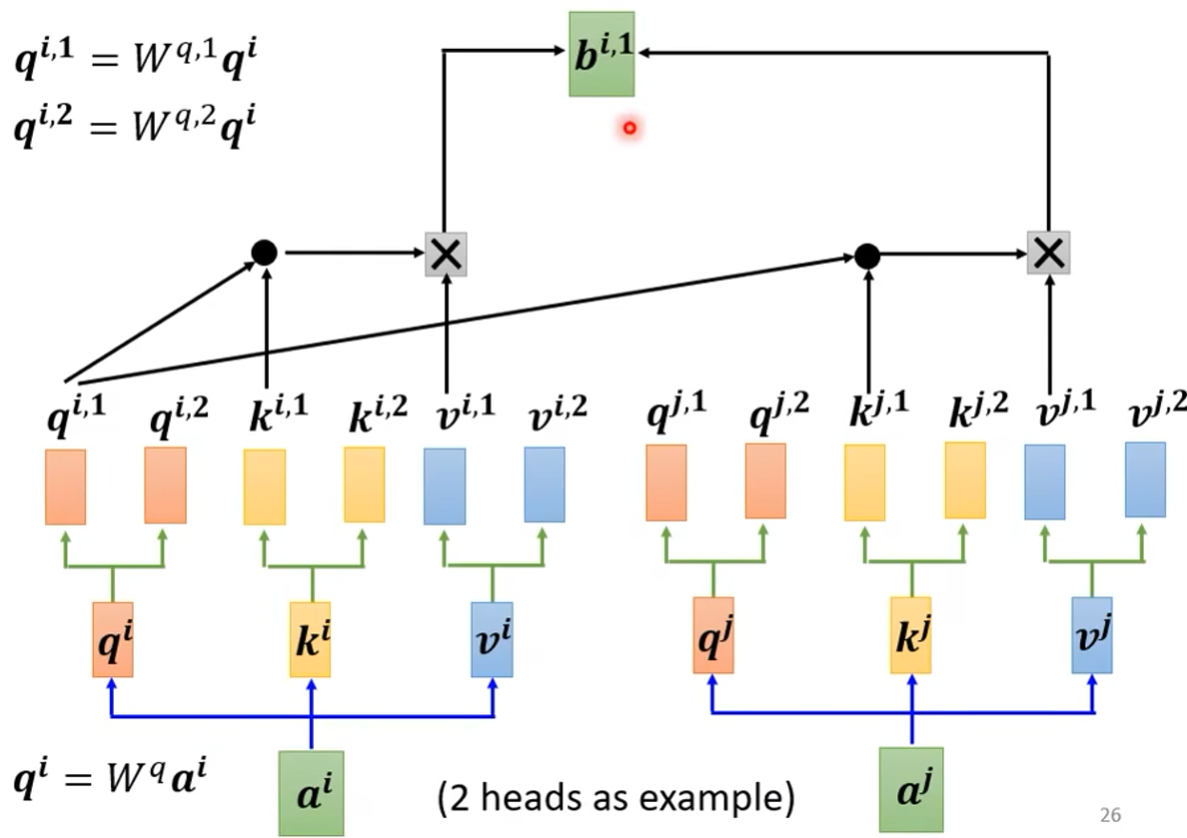
如上图举例所示,qi1在算attention分数时忽略qi2,只计算qi1的attention,qi2也是同样的操作,这即是两头时的操作,多头操作亦如此。
多头池化注意力(Multi Head Pooling Attention)
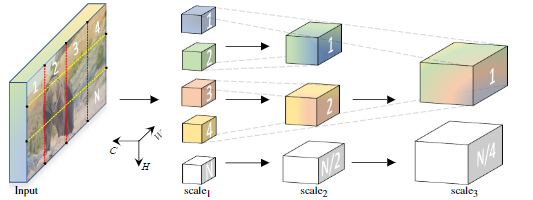
首先对MHPA作出解释,这是本文的核心,它使得多尺度变换器以逐渐变化的时空分辨率进行操作。与原始的多头注意力(MHA)不同,在原始的多头注意力中,通道维度和时空分辨率保持不变,MHPA将潜在张量序列合并,以减少参与输入的序列长度(分辨率)。如图所示

池化注意力:
def attention_pool(tensor, pool, thw_shape, has_cls_embed=True, norm=None):
if pool is None:
return tensor, thw_shape
tensor_dim = tensor.ndim
if tensor_dim == 4:
pass
elif tensor_dim == 3:
tensor = tensor.unsqueeze(1)
else:
raise NotImplementedError(f"Unsupported input dimension {tensor.shape}")
if has_cls_embed:
cls_tok, tensor = tensor[:, :, :1, :], tensor[:, :, 1:, :]
B, N, L, C = tensor.shape
T, H, W = thw_shape
tensor = (
tensor.reshape(B * N, T, H, W, C).permute(0, 4, 1, 2, 3).contiguous()
)
tensor = pool(tensor)
thw_shape = [tensor.shape[2], tensor.shape[3], tensor.shape[4]]
L_pooled = tensor.shape[2] * tensor.shape[3] * tensor.shape[4]
tensor = tensor.reshape(B, N, C, L_pooled).transpose(2, 3)
if has_cls_embed:
tensor = torch.cat((cls_tok, tensor), dim=2)
if norm is not None:
tensor = norm(tensor)
# Assert tensor_dim in [3, 4]
if tensor_dim == 4:
pass
else: # tensor_dim == 3:
tensor = tensor.squeeze(1)
return tensor, thw_shape多层感知机
class Mlp(nn.Module):
def __init__(
self,
in_features,
hidden_features=None,
out_features=None,
act_layer=nn.GELU,
drop_rate=0.0,
):
super().__init__()
self.drop_rate = drop_rate
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
if self.drop_rate > 0.0:
self.drop = nn.Dropout(drop_rate)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
if self.drop_rate > 0.0:
x = self.drop(x)
x = self.fc2(x)
if self.drop_rate > 0.0:
x = self.drop(x)
return x分类头
class ClassificationHead(nn.Sequential):
def __init__(self, emb_size: int = 768, n_classes: int = 1000):
super().__init__(
Reduce('b n e -> b e', reduction='mean'),
nn.LayerNorm(emb_size),
nn.Linear(emb_size, n_classes))
多尺度变换器模型
逐步增加信道维度,同时降低整个网络的时空分辨率(即序列长度)。MViT在早期层中具有精细的时空分辨率和低信道维度,而在后期层中,变为粗略的时空分辨率和高信道维度。如图所示:
class MultiScaleAttention(nn.Module):
def __init__(
self,
dim,
dim_out,
input_size,
num_heads=8,
qkv_bias=False,
drop_rate=0.0,
kernel_q=(1, 1, 1),
kernel_kv=(1, 1, 1),
stride_q=(1, 1, 1),
stride_kv=(1, 1, 1),
norm_layer=nn.LayerNorm,
has_cls_embed=True,
# Options include `conv`, `avg`, and `max`.
mode="conv",
# If True, perform pool before projection.
pool_first=False,
rel_pos_spatial=False,
rel_pos_temporal=False,
rel_pos_zero_init=False,
residual_pooling=False,
separate_qkv=False,
):
super().__init__()
self.pool_first = pool_first
self.separate_qkv = separate_qkv
self.drop_rate = drop_rate
self.num_heads = num_heads
self.dim_out = dim_out
head_dim = dim_out // num_heads
self.scale = head_dim**-0.5
self.has_cls_embed = has_cls_embed
self.mode = mode
padding_q = [int(q // 2) for q in kernel_q]
padding_kv = [int(kv // 2) for kv in kernel_kv]
if pool_first or separate_qkv:
self.q = nn.Linear(dim, dim_out, bias=qkv_bias)
self.k = nn.Linear(dim, dim_out, bias=qkv_bias)
self.v = nn.Linear(dim, dim_out, bias=qkv_bias)
else:
self.qkv = nn.Linear(dim, dim_out * 3, bias=qkv_bias)
self.proj = nn.Linear(dim_out, dim_out)
if drop_rate > 0.0:
self.proj_drop = nn.Dropout(drop_rate)
# Skip pooling with kernel and stride size of (1, 1, 1).
if numpy.prod(kernel_q) == 1 and numpy.prod(stride_q) == 1:
kernel_q = ()
if numpy.prod(kernel_kv) == 1 and numpy.prod(stride_kv) == 1:
kernel_kv = ()
if mode in ("avg", "max"):
pool_op = nn.MaxPool3d if mode == "max" else nn.AvgPool3d
self.pool_q = (
pool_op(kernel_q, stride_q, padding_q, ceil_mode=False)
if len(kernel_q) > 0
else None
)
self.pool_k = (
pool_op(kernel_kv, stride_kv, padding_kv, ceil_mode=False)
if len(kernel_kv) > 0
else None
)
self.pool_v = (
pool_op(kernel_kv, stride_kv, padding_kv, ceil_mode=False)
if len(kernel_kv) > 0
else None
)
elif mode == "conv" or mode == "conv_unshared":
if pool_first:
dim_conv = dim // num_heads if mode == "conv" else dim
else:
dim_conv = dim_out // num_heads if mode == "conv" else dim_out
self.pool_q = (
nn.Conv3d(
dim_conv,
dim_conv,
kernel_q,
stride=stride_q,
padding=padding_q,
groups=dim_conv,
bias=False,
)
if len(kernel_q) > 0
else None
)
self.norm_q = norm_layer(dim_conv) if len(kernel_q) > 0 else None
self.pool_k = (
nn.Conv3d(
dim_conv,
dim_conv,
kernel_kv,
stride=stride_kv,
padding=padding_kv,
groups=dim_conv,
bias=False,
)
if len(kernel_kv) > 0
else None
)
self.norm_k = norm_layer(dim_conv) if len(kernel_kv) > 0 else None
self.pool_v = (
nn.Conv3d(
dim_conv,
dim_conv,
kernel_kv,
stride=stride_kv,
padding=padding_kv,
groups=dim_conv,
bias=False,
)
if len(kernel_kv) > 0
else None
)
self.norm_v = norm_layer(dim_conv) if len(kernel_kv) > 0 else None
else:
raise NotImplementedError(f"Unsupported model {mode}")
self.rel_pos_spatial = rel_pos_spatial
self.rel_pos_temporal = rel_pos_temporal
if self.rel_pos_spatial:
assert input_size[1] == input_size[2]
size = input_size[1]
q_size = size // stride_q[1] if len(stride_q) > 0 else size
kv_size = size // stride_kv[1] if len(stride_kv) > 0 else size
rel_sp_dim = 2 * max(q_size, kv_size) - 1
self.rel_pos_h = nn.Parameter(torch.zeros(rel_sp_dim, head_dim))
self.rel_pos_w = nn.Parameter(torch.zeros(rel_sp_dim, head_dim))
if not rel_pos_zero_init:
trunc_normal_(self.rel_pos_h, std=0.02)
trunc_normal_(self.rel_pos_w, std=0.02)
if self.rel_pos_temporal:
self.rel_pos_t = nn.Parameter(
torch.zeros(2 * input_size[0] - 1, head_dim)
)
if not rel_pos_zero_init:
trunc_normal_(self.rel_pos_t, std=0.02)
self.residual_pooling = residual_pooling
def forward(self, x, thw_shape):
B, N, _ = x.shape
if self.pool_first:
if self.mode == "conv_unshared":
fold_dim = 1
else:
fold_dim = self.num_heads
x = x.reshape(B, N, fold_dim, -1).permute(0, 2, 1, 3)
q = k = v = x
else:
assert self.mode != "conv_unshared"
if not self.separate_qkv:
qkv = (
self.qkv(x)
.reshape(B, N, 3, self.num_heads, -1)
.permute(2, 0, 3, 1, 4)
)
q, k, v = qkv[0], qkv[1], qkv[2]
else:
q = k = v = x
q = (
self.q(q)
.reshape(B, N, self.num_heads, -1)
.permute(0, 2, 1, 3)
)
k = (
self.k(k)
.reshape(B, N, self.num_heads, -1)
.permute(0, 2, 1, 3)
)
v = (
self.v(v)
.reshape(B, N, self.num_heads, -1)
.permute(0, 2, 1, 3)
)
q, q_shape = attention_pool(
q,
self.pool_q,
thw_shape,
has_cls_embed=self.has_cls_embed,
norm=self.norm_q if hasattr(self, "norm_q") else None,
)
k, k_shape = attention_pool(
k,
self.pool_k,
thw_shape,
has_cls_embed=self.has_cls_embed,
norm=self.norm_k if hasattr(self, "norm_k") else None,
)
v, v_shape = attention_pool(
v,
self.pool_v,
thw_shape,
has_cls_embed=self.has_cls_embed,
norm=self.norm_v if hasattr(self, "norm_v") else None,
)
if self.pool_first:
q_N = (
numpy.prod(q_shape) + 1
if self.has_cls_embed
else numpy.prod(q_shape)
)
k_N = (
numpy.prod(k_shape) + 1
if self.has_cls_embed
else numpy.prod(k_shape)
)
v_N = (
numpy.prod(v_shape) + 1
if self.has_cls_embed
else numpy.prod(v_shape)
)
q = q.permute(0, 2, 1, 3).reshape(B, q_N, -1)
q = (
self.q(q)
.reshape(B, q_N, self.num_heads, -1)
.permute(0, 2, 1, 3)
)
v = v.permute(0, 2, 1, 3).reshape(B, v_N, -1)
v = (
self.v(v)
.reshape(B, v_N, self.num_heads, -1)
.permute(0, 2, 1, 3)
)
k = k.permute(0, 2, 1, 3).reshape(B, k_N, -1)
k = (
self.k(k)
.reshape(B, k_N, self.num_heads, -1)
.permute(0, 2, 1, 3)
)
N = q.shape[2]
attn = (q * self.scale) @ k.transpose(-2, -1)
if self.rel_pos_spatial:
attn = cal_rel_pos_spatial(
attn,
q,
k,
self.has_cls_embed,
q_shape,
k_shape,
self.rel_pos_h,
self.rel_pos_w,
)
if self.rel_pos_temporal:
attn = cal_rel_pos_temporal(
attn,
q,
self.has_cls_embed,
q_shape,
k_shape,
self.rel_pos_t,
)
attn = attn.softmax(dim=-1)
x = attn @ v
if self.residual_pooling:
if self.has_cls_embed:
x[:, :, 1:, :] += q[:, :, 1:, :]
else:
x = x + q
x = x.transpose(1, 2).reshape(B, -1, self.dim_out)
x = self.proj(x)
if self.drop_rate > 0.0:
x = self.proj_drop(x)
return x, q_shape















 1610
1610











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









