






前言
本人经历了多次的安装,决定记录一下自己的安装过程。
提示:以下是本篇文章正文内容
一、安装虚拟机
本人使用的是windows系统,需要在电脑上安装虚拟机umware来装ubuntu系统。
这是附带的虚拟机安装包:链接:https://pan.baidu.com/s/1o9E_wuNGKEc8qKSJpq-HNQ
提取码:bu17
–来自百度网盘超级会员V5的分享
我是在某一磁盘里创建了一个umware文件夹,把下载的都放在里面。
可以参考其他博客虚拟机的安装,基本上大差不差,软件包中有许可证,可以直接复制粘贴使用。安装完成后桌面上有显示图标:

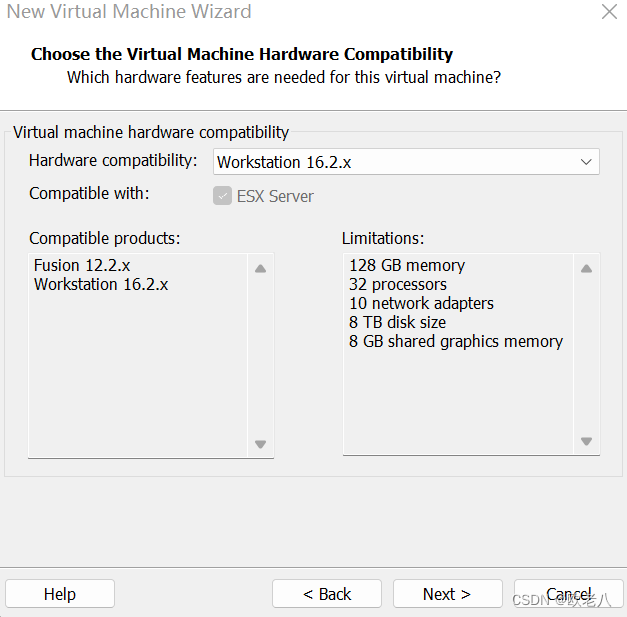
1.打开虚拟机,创建新的虚拟环境。选择第二个。

2.点击后出现,点击next
3.选择图片上的,点击next。对于ubuntu的软件包,我用的给出百度云链接。我是把软件包直接下载到umware文件夹中,不需要解压。
链接:https://pan.baidu.com/s/15OKgW8gpGxcO2c6FJioWVw
提取码:bu18
–来自百度网盘超级会员V5的分享
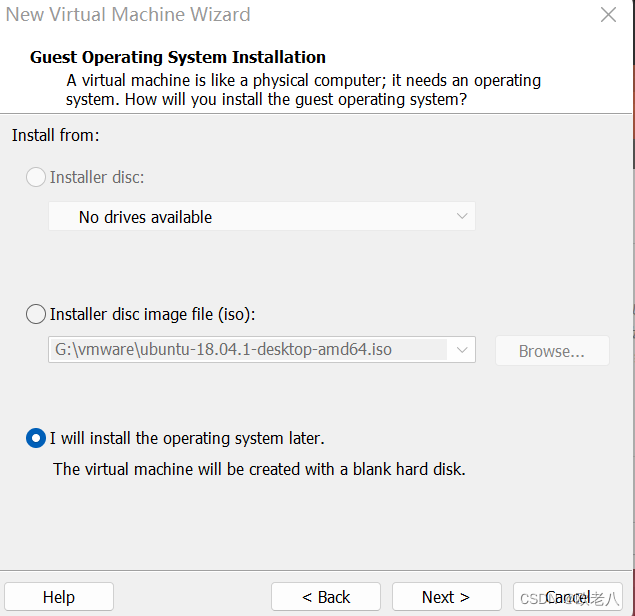
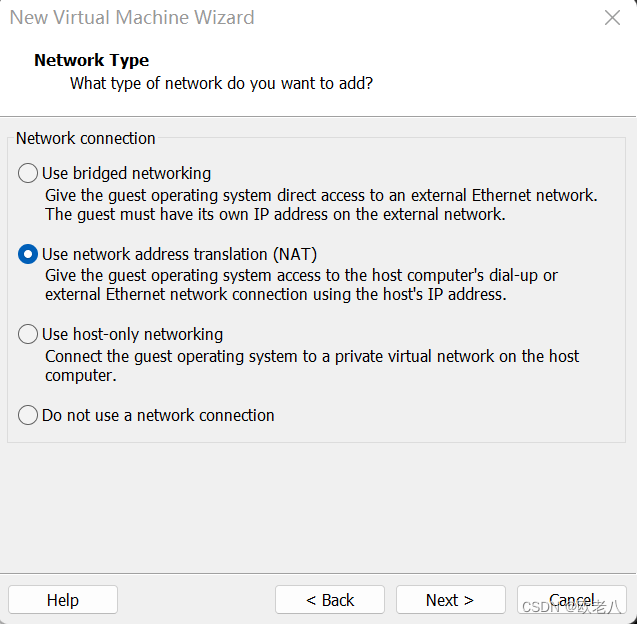
4.如图

5.选择自己的位置,我在umware中创建ubuntu18.04文件夹用来储存。
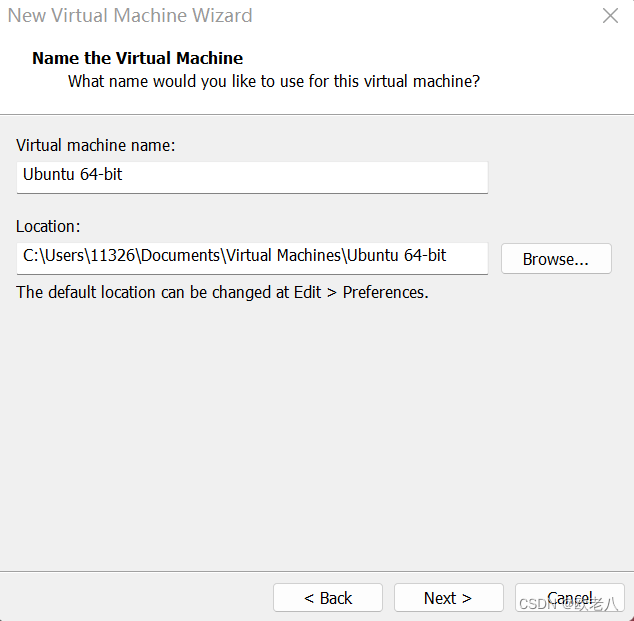
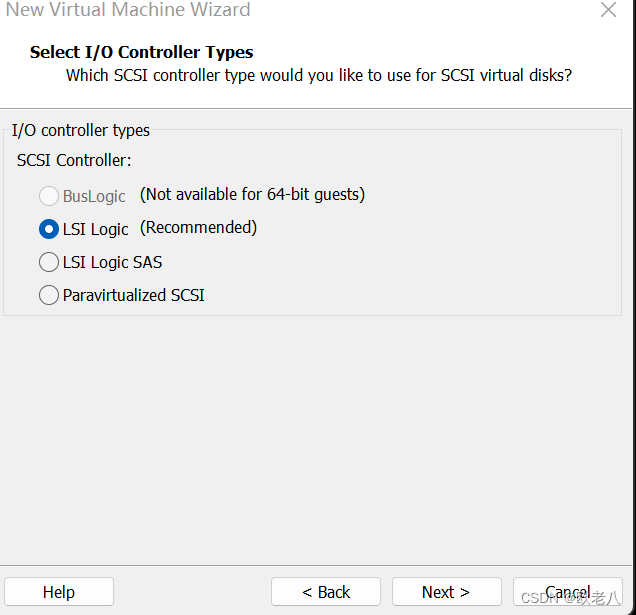
6.如图
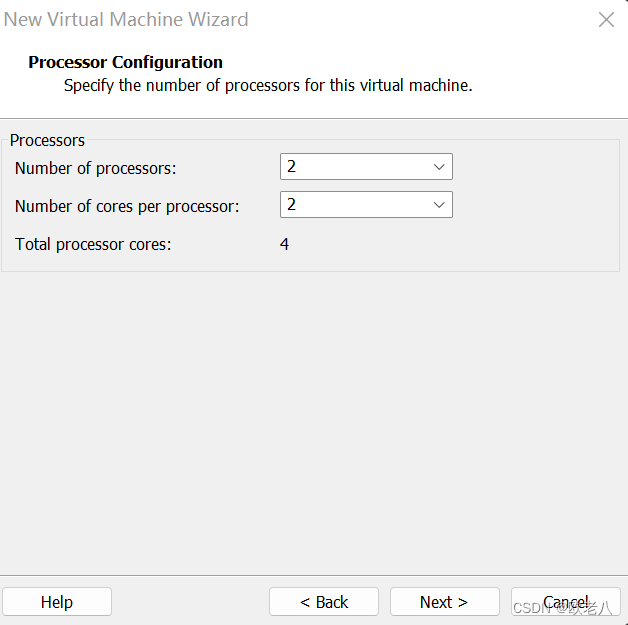
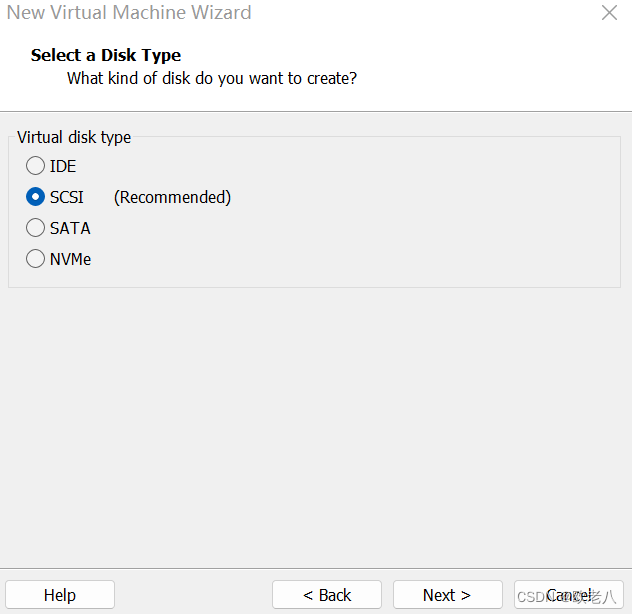
7.如图

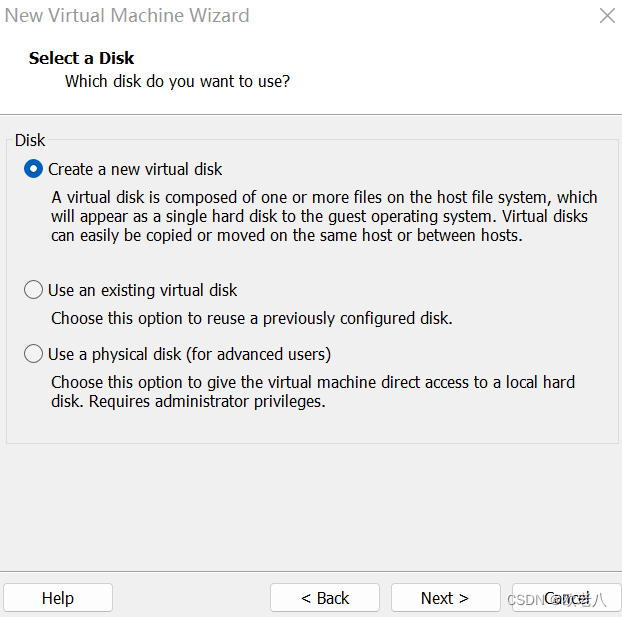
8.如图
9.如图
10.如图
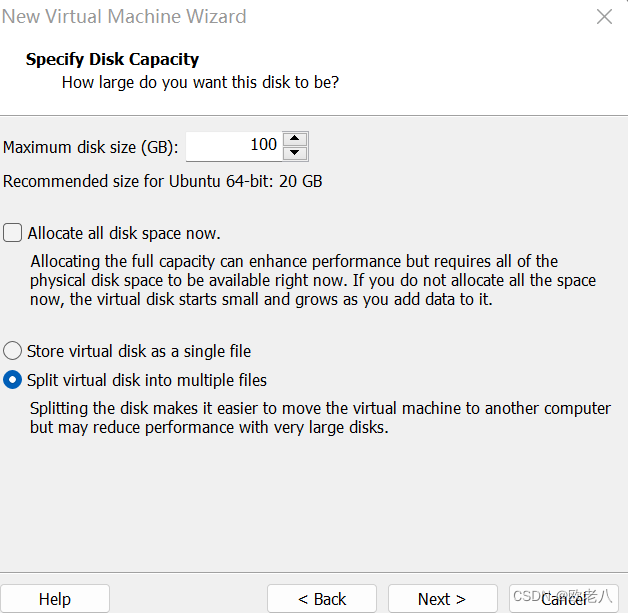
11.如图,进行创建
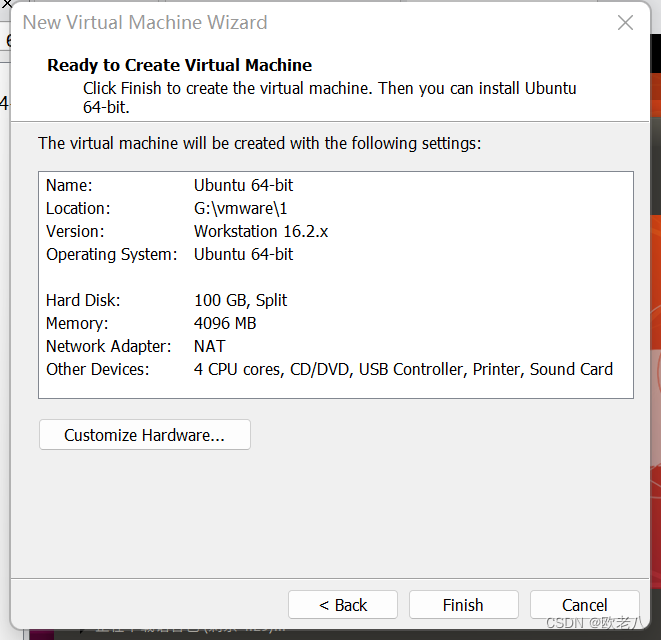
12.如图
13.如图

14.点击最左边按钮
15.打开如图
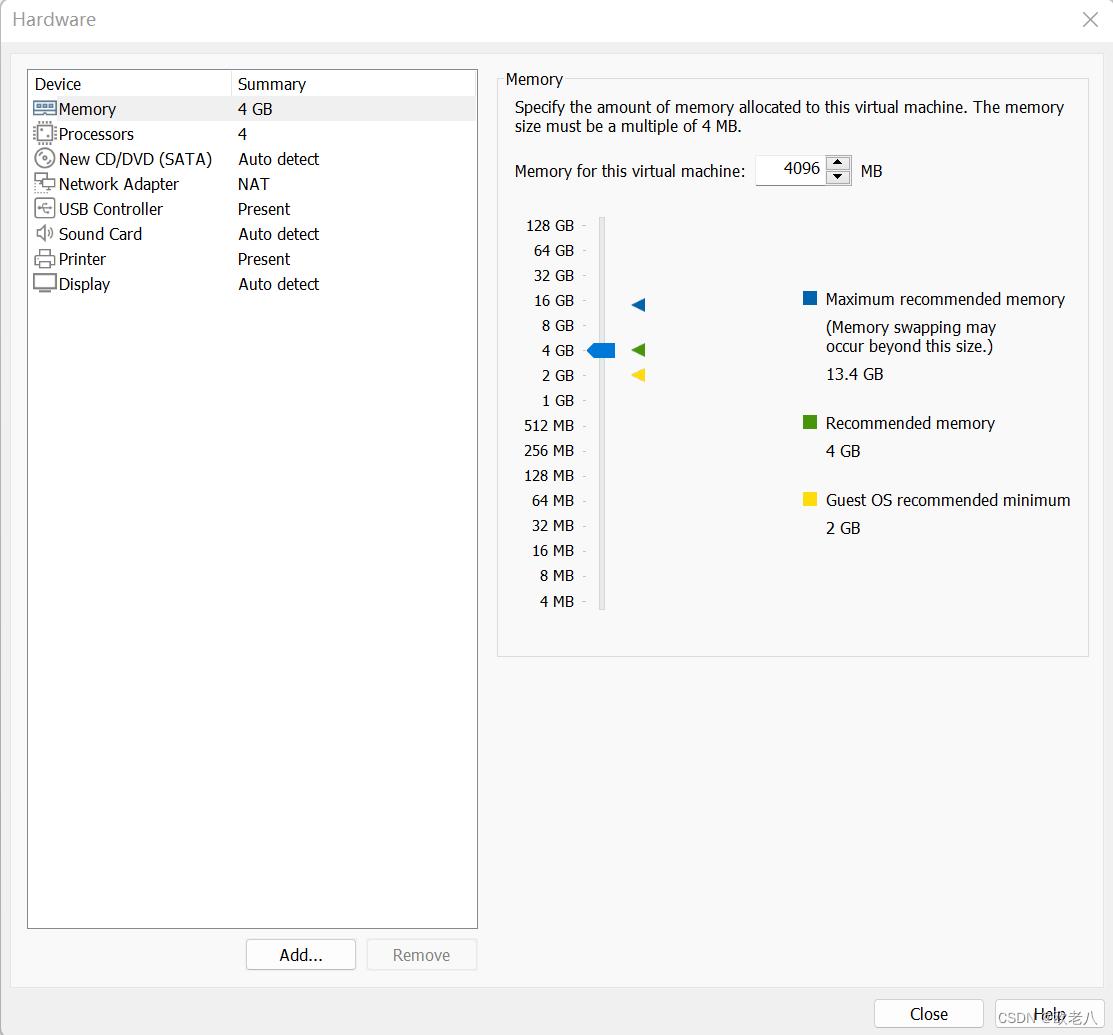
16.移除打印机,printer给remove掉
17.选择镜像包
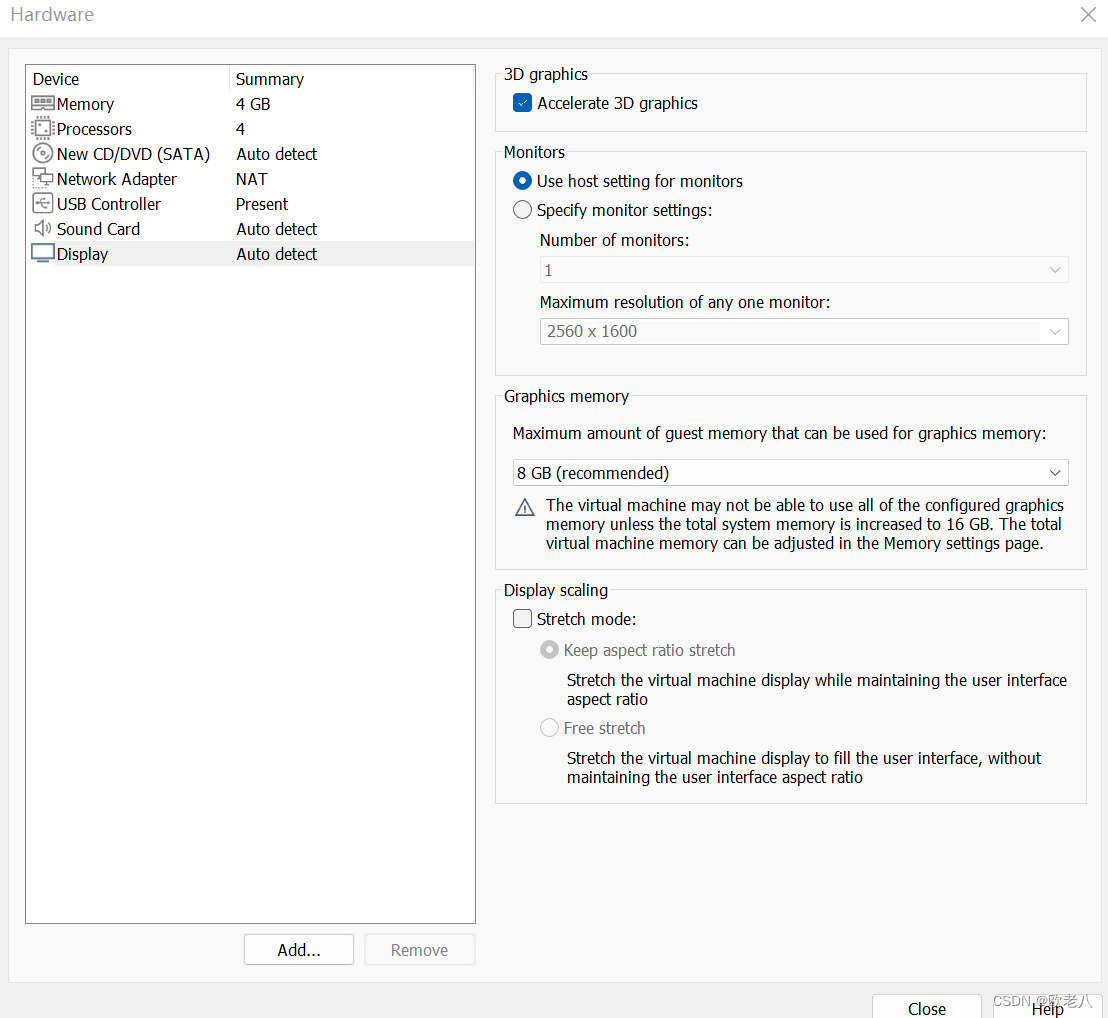
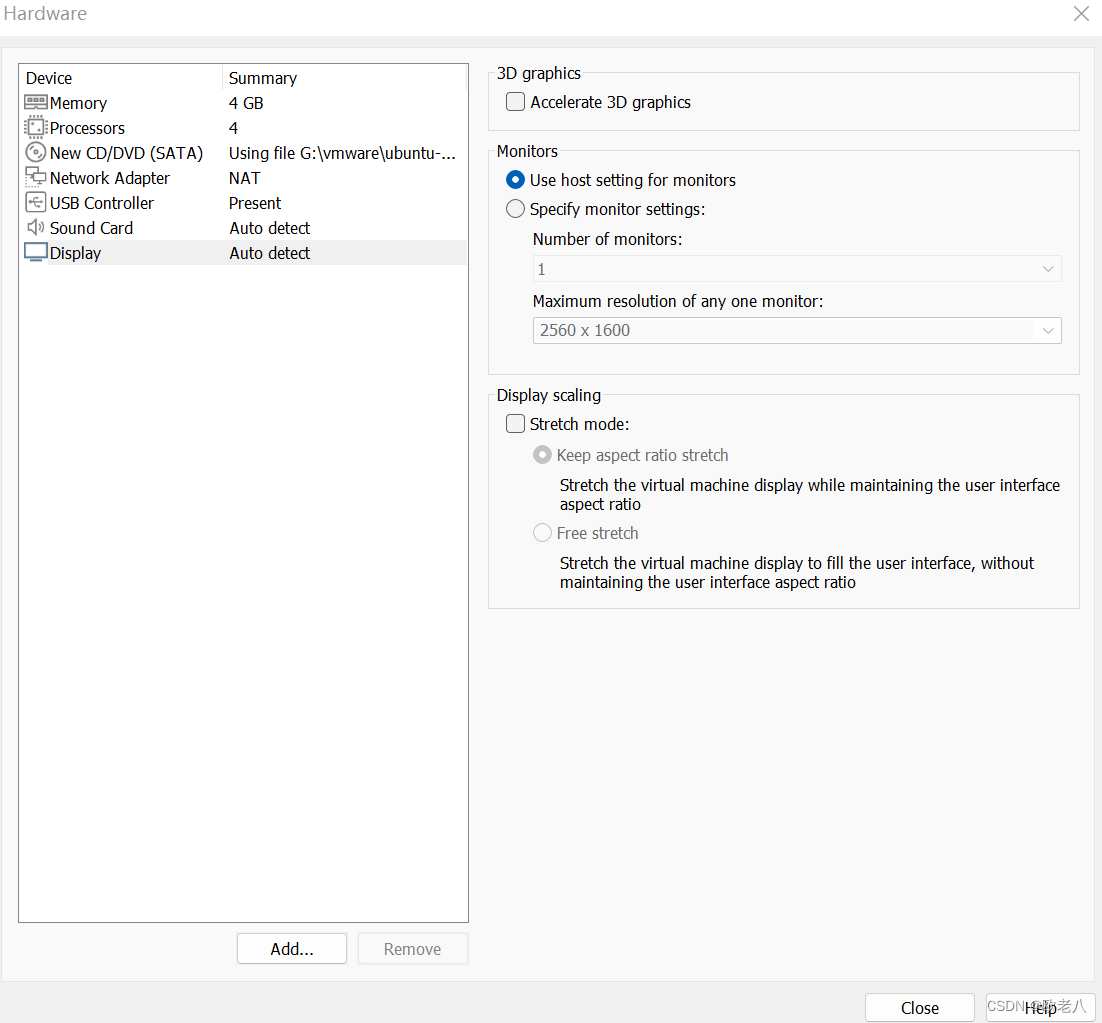
18.取消3d加速,后续可能因为点击这个出现故障,我直接把它关闭了。
19.出现这个界面
20.选择中文简体,点击安装ubuntu
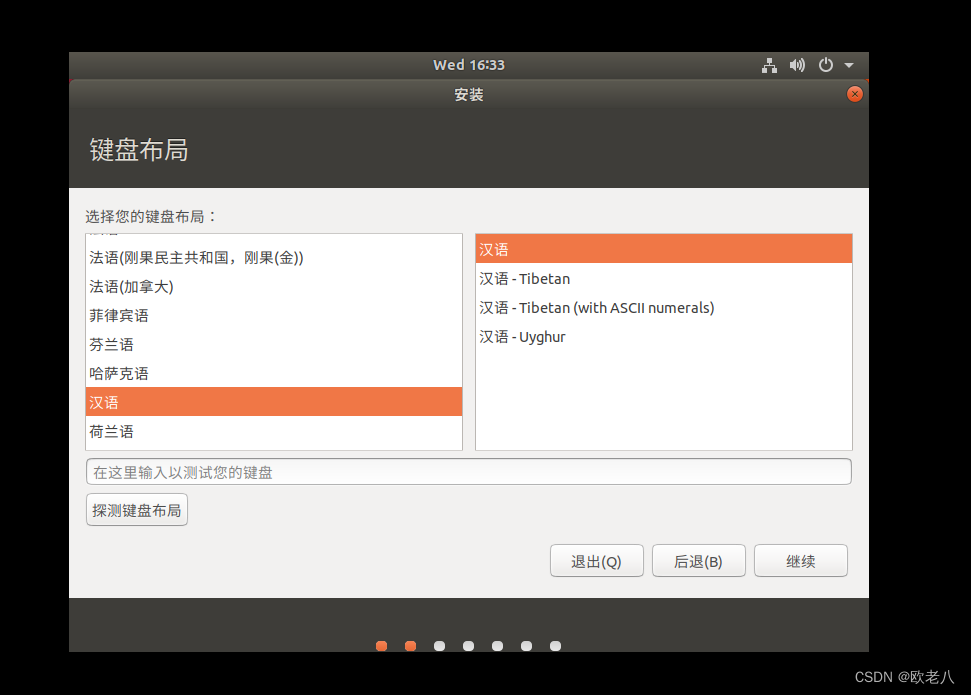
21.选择汉语,点击继续
22.继续
23.继续
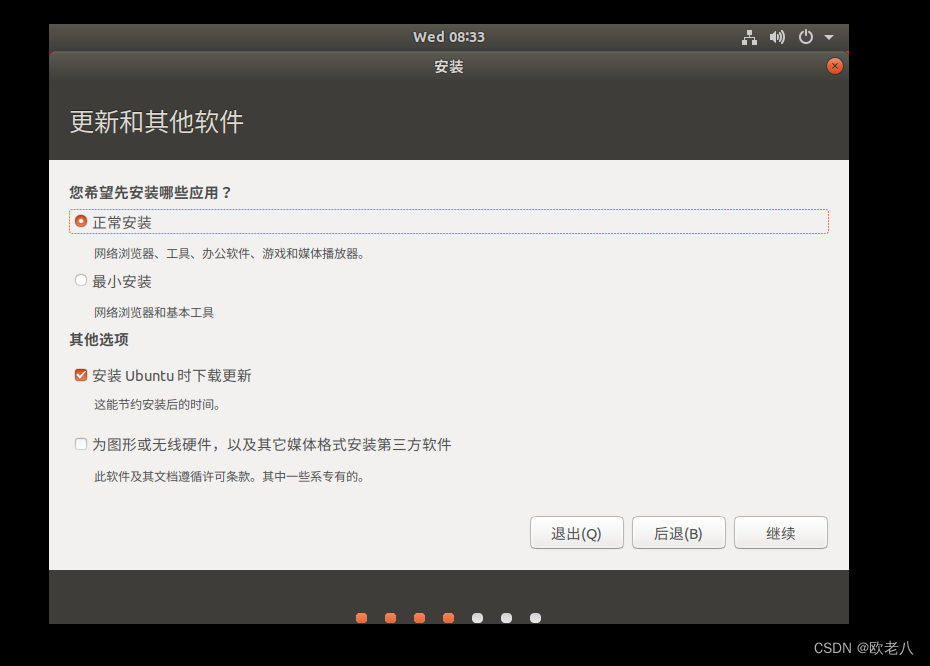
24.继续即可 25.点击继续
25.点击继续
26.设置密码
27.等待安装

28.安装完毕后,选择重启
29.出现,please remove the installation medium,the reboot。我是选择关机,再重新启动,就解决了。如果有没解决的,可以参考相关博客:https://blog.csdn.net/weixin_42081389/article/details/104072902

30.重启后,选择不升级
 31.选择更新
31.选择更新
31.选择更新软件

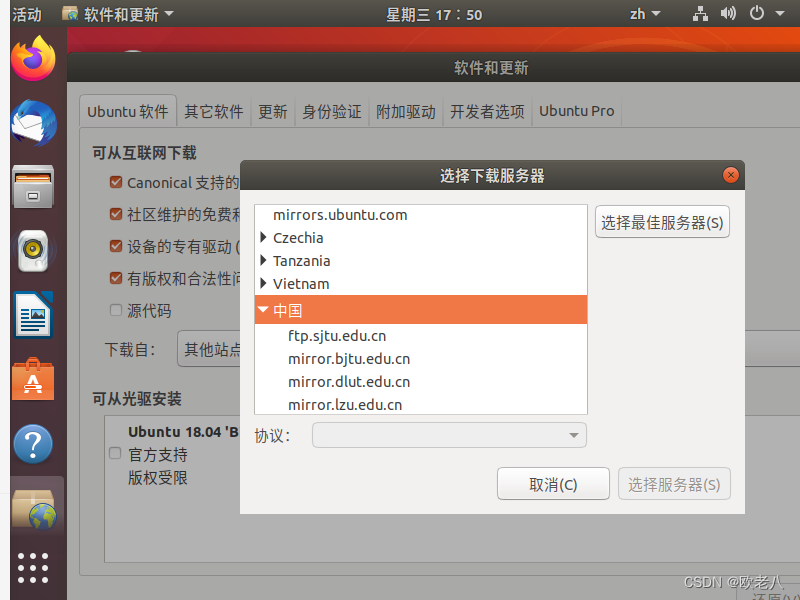
32.等待软件安装好。切换源
二、安装VM-tools
打开终端(Ctrl+Shift+T),ctrl+alt+t,手动输入以下命令,再重启ubuntu系统就可以实现。
即通过安装VMtools实现了Windows与Ubuntu跨系统复制粘贴,也实现了Ubuntu窗口自适应
代码如下):
sudo apt-get autoremove open-vm-tools
sudo apt-get install open-vm-tools
sudo apt-get install open-vm-tools-desktop
三、安装ros
18.04的ubuntu安装的ros是melodic,16.04安装的是kinetic。csdn上博主有很多这方面的介绍,大多按着步骤一步一步来是可以安装上的,后续因为一些原因,我重装过几次,最后我安装几次后发现一个最简单的就是鱼香ros,基本几分钟搞定。
参考了这位博主:https://blog.csdn.net/jianlai_/article/details/123545130
打开终端(Ctrl+Shift+T),输入下面命令:
wget http://fishros.com/install -O fishros && . fishros
之后会弹出
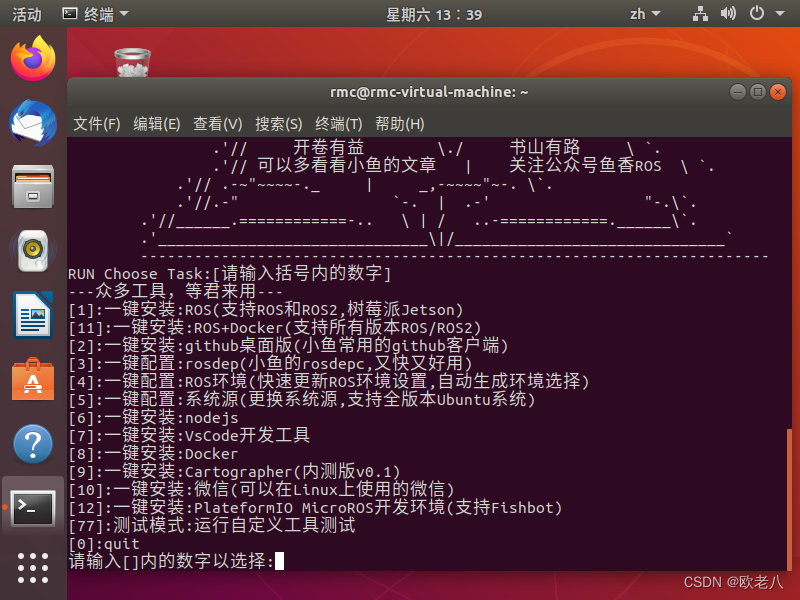
***1.***先选5,更换系统源,后续更换系统源,并删除旧源
***2.***在选1,选择对应版本,我当时是还是进行了更换源操作和删除旧源,实际上没什么影响
***3.***选3,rosdep配置,结束后输入最后提示的代码,成功后的图应该是这样的(截图是另一位博主完成后的,https://blog.csdn.net/qq_44830040/article/details/106049992)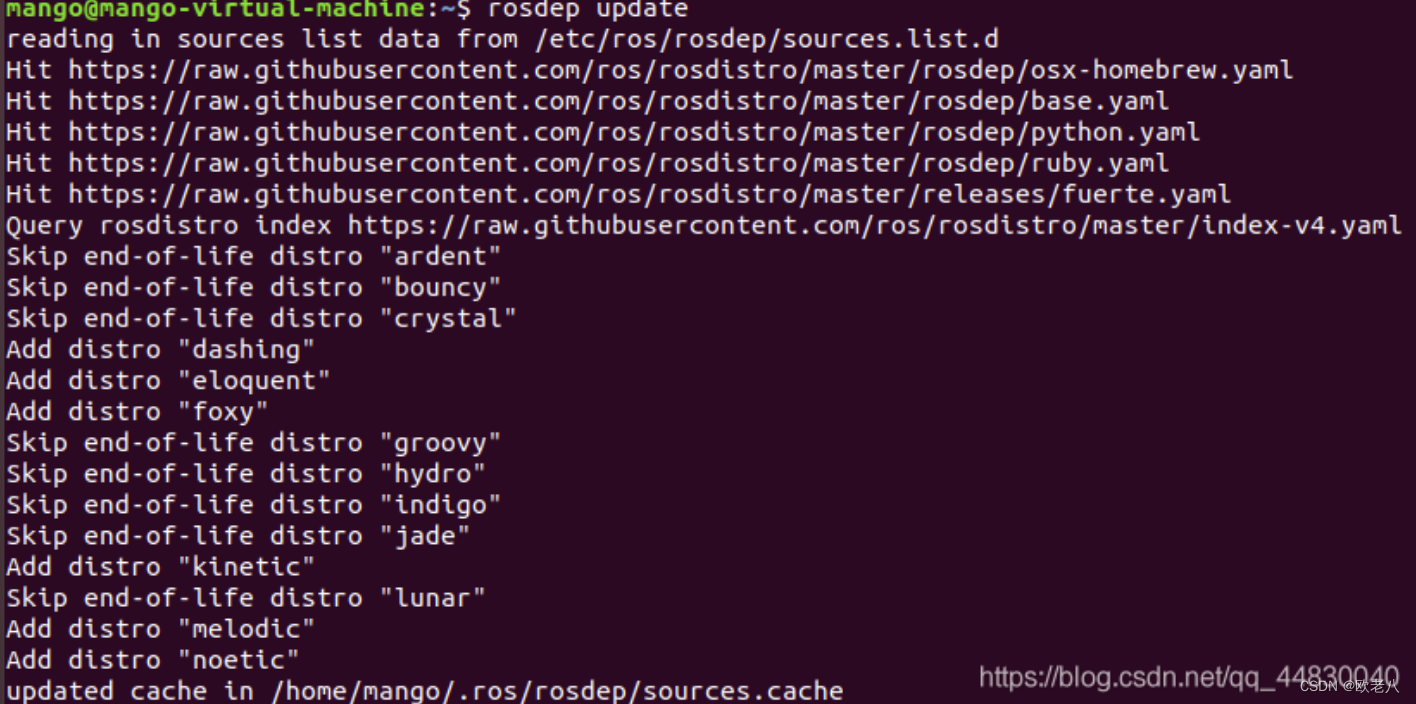
***4.***选择4,更新ros环境配置
***5.***验证是否安装好,通常用小乌龟验证
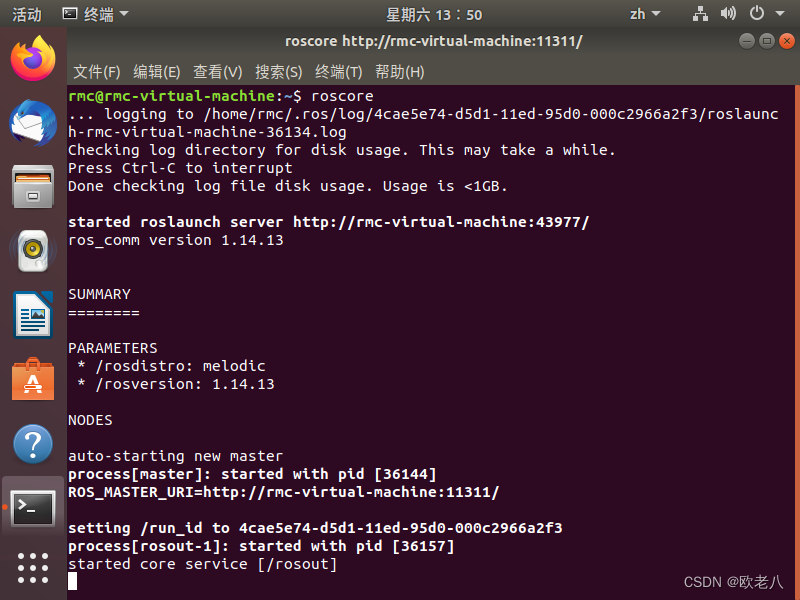
首先输入
roscore
出现
接着打开另一终端(Ctrl+Shift+T),输入
rosrun turtlesim turtlesim_node
会出现乌龟:

再打开新的终端,输入
rosrun turtlesim turtle_teleop_key
操作键盘,乌龟会移动(出现乌龟不移动,把鼠标点击最后出现的框,在移动乌龟),这样表示配置已完成。














 12万+
12万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









