






1、利用SysTick定时器编写倒计时程序,如初始设置为2分30秒,每秒在屏幕上输出一次时间,倒计时为0后,红灯亮,停止屏幕输出,并关闭SysTick定时器的中断。
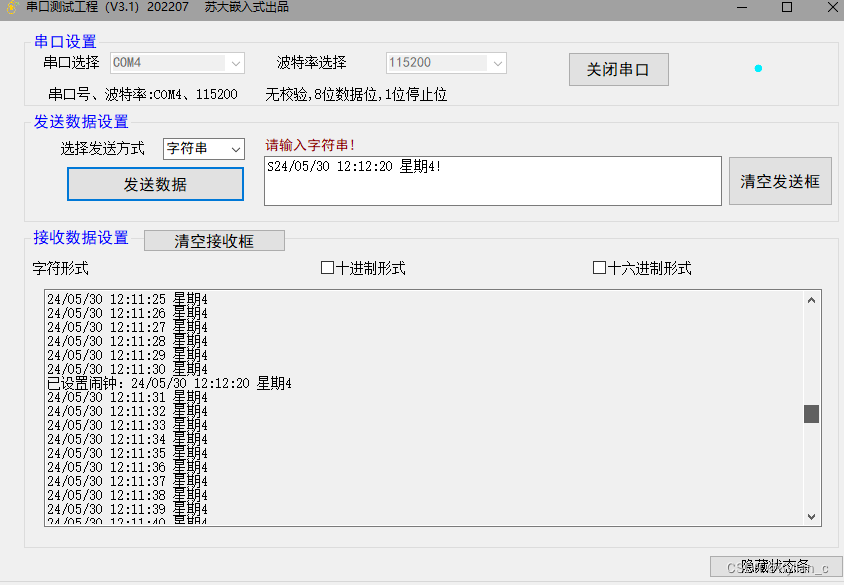
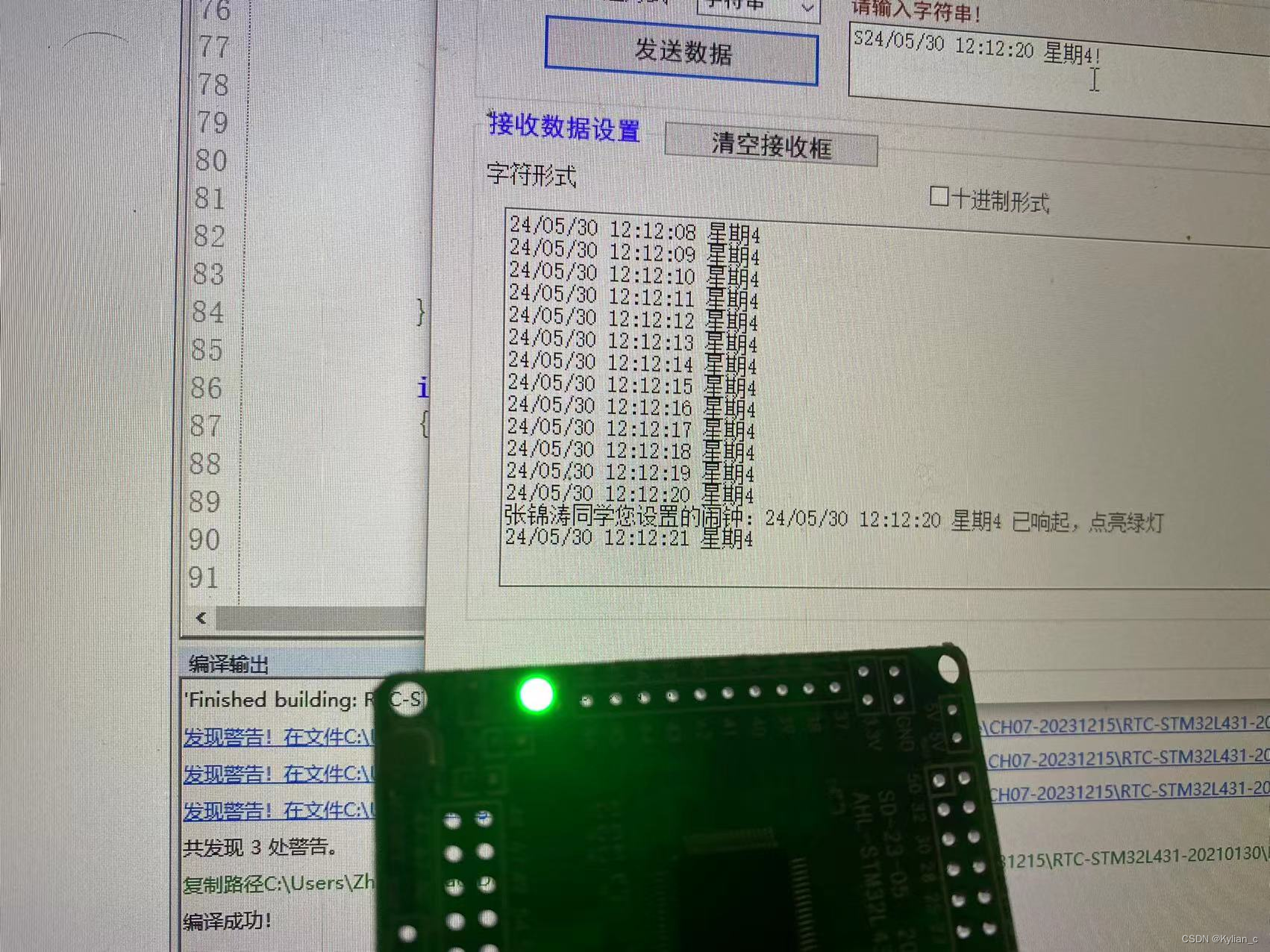
2、利用RTC显示日期(年月日、时分秒),每秒更新。并设置某个时间的闹钟。闹钟时间到时,屏幕上显示有你的姓名的文字,并点亮绿灯。
3、利用PWM脉宽调制,交替显示红灯的5个短闪和5个长闪。
4、GEC39定义为输出引脚,GEC10定义为输入引脚,用杜邦线将两个引脚相连,验证捕捉实验程序Incapture-Outcmp-20211110,观察输出的时间间隔。
1.
编写Main函数:
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
uint8_t mFlag; //主循环使用的临时变量
uint8_t mSec; //记当前秒的值
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
wdog_stop();
//(1.3)给主函数使用的局部变量赋初值
mFlag='A'; //主循环使用的临时变量:红灯状态标志
//(1.4)给全局变量赋初值
gTime[0] = 0; //时
gTime[1] = 2; //分
gTime[2] = 30; //秒
mSec = 0; //记住当前秒的值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF); //初始化红灯熄灭
systick_init(10); //设置systick为10ms中断
//(1.6)使能模块中断
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("------------------------------------------------------\n");
printf("计科211 32106100049 张锦涛 \n");
printf(" (1)红灯在倒计时为0时点亮\n");
printf(" (2)每1s中断触发SysTick定时器中断处理程序一次。 \n");
printf(" (3)进入SysTick定时器中断处理程序后,静态变量10ms单元+1, \n");
printf(" (4)达到一秒时,调用秒-1,程序,计算“时、分、秒”。 \n");
printf(" (5)使用全局变量字节型数组gTime[3],分别存储“时、分、秒”。 \n");
printf("------------------------------------------------------\n");
for(;;) //for(;;)(开头)
{
if (gTime[2] == mSec) continue;
mSec=gTime[2];
//以下是当倒计时为0时进行的操作
if (mFlag=='A' && gTime[0]==0 && gTime[1]==0&&gTime[2]==0) //若灯状态标志为'A'
{
gpio_set(LIGHT_RED,LIGHT_ON); //设置灯“亮”
printf("%d:%d:%d\n",gTime[0],gTime[1],gTime[2]);
mFlag='L'; //改变状态标志
}
else //否则,若灯状态标志不为'A'
{
gpio_set(LIGHT_RED,LIGHT_OFF); //设置灯“暗”
printf("%d:%d:%d\n",gTime[0],gTime[1],gTime[2]);
mFlag='A'; //改变状态标志
}
}
}编写中断程序isr.c中
#include "includes.h"
//声明使用到的内部函数
//isr.c使用的内部函数声明处
void SecAdd1(uint8_t *p);
void SecSub(uint8_t *p);
//=====================================================================
//函数名称:SYSTICK_USER_Handler(SysTick定时器中断处理程序)
//参数说明:无
//函数返回:无
//功能概要:(1)每10ms中断触发本程序一次;(2)达到一秒时,调用秒+1
// 程序,计算“时、分、秒”
//特别提示:(1)使用全局变量字节型数组gTime[3],分别存储“时、分、秒”
// (2)注意其中静态变量的使用
//=====================================================================
/*void SysTick_Handler()
{
//printf("***\n");
static uint8_t SysTickCount = 0;
SysTickCount++; //Tick单元+1
wdog_feed(); //看门狗“喂狗”
if (SysTickCount >= 100)
{
SysTickCount = 0;
SecAdd1(gTime);
}
}*/
void SysTick_Handler()
{
static uint8_t SysTickCount = 0;
SysTickCount ++;
wdog_feed();
if(SysTickCount >= 0)
{
SysTickCount = 0;
SecSub(gTime);
}
}
//===========================================================================
//函数名称:SecAdd1
//函数返回:无
//参数说明:*p:为指向一个时分秒数组p[3]
//功能概要:秒单元+1,并处理时分单元(00:00:00-23:59:59)
//===========================================================================
void SecAdd1(uint8_t *p)
{
*(p+2)+=1; //秒+1
if(*(p+2)>=60) //秒溢出
{
*(p+2)=0; //清秒
*(p+1)+=1; //分+1
if(*(p+1)>=60) //分溢出
{
*(p+1)=0; //清分
*p+=1; //时+1
if(*p>=24) //时溢出
{
*p=0; //清时
}
}
}
}
void SecSub(uint8_t *p)
{
if(*(p+2)>=1) //若秒不为0时,自减
{
*(p+2)-=1; //秒-1
}
else //当秒为0时候,向分借位
{
if(*(p+1)>=1) //若分不为0时候自减
{
*(p+2)=59;
*(p+1)-=1;
}
if(*(p+1)<=0) //若分为0时,向时借位
{
if(*p>=1)
{
*(p+1)=59;
*p-=1;
}
if(*p<=0) //分为0,时为0,秒也为0则清零
{
*p=0; //归零
}
}
}
}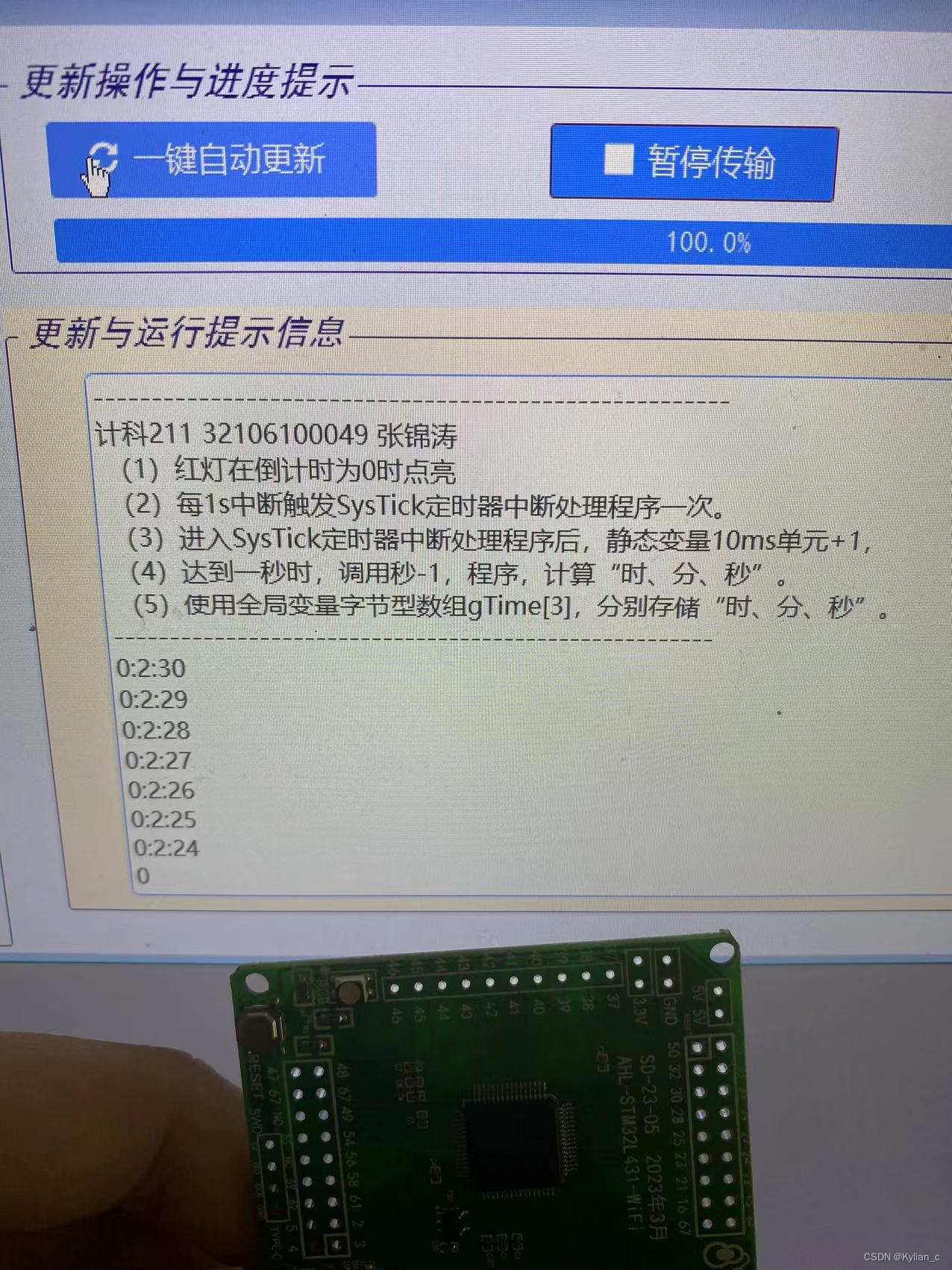

可以看出确实是直到倒计时为0时红灯开始点亮
2.
编写Main函数:
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
uint32_t mMainLoopCount; //主循环次数变量
uint8_t mFlag; //灯的状态标志
uint8_t hour,min,sec,year,month,date,week;
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mMainLoopCount=0; //主循环次数变量
mFlag='A'; //灯的状态标志
//(1.4)给全局变量赋初值
g_RTC_Flag=0;
//(1.5)用户外设模块初始化
gpio_init(LIGHT_GREEN,GPIO_OUTPUT,LIGHT_OFF); //初始化绿灯
uart_init(UART_User,115200);
RTC_Init(); //RTC初始化
RTC_Set_Time(0,0,0); //设置时间为0:0:0
RTC_Set_Date(0,0,0,0); //设置日期
//(1.6)使能模块中断
RTC_PeriodWKUP_Enable_Int(); //使能唤醒中断
uart_enable_re_int(UART_User);
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
RTC_Set_PeriodWakeUp(1); //配置WAKE UP中断,每秒中断一次
printf("------------------------------------------------------\n");
printf("计科211 32106100049 张锦涛: \n");
printf(" (1)蓝灯闪烁\n");
printf(" (2)设置日历基准时间为00/00/00 00:00:00 星期0\n");
printf(" (3)设置每秒唤醒中断,在中断输出MCU的相对时间\n");
printf(" (4)可通过User串口和RTC-测试程序C#2019改变基准时间\n");
printf("------------------------------------------------------\n");
//(1)======启动部分(结尾)==========================================
//(2)======主循环部分(开头)========================================
for(;;) //for(;;)(开头)
{
//(2.1)主循环次数变量+1
mMainLoopCount++;
//(2.2)未达到主循环次数设定值,继续循环
if (mMainLoopCount<=12888999) continue;
//(2.3)达到主循环次数设定值,执行下列语句,进行灯的亮暗处理
//(2.3.1)清除循环次数变量
mMainLoopCount=0;
if(g_RTC_Flag==1) //根据串口接收的数据设置基准时间
{
g_RTC_Flag=0;
gcRTC_Date_Time.Year=(uint8_t)((gcRTCBuf[1]-'0')*10+(gcRTCBuf[2]-'0'));
gcRTC_Date_Time.Month=(uint8_t)((gcRTCBuf[4]-'0')*10+(gcRTCBuf[5]-'0'));
gcRTC_Date_Time.Date=(uint8_t)((gcRTCBuf[7]-'0')*10+(gcRTCBuf[8]-'0'));
gcRTC_Date_Time.Hours=(uint8_t)((gcRTCBuf[10]-'0')*10+(gcRTCBuf[11]-'0'));
gcRTC_Date_Time.Minutes=(uint8_t)((gcRTCBuf[13]-'0')*10+(gcRTCBuf[14]-'0'));
gcRTC_Date_Time.Seconds=(uint8_t)((gcRTCBuf[16]-'0')*10+(gcRTCBuf[17]-'0'));
gcRTC_Date_Time.Weekday=(uint8_t)((gcRTCBuf[23]-'0'));
RTC_Set_Time(gcRTC_Date_Time.Hours,gcRTC_Date_Time.Minutes,gcRTC_Date_Time.Seconds); //设置时间
RTC_Set_Date(gcRTC_Date_Time.Year,gcRTC_Date_Time.Month,gcRTC_Date_Time.Date,gcRTC_Date_Time.Weekday); //设置日期
}
if(g_RTC_Flag==2) //根据串口接收的数据设置闹钟
{
g_RTC_Flag=0;
gcRTC_Date_Clock.Year=(uint8_t)((gcRTCBuf[1]-'0')*10+(gcRTCBuf[2]-'0'));
gcRTC_Date_Clock.Month=(uint8_t)((gcRTCBuf[4]-'0')*10+(gcRTCBuf[5]-'0'));
gcRTC_Date_Clock.Date=(uint8_t)((gcRTCBuf[7]-'0')*10+(gcRTCBuf[8]-'0'));
gcRTC_Date_Clock.Hours=(uint8_t)((gcRTCBuf[10]-'0')*10+(gcRTCBuf[11]-'0'));
gcRTC_Date_Clock.Minutes=(uint8_t)((gcRTCBuf[13]-'0')*10+(gcRTCBuf[14]-'0'));
gcRTC_Date_Clock.Seconds=(uint8_t)((gcRTCBuf[16]-'0')*10+(gcRTCBuf[17]-'0'));
gcRTC_Date_Clock.Weekday=(uint8_t)((gcRTCBuf[23]-'0'));
char *p=NumToStr("已设置闹钟:%02d/%02d/%02d %02d:%02d:%02d 星期%d\n",gcRTC_Date_Clock.Year,gcRTC_Date_Clock.Month,gcRTC_Date_Clock.Date,gcRTC_Date_Clock.Hours,gcRTC_Date_Clock.Minutes,gcRTC_Date_Clock.Seconds,gcRTC_Date_Clock.Weekday);
uart_send_string(UART_User,p); //在串口工具中返回输出已设置好的闹钟时间
}
RTC_Get_Date(&year,&month,&date,&week); //获取RTC记录的日期
RTC_Get_Time(&hour,&min,&sec); //获取RTC记录的时间
if(year == gcRTC_Date_Clock.Year && month == gcRTC_Date_Clock.Month && date == gcRTC_Date_Clock.Date && week == gcRTC_Date_Clock.Weekday && hour == gcRTC_Date_Clock.Hours && min == gcRTC_Date_Clock.Minutes &&sec == gcRTC_Date_Clock.Seconds)
{
//当达到闹钟设定好的时间时,闹钟响起
char *p=NumToStr("张锦涛同学您设置的闹钟:%02d/%02d/%02d %02d:%02d:%02d 星期%d 已响起,点亮绿灯\n",year,month,date,hour,min,sec,week);
uart_send_string(UART_User,p);//将该信息传递给串口
gpio_set(LIGHT_GREEN,LIGHT_ON); //点亮绿灯
}
//(2.3.2)如灯状态标志mFlag为'L',灯的闪烁次数+1并显示,改变灯状态及标志
if (mFlag=='L') //判断灯的状态标志
{
mFlag='A'; //灯的状态标志
gpio_set(LIGHT_BLUE,LIGHT_ON); //灯“亮”
}
//(2.3.3)如灯状态标志mFlag为'A',改变灯状态及标志
else
{
mFlag='L'; //灯的状态标志
gpio_set(LIGHT_BLUE,LIGHT_OFF); //灯“暗”
}
} //for(;;)结尾
//(2)======主循环部分(结尾)========================================
} //main函数(结尾)编写isr.c:(主要任务是对闹钟设置进行组帧操作)
#include "includes.h"
void User_SysFun(uint8_t ch);
uint8_t CreateFrame(uint8_t Data,uint8_t * buffer); //组帧函数声明
void UART_User_Handler(void)
{
//(1)变量声明
uint8_t flag,ch;
DISABLE_INTERRUPTS; //关总中断
//(2)未触发串口接收中断,退出
if(!uart_get_re_int(UART_User)) goto UART_User_Handler_EXIT;
//(3)收到一个字节,读出该字节数据
ch = uart_re1(UART_User,&flag); //调用接收一个字节的函数
if(!flag) goto UART_User_Handler_EXIT; //实际未收到数据,退出
//(4)以下代码根据是否使用模板提供的User串口通信帧结构,及是否利用User串口
// 进行带有设备序列号的进行程序更新而选择
//(4.1)【自行组帧使用(开始)】
if(CreateFrame(ch,gcRTCBuf)) //在这里增加一个设置闹钟的组帧
{
if(gcRTCBuf[0]=='?') //当头帧为?时表示设置的时间为当前的时间
{
g_RTC_Flag=1;
}
if(gcRTCBuf[0]=='S') //当头帧为S时候表示设置的时间为闹钟的时间
{
g_RTC_Flag=2;
}
}
UART_User_Handler_EXIT:
ENABLE_INTERRUPTS;//开总中断
}
//内部函数
void User_SysFun(uint8_t ch)
{
//(1)收到的一个字节参与组帧
if(gcRecvLen == 0) gcRecvLen =useremuart_frame(ch,(uint8_t*)gcRecvBuf);
//(2)字节进入组帧后,判断gcRecvLen=0?若为0,表示组帧尚未完成,
// 下次收到一个字节,再继续组帧
if(gcRecvLen == 0) goto User_SysFun_Exit;
//(3)至此,gcRecvLen≠0,表示组帧完成,gcRecvLen为帧的长度,校验序列号后(与
// 根据Flash中倒数一扇区开始的16字节进行比较)
// gcRecvBuf[16]进行跳转
if(strncmp((char *)(gcRecvBuf),(char *)((MCU_SECTOR_NUM-1)*MCU_SECTORSIZE+
MCU_FLASH_ADDR_START),16) != 0)
{
gcRecvLen = 0; //恢复接收状态
goto User_SysFun_Exit;
}
//(4)至此,不仅收到完整帧,且序号比较也一致, 根据命令字节gcRecvBuf[16]进行跳转
//若为User串口程序更新命令,则进行程序更新
switch(gcRecvBuf[16]) //帧标识
{
case 0:
SYSTEM_FUNCTION((uint8_t *)(gcRecvBuf+17));
gcRecvLen = 0; //恢复接收状态
break;
default:
break;
}
User_SysFun_Exit:
return;
}
//======================================================================
//程序名称:RTC_WKUP_IRQHandler
//函数参数:无
//中断类型:RTC闹钟唤醒中断处理函数
//======================================================================
void RTC_WKUP_IRQHandler(void)
{
uint8_t hour,min,sec;
uint8_t year,month,date,week;
char *p;
if(RTC_PeriodWKUP_Get_Int()) //唤醒中断的标志
{
RTC_PeriodWKUP_Clear(); //清除唤醒中断标志
RTC_Get_Date(&year,&month,&date,&week); //获取RTC记录的日期
RTC_Get_Time(&hour,&min,&sec); //获取RTC记录的时间
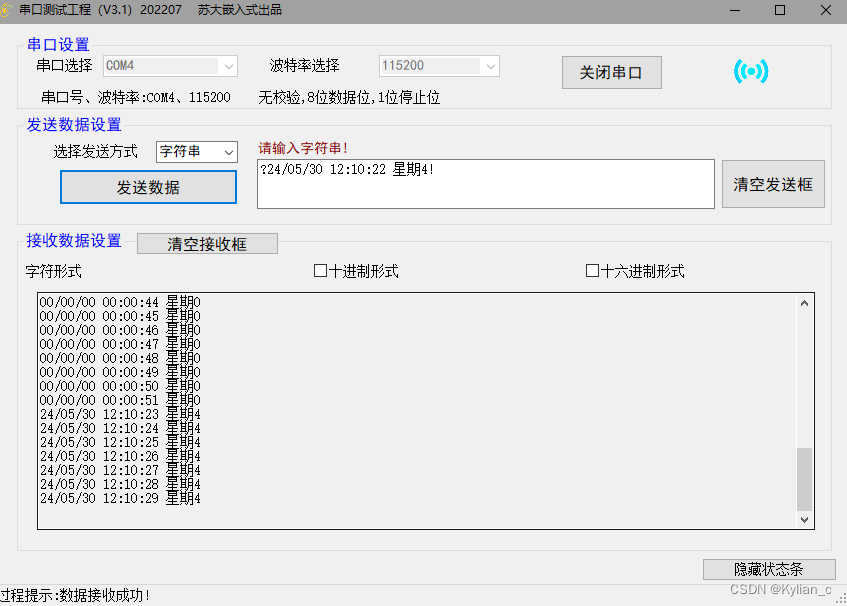
p=NumToStr("%02d/%02d/%02d %02d:%02d:%02d 星期%d\n",year,month,date,hour,min,sec,week);
uart_send_string(UART_User,p);
printf("%02d/%02d/%02d %02d:%02d:%02d 星期%d\n",year,month,date,hour,min,sec,week);
}
}
//======================================================================
//程序名称:RTC_Alarm_IRQHandler
//中断类型:RTC闹钟中断处理函数
//======================================================================
void RTC_Alarm_IRQHandler(void)
{
if(RTC_Alarm_Get_Int(A)) //闹钟A的中断标志位
{
RTC_Alarm_Clear(A); //清闹钟A的中断标志位
printf("This is ALARM_A!!!\n");
}
if(RTC_Alarm_Get_Int(B)) //闹钟A的中断标志位
{
RTC_Alarm_Clear(B); //清闹钟A的中断标志位
printf("This is ALARM_B!!!\n");
}
}
//内部调用函数
//===========================================================================
//函数名称:CreateFrame
//功能概要:组建数据帧,将待组帧数据加入到数据帧中
//参数说明:Data:待组帧数据
// buffer:数据帧变量
//函数返回:组帧状态 0-组帧未成功,1-组帧成功
//===========================================================================
uint8_t CreateFrame(uint8_t Data,uint8_t * buffer)
{
static uint8_t frameLen=0; //帧的计数器
uint8_t frameFlag; //组帧状态
frameFlag=0; //组帧状态初始化
//根据静态变量frameLen组帧
switch(frameLen)
{
case 0: //第一个数据
{
if (Data=='?' || Data == 'S') //收到数据是帧头FrameHead
{
buffer[0]=Data;
frameLen++;
frameFlag=0; //组帧开始
}
break;
}
default: //其他情况
{
//如果接收到的不是帧尾
if(frameLen>=1 && Data!='!')
{
buffer[frameLen]=Data;
frameLen++;
break;
}
//若是末尾数据则组帧成功
if(Data=='!')
{
buffer[frameLen]=Data;
frameFlag=1; //组帧成功
frameLen=0; //计数清0,准备重新组帧
break;
}
}
}
return frameFlag; //返回组帧状态
}
3.
Main函数:
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
void Delay_ms(uint16_t u16ms);
int main(void)
{
uint8_t mFlag; //灯的状态标志
uint8_t Flag; //希望采集的电平高低标志
double m_duty; //占空比
uint32_t m_i; //控制在未知周期内不同占空比的波形只打印有限次
uint8_t m_K; //确保每次能正确打印输出PWM波形
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
Flag=1;
mFlag=0; //灯的状态标志
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF); //初始化红灯
pwm_init(PWM_USER,1500,1000,10.0,PWM_CENTER,PWM_MINUS); //PWM输出初始化
//(1.6)使能模块中断
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("------------------------------------------------------\n");
printf("计科211 张锦涛 32106100049: \n");
printf(" (1)红灯以不同亮暗程度交替闪烁\n");
printf(" (2)串口输出PWM的高低电平\n");
printf(" (3)可通过PWM-测试程序-C#2019观察波形变化\n");
printf("------------------------------------------------------\n");
//for(;;) { } //在此打桩,理解蓝色发光二极管为何亮起来了?
//(1)======启动部分(结尾)==========================================
//(2)======主循环部分(开头)=========================================
m_K=0;
m_duty=0;
for (;;)
{
for (m_i = 0; m_i < 5; m_i++) //进行循环五次
{
m_duty = 10.0; //初始化占空比
pwm_update(PWM_USER, m_duty); //更新占空比
printf("高电平:1\n");
gpio_reverse(LIGHT_RED);
Delay_ms(100); //延迟 方便观察
m_duty = 0.0;
pwm_update(PWM_USER, m_duty);
printf("低电平:0\n");
gpio_reverse(LIGHT_RED);
Delay_ms(100);
}
for (m_i = 0; m_i < 5; m_i++) //进行循环五次
{
m_duty = 90.0;
pwm_update(PWM_USER, m_duty);
printf("高电平:1\n");
gpio_reverse(LIGHT_RED);
Delay_ms(500);
m_duty = 0.0;
pwm_update(PWM_USER, m_duty);
printf("低电平:0\n");
gpio_reverse(LIGHT_RED);
Delay_ms(500);
}
}
//(2)======主循环部分(结尾)========================================
}
//======以下为主函数调用的子函数存放处=====================================
//======================================================================
//函数名称:Delay_ms
//函数返回:无
//参数说明:无
//功能概要:延时 - 毫秒级
//======================================================================
void Delay_ms(uint16_t u16ms)
{
uint32_t u32ctr;
for(u32ctr = 0; u32ctr < 8000*u16ms; u32ctr++)
{
__ASM("NOP");
}
}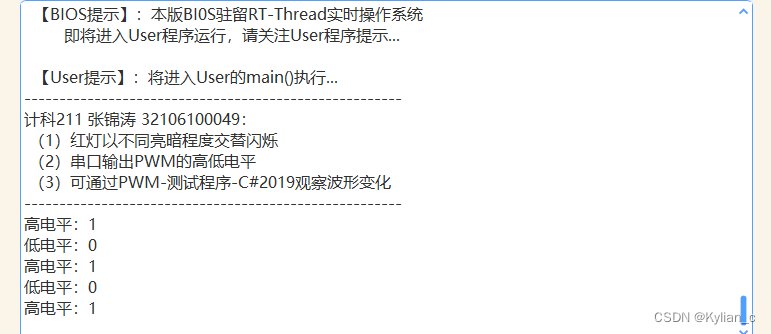
运行后发现红灯确实是按照五短五长的方式进行闪烁。
4.
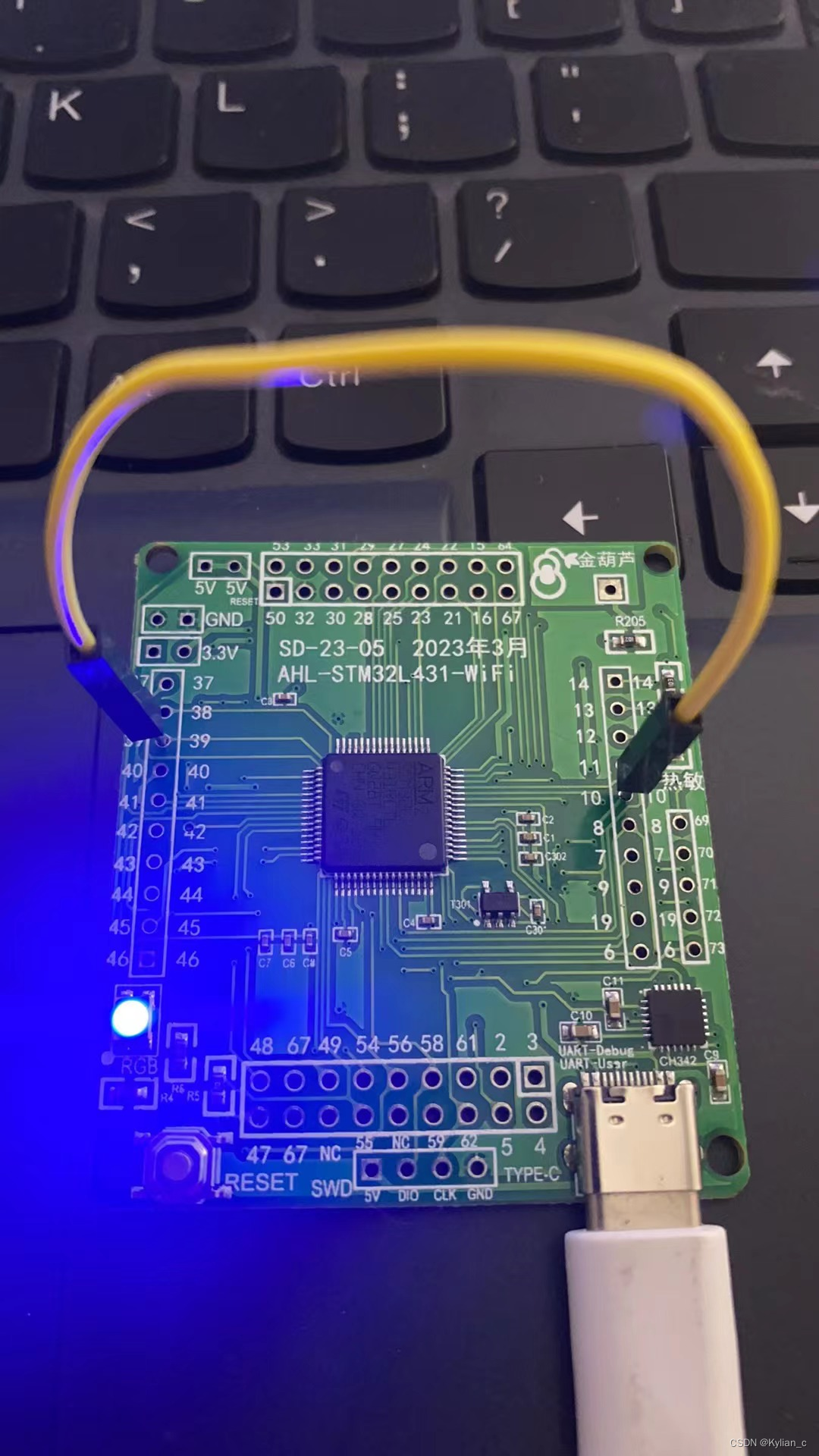
用杜邦线按照上述进行连接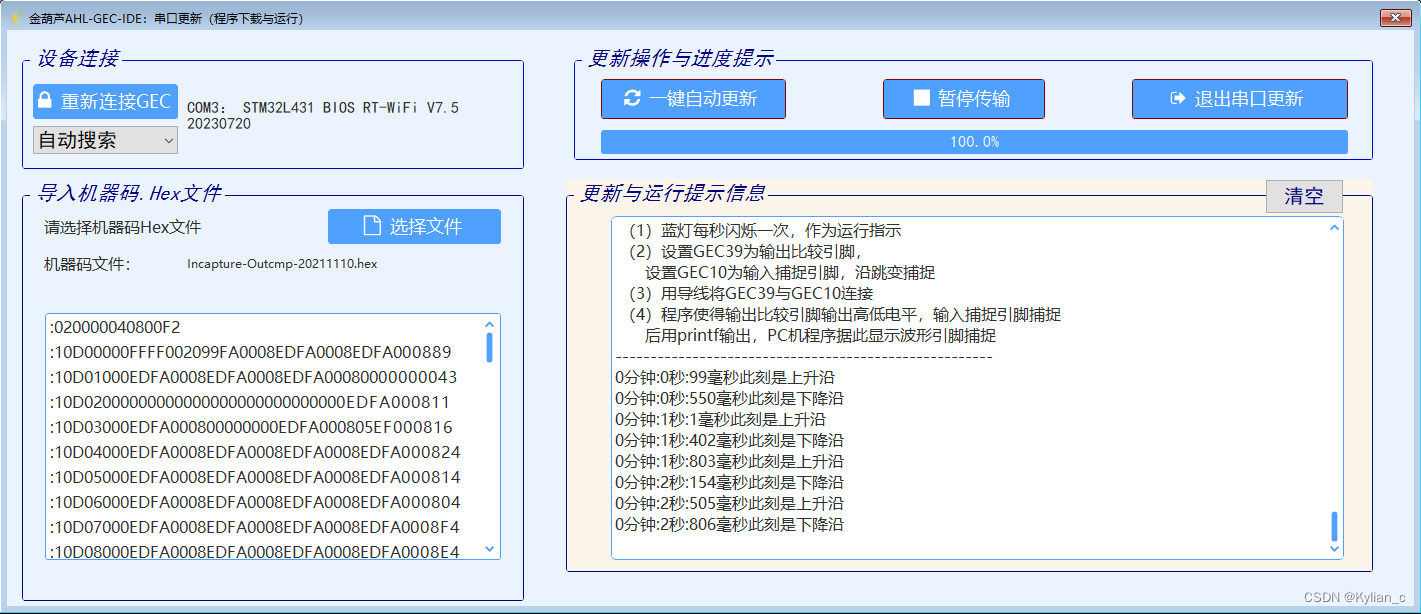
总结:
在本实验中完成了对于SysTick定时器、RTC、PWM脉宽的使用与理解;在SysTick定时器中对于systick_init(10);设置该中断时间时想当然的将10ms改为了1000ms但在查阅此函数的使用方式时却发现并没有这么简单,而且并不是将中断时间设置成1s时钟的计时就会变为1s-1的方式,因为在函数中的定义ms有范围的限制,在这方面还需要多加理解,要想在倒计时中设置成真正的每秒-1,则需要进入到systick_init函数中进行修改SysTick->LOAD = MCU_SYSTEM_CLK_MS * 1000,在这段代码中乘上1000即可。与SysTick不同的是RTC采用了实时时钟,使得具有更加精确的时间。除此之外PWM的使用让我在LED控制中通过控制输出的占空比从而实现对LED电路中电平的控制。















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









