







>- **🍨 本文为[🔗365天深度学习训练营](https://mp.weixin.qq.com/s/AtyZUu_j2k_ScNH6e732ow) 中的学习记录博客**
>- **🍖 原作者:[K同学啊 | 接辅导、项目定制](https://mtyjkh.blog.csdn.net/)**
>- **🚀 文章来源:[K同学的学习圈子](https://www.yuque.com/mingtian-fkmxf/zxwb45)**
理论知识储备
深度残差网络ResNet(deep residual network)在2015年由何恺明等提出,因为它简单与实用并存,随后很多研究都是建立在ResNet-50或者ResNet-101基础上完成。
ResNet主要解决深度卷积网络在深度加深时候的“退化”问题。在一般的卷积神经网络中,增大网络深度后带来的第一个问题就是梯度消失、爆炸,这个问题Szegedy提出BN层后被顺利解决。BN层能对各层的输出做归一化,这样梯度在反向层层传递后仍能保持大小稳定,不会出现过小或过大的情况。但是作者发现加了BN后再加大深度仍然不容易收敛,其提到了第二个问题--准确率下降问题:层级大到一定程度时准确率就会饱和,然后迅速下降,这种下降即不是梯度消失引起的也不是过拟合造成的,而是由于网络过于复杂,以至于光靠不加约束的放养式的训练很难达到理想的错误率。
准确率下降问题不是网络结构本身的问题,而是现有的训练方式不够理想造成的。当前广泛使用的优化器,无论是SGD,还是RMSProp,或是Adam,都无法在网络深度变大后达到理论上最优的收敛结果。
作者在文中证明了只要有合适的网络结构,更深的网络肯定会比较浅的网络效果要好。证明过程也很简单:假设在一种网络A的后面添加几层形成新的网络B,如果增加的层级只是对A的输出做了个恒等映射(identity mapping),即A的输出经过新增的层级变成B的输出后没有发生变化,这样网络A和网络B的错误率就是相等的,也就证明了加深后的网络不会比加深前的网络效果差。
图1 残差模块
何恺明提出了一种残差结构来实现上述恒等映射(图1):整个模块除了正常的卷积层输出外,还有一个分支把输入直接连到输出上,该分支输出和卷积的输出做算术相加得到最终的输出,就是个恒等映射。残差结构人为制造了恒等映射,就能让整个结构朝着恒等映射的方向去收敛,确保最终的错误率不会因为深度的变大而越来越差。如果一个网络通过简单的手工设置参数值就能达到想要的结果,那这种结构就很容易通过训练来收敛到该结果,这是一条设计复杂的网络时通用的规则。
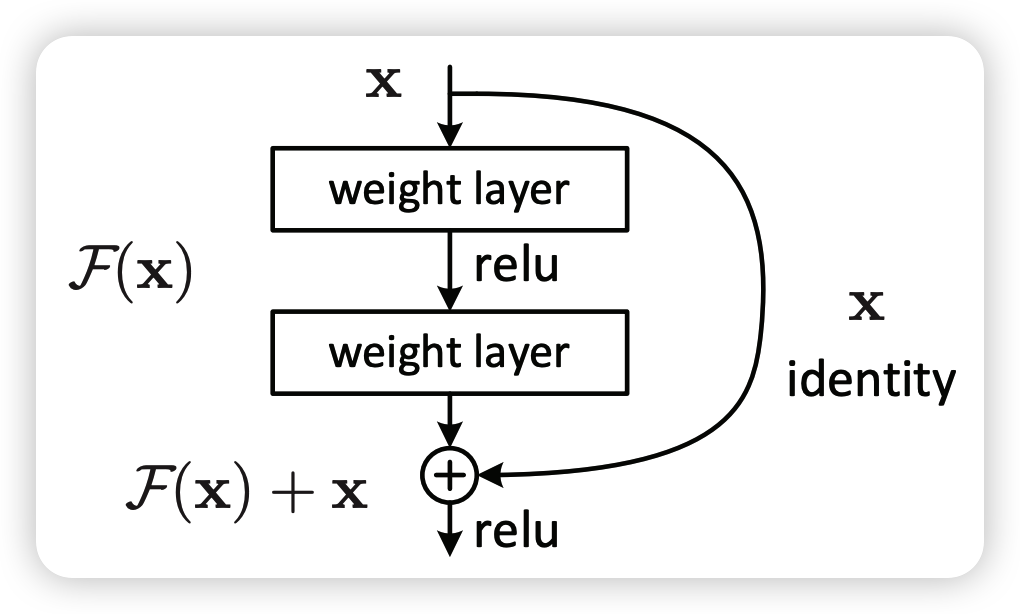
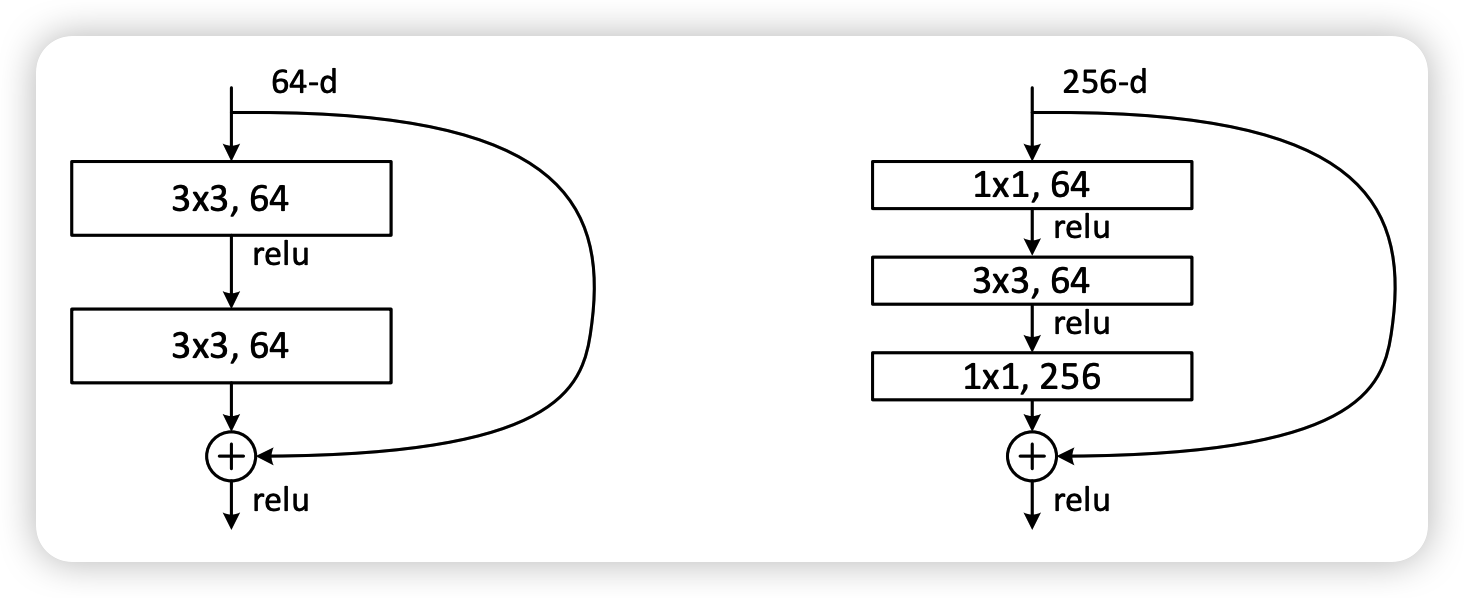
图2 两种残差单元
图2左边的单元为 ResNet 两层的残差单元,两层的残差单元包含两个相同输出的通道数的 3x3 卷积,只是用于较浅的 ResNet 网络,对较深的网络主要使用三层的残差单元。三层的残差单元又称为 bottleneck 结构,先用一个 1x1 卷积进行降维,然后 3x3 卷积,最后用 1x1 升维恢复原有的维度。另外,如果有输入输出维度不同的情况,可以对输入做一个线性映射变换维度,再连接后面的层。三层的残差单元对于相同数量的层又减少了参数量,因此可以拓展更深的模型。通过残差单元的组合有经典的 ResNet-50,ResNet-101 等网络结构。Deep Residual Learning for Image Recognition.pdf · 语雀 (yuque.com)lu
论文链接
pytorch实现
import torch
import torch.nn as nn
import torch.nn.functional as F
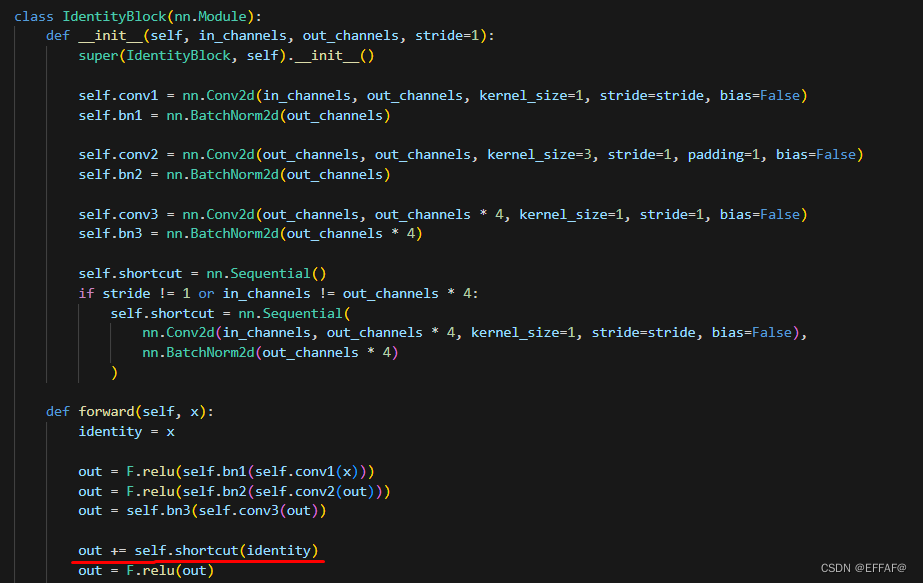
class IdentityBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(IdentityBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channels)
self.conv3 = nn.Conv2d(out_channels, out_channels * 4, kernel_size=1, stride=1, bias=False)
self.bn3 = nn.BatchNorm2d(out_channels * 4)
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != out_channels * 4:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels * 4, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels * 4)
)
def forward(self, x):
identity = x
out = F.relu(self.bn1(self.conv1(x)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
out += self.shortcut(identity)
out = F.relu(out)
return out
class ResNet50(nn.Module):
def __init__(self, num_classes=1000):
super(ResNet50, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(64, 64, 3, stride=1)
self.layer2 = self._make_layer(256, 128, 4, stride=2)
self.layer3 = self._make_layer(512, 256, 6, stride=2)
self.layer4 = self._make_layer(1024, 512, 3, stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(2048, num_classes)
def _make_layer(self, in_channels, out_channels, num_blocks, stride=1):
layers = []
layers.append(IdentityBlock(in_channels, out_channels, stride))
for _ in range(1, num_blocks):
layers.append(IdentityBlock(out_channels * 4, out_channels))
return nn.Sequential(*layers)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
model = ResNet50(len(classeNames)).to(device)
print(model)
训练集预处理
train_transforms = transforms.Compose([
transforms.Resize([224, 224]), # 将输入图片resize成统一尺寸
transforms.RandomHorizontalFlip(), # 随机水平翻转
transforms.ToTensor(), # 将PIL Image或numpy.ndarray转换为tensor,并归一化到[0,1]之间
transforms.Normalize( # 标准化处理-->转换为标准正太分布(高斯分布),使模型更容易收敛
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]) # 其中 mean=[0.485,0.456,0.406]与std=[0.229,0.224,0.225] 从数据集中随机抽样计算得到的。
])
total_data = datasets.ImageFolder(data_dir,transform=train_transforms)
total_data训练结果
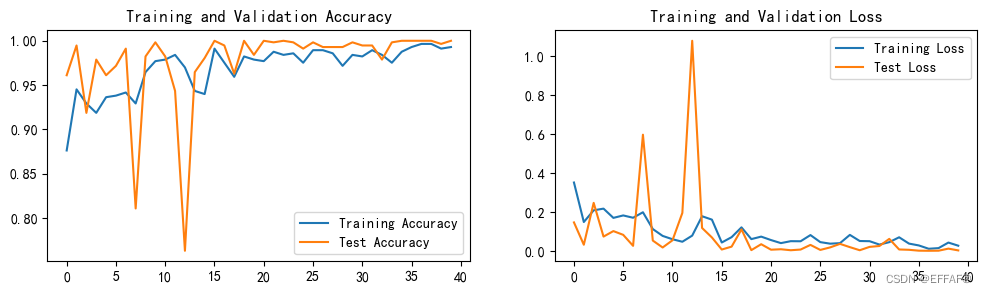
残差网络:
VGG网络: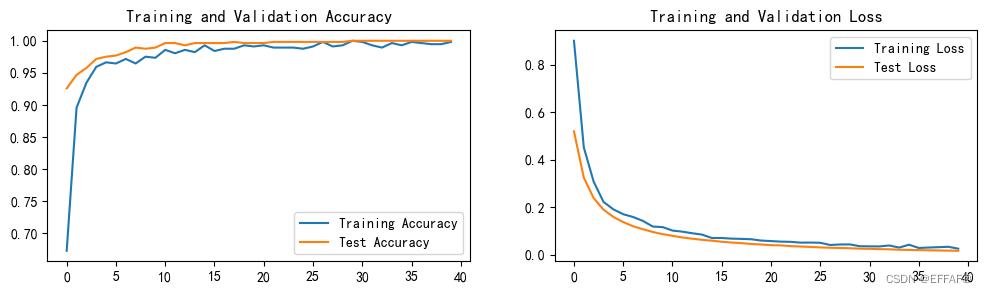
:
总结
这次学习实践,认为深刻理解了残差网络的恒等变换是怎么样实现,是什么原理。
并且认识到残差网络和VGG网络的差别















 1249
1249











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









