






1.什么是数字图像处理?
指借助数字计算机来处理数字图像。
2.数字图像处理的基本步骤?
图像获取、图像滤波和增强、图像复原、彩色图像处理、图像变换(小波变换)和压缩、形态学图像处理、图像分割、特征提取、图像模式分类。
3.数字图像系统的组成?
图像数字化设备,包括数码相机、数码摄像机、带照相和/或摄像功能的手机 等
图像处理设备,包括计算机和存储系统
图像输出设备,包括打印机,也可以输出到Internet上的其它设备
4.图像感知与获取?
单个传感器、条带传感器、阵列传感器。
5.图像取样与量化?
取样:图像空间坐标的数字化(像素个数)
量化:图像函数值(灰度值)的数字化
非统一的图像的采样
在灰度级变化尖锐的区域,用细腻的采样, 在灰度级比较平滑的区域,用粗糙的采样
非统一的图像的量化
在边界附近使用较少的灰度级。剩余的灰度级可用于灰度级变化比较平滑的区域
避免或减少由于量化的太粗糙,在灰度级变化比较平滑的区域出现假轮廓的现象
6.数字图像的表示?
二维离散亮度函数:f(x,y),x,y说明图像像素的空间坐标
函数值 f 代表了在点(x,y)处像素的灰度 值
二维矩阵:A[m,n]
m,n说明图像的宽和高。矩阵元素a(i,j)的值,表示图像在第i行,第j列的像素的灰度值;i,j表示几何位置
图像描述信息:图像高度和宽度等 信息
图像数据:顺序存放的连续数据
BMP格式:1.位图文件头2.位图信息头3.调色板4.图像数据
7.图像的质量?
层次:表示图像实际拥有的灰度级的数量(灰度级:表示像素明暗程度的整数量)
对比度:是指一幅图像中灰度反差的大小 (对比度=最大亮度/最小亮度)
清晰度:清晰度相关的主要因素(亮度,对比度,尺寸大小,细微层次,颜色饱和度)
8.像素间的一些基本关系?
像素的邻域:邻域是指一个像元(x,y)的邻近(周围)形成的像元集合。
相邻像素:4邻域(像素块坐标的上下左右坐标),D邻域(像素块坐标的左上角…右下角坐标),8邻域(4邻域和D邻域)
连通性:是描述区域和边界的重要概念
两个像素连通的两个必要条件是:两个像素的位置是否相邻,两个像素的灰度值是否相等
4连通,8连通:(满足相邻像素的性质即连通),m连通(在4邻域中或在D邻域中并且两个的4/D邻域不相交)
通路:两像素坐标之间的路径,若坐标相等就是闭合通路
距离:对于像素p(x,y)、q(s,t)、z(u,v),如果
(1) D(p,q)≥0(D(p,q)=0,当且仅当p=q),
(2) D(p,q)=D(q,p)
(3)D(p,z)≤D(p,q)+D(q,z) 则称D是距离函数或度量
欧式距离定义:像素p(x,y)和q(s,t)间的欧式距离定义如下:
D (p,q) =[(x-s)2 +(y-t)2]^1/2
D4距离(城市距离):p(x,y)和q(s,t)之间的D4距离定义为:
D4(p,q)=|x–s|+|y–t|
D8距离(棋盘距离):p(x,y)和q(s,t)之间的D8距离定义为:
D8(p,q)=max(|x–s|,|y–t|)
9图像增强分为两类:
图像增强:通过某种技术有选择地突出对某一具体应用有用的信息,削弱或抑制一些无用的信息
空间域增强:对图像的像素直接处理g(x,y)=T[f(x,y)]简化形式s=T(r)
频域增强:修改图像的傅里叶变换
点运算:反转变换:s=(L-1)-r ([0,L-1]为图像的灰度级。作用:黑的变白,白的变黑)
对数变换:s=clog(1+r))(灰度压缩)
伽马变换:s=crγ(c和γ是正常数)
γ<1提高灰度级,使图像变亮
γ>1降低灰度级,使图像变暗
对比度拉伸、灰度级切片
位平面切片:分解为位平面,可以分析每一位在图像中的相对重要性
代数运算:
算术运算
加:C(x,y)=A(x,y)+B(x,y),应用:去除叠加性噪声、生成图像叠加效果
减:C(x,y)=A(x,y)-B(x,y),应用:显示两幅图像的差异,检测同一场景两幅图像之间的变化、去除不需要的叠加性图案、图像分割
乘:C(x,y)=A(x,y)*B(x,y),应用:图像的局部显示 用二值蒙板图像与原图像做乘法
除:(一幅图像取反和另一幅图像相乘)
逻辑运算
非:g(x,y) = 255-f(x,y),应用:获得一个阴图像,获得一个子图像的补图像
与:g(x,y) = f(x,y)Ùh(x,y),应用:求两个子图像的相交子图
或:g(x,y) = f(x,y) v h(x,y),应用:合并子图像,模板运算:提取感兴趣的子图像
异或:g(x,y)=f(x,y) Åh(x,y),应用:获得相交子图像
直方图运算:
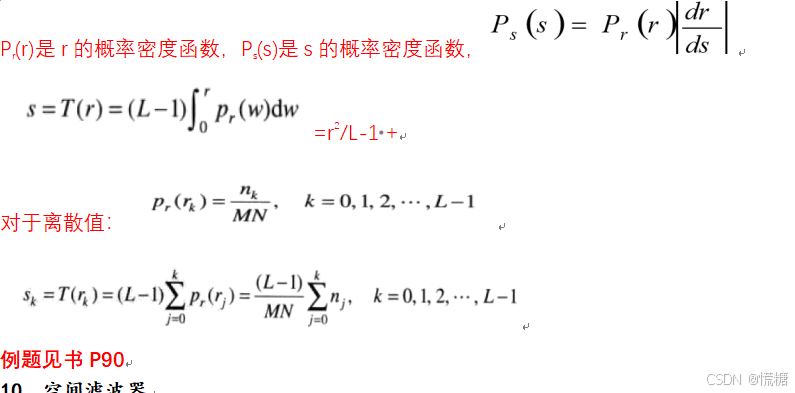
一个灰度级在范围[0,L-1]的数字图像的直方图是一个离散函数
p(rk)= nk/n(nk是图像中灰度级为rk的像素个数,rk 是第k个灰度级,k = 0,1,2,…,L-1,n是图像的像素总数)
直方图均衡化:
基本思想是把原始图的直方图变换为均匀分布的形式,从而达到增强图像整体对比度的效果
使用的方法是灰度级变换:s=T(r)
T(r)在区间0≤r≤1中为单值且单调递增,保证原图各灰度级在变换后仍保持排列次序
当0≤r≤1时,0≤T(r) ≤1,保证变换前后灰度值动态范围的一致性
步骤:
Pr(r)是r的概率密度函数,Ps(s)是s的概率密度函数
10.空间滤波器
空间滤波和空间滤波器的定义
使用空间模板进行的图像处理,被称为空间滤波。模板本身被称为空间滤波器
空间滤波的简化形式:
w是滤波器系数,z是与该系数对应的图像灰度值,mn为滤波器中包含的像素点总数
平滑空间滤波器的作用:
模糊处理:去除图像中一些不重要的细节;减小噪声
平滑空间滤波器的分类:
线性滤波器:均值滤波器(包含在滤波器邻域内像素的平均值)
作用:
减小图像灰度的“尖锐”变化,减小噪声
由于图像边缘是由图像灰度尖锐变化引起的,所以也存在边缘模糊的问题
非线性滤波器(统计排序滤波器):最大值滤波器、中值滤波器、最小值滤波器
统计排序滤波器:是一种非线性滤波器,基于滤波器所在图像区域中像素的排序,由排序结果决定的值代替中心像素的值
中值滤波器
主要用途:去除噪声
计算公式:R = mid {zk | k = 1,2,…,n}
最大值滤波器
主要用途:寻找最亮点
计算公式:R = max {zk | k = 1,2,…,n}
最小值滤波器
主要用途:寻找最暗点
计算公式:R = min {zk | k = 1,2,…,n}
中值滤波算法的特点
在去除噪音的同时,可以比较好地保留边的锐度和图像的细节(优于均值 滤波器)
能够有效去除脉冲噪声:以黑白点叠加在图像上
锐化滤波器(微分滤波器)
锐化滤波器的主要用途:
突出图像中的细节,增强被模糊了的细节、印刷中的细微层次强调。弥补扫描对图像的钝化
、超声探测成像,分辨率低,边缘模糊,通过锐化来改善、图像识别中,分割前的边缘提取
锐化处理恢复过度钝化、暴光不足的图像、尖端武器的目标识别、定位
锐化滤波器的分类
二阶微分滤波器-拉普拉斯算子
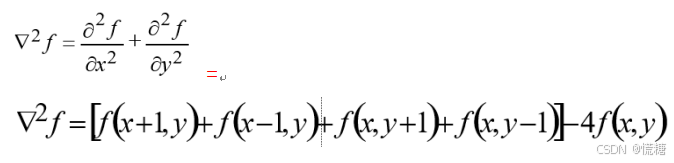
g(x, y) =f (x, y)+c[ Ñ2 f (x, y)]
g(x,y)是锐化后的图像,c=1用其他核,c=-1用拉普拉斯核(核见P119图)
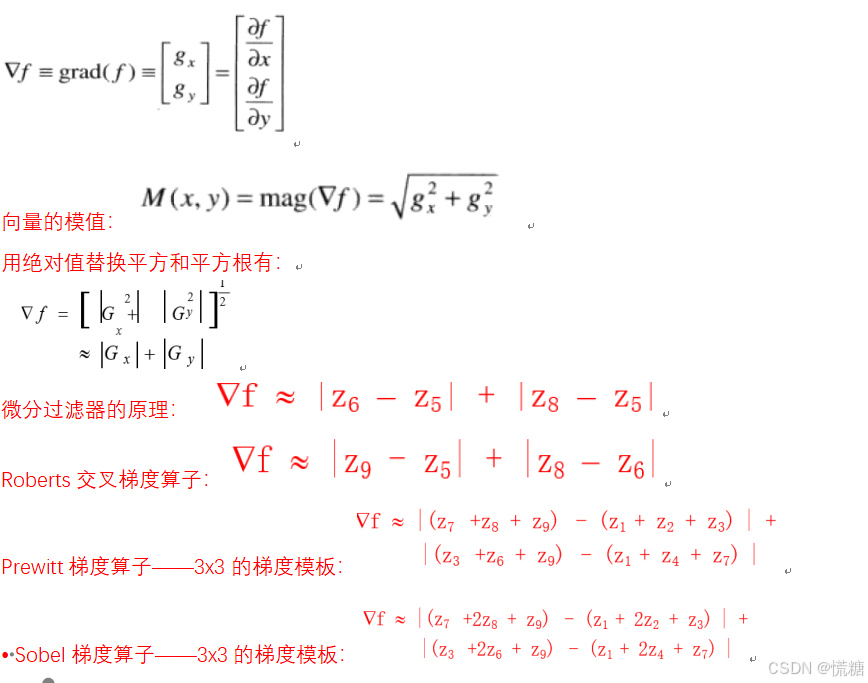
一阶微分滤波器-梯度算子
梯度通过一个二维列向量来定义
11. 图像复原/退化的模型——噪声模型
一些重要的噪声:高斯噪声、瑞利噪声、伽马(爱尔兰)噪声、指数分布噪声、均匀分布噪声、脉冲噪声(椒盐噪声)
图像复原的空间滤波器:
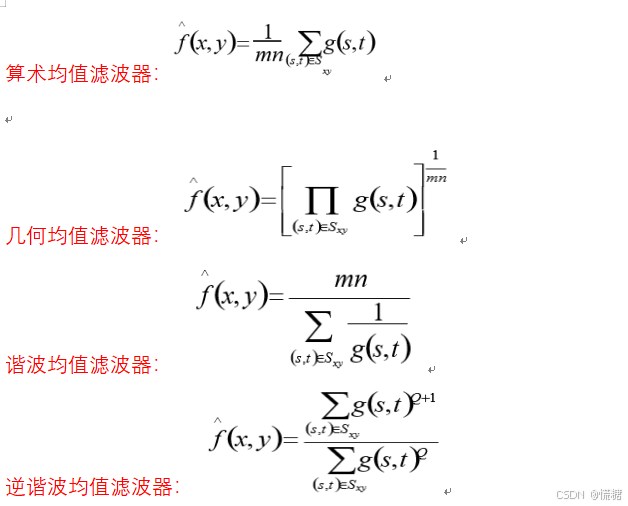
算术均值滤波器和几何均值滤波器适合于处理高斯或均匀等随机噪声
谐波均值滤波器适合于处理脉冲噪声缺点:必须事先知道噪声是暗噪声还是亮噪声,以便于选择合适的Q符号
顺序统计滤波器:
中点滤波器、中值滤波器、最大值滤波器、最小值滤波器、修正后的阿尔法均值滤波器
自适应滤波器:自适应中值滤波器
12.彩色图像处理
彩色图像处理可分为:
ü全彩色处理:数码相机、数码摄像机、彩色扫描仪
ü伪彩色处理:对不同的灰度或灰度范围赋予不同的颜色
描述彩色光的3个基本量:
辐射率:从光源流出能量的总量,用瓦特(W) 度量
光强:观察者从光源接收的能量总和
亮度:主观描绘子
三原色:红,绿,蓝;原色相加可产生二次色:
ü深红色:红+蓝
ü青色:绿+蓝
ü黄色:红+绿
彩色空间(也称彩色模型或彩色系统):RGB、CMY和CMYK、HIS、YIQ、YUV、YCbCr
CMY(青、深红、黄)、CMYK (青、深红、黄、黑)
HSI(色调、饱和度、亮度)
YIQ 、YUV、YCbCr( 亮度,色调)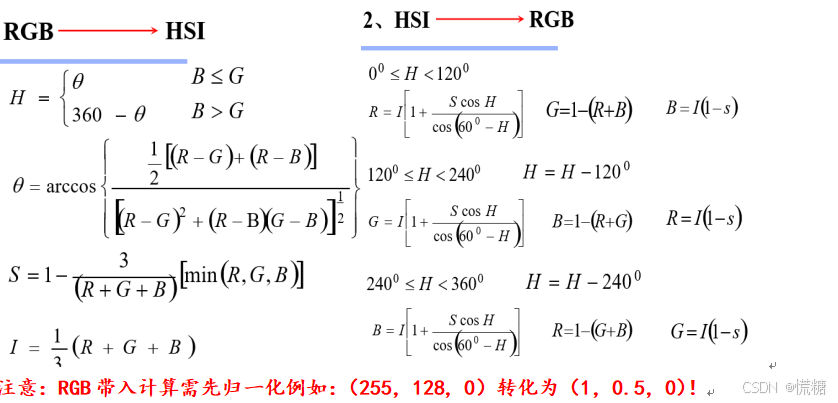 注意:RGB带入计算需先归一化例如:(255,128,0)转化为(1,0.5,0)!
注意:RGB带入计算需先归一化例如:(255,128,0)转化为(1,0.5,0)!
伪彩色图像处理:按照规定的准则对灰度值进行颜色的处理,用于区分单色图像和真彩色图像赋予彩色的处理;
怎样进行伪彩色图像处理?
强度分层技术
灰度级到彩色转换技术
全彩色图像处理基础:
分别处理每一分量图像,然后,合成彩色图像
直接对彩色像素处理:3个颜色分量表示像素 向量。
彩色变换:
彩色变换函数:g(x, y) = T [ f (x, y)]
彩色变换的简单形式:si = Ti (r1 , r2 ,..., rn )
补色:红色在补色中用青色代替,黑色在补色中用白色代替
彩色图像平滑和尖锐化
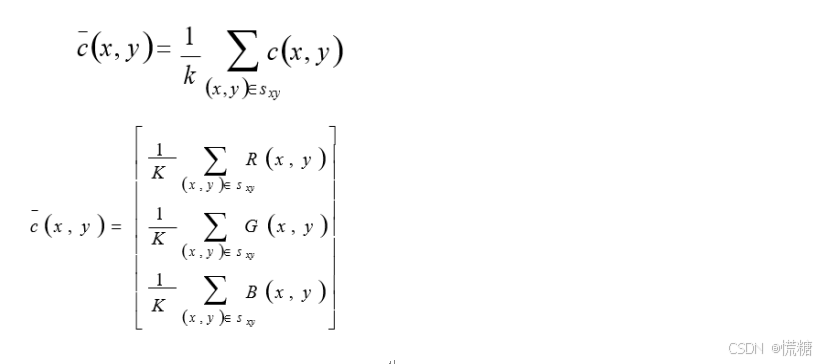
彩色图像平滑:
彩色图像尖锐化(拉普拉斯微分):g(x, y)= 5f (x, y)-[f (x+1,y)+ f (x-1,y)+ f (x, y +1)+ f (x, y-1)]
彩色分割(把一幅图像分成区域):
HSI彩色空间分割——直观:H色调图像方便描述彩色、S饱和度图像做模板分离感兴趣的特征区、I强度图像不携带彩色信息
RGB彩色空间——直接
13.图像压缩
图像的数据量通常很大,对存储、处理和传 输带来许多问题(对比视频)、不断扩大的图像应用
图像压缩的方法:消除冗余数据,一般分为两类:无损压缩、有损压缩、准无损技术
图像压缩的理论基础:信息论、图像处理的概念和技术
压缩方法:预测编码方法(对应空域方法)、变换编码方法(对应频域方法)
三种基本的数据冗余
编码冗余: 
参考例题8.1(P385)
像素间冗余
心理视觉冗余
保真度准则:图像压缩可能会导致信息损失,需要评价信息损失的测度以描述解码图像相 对于原始图像的偏离程度
常用保真度准则分为两大类:
客观保真度准则
常用的两种客观保真度准则
均方根误差、均方信噪比
主观保真度准则
图像压缩模型:
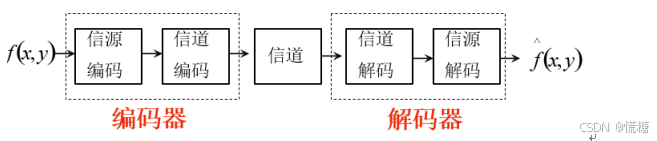
信源编码器:

减少或消除输入图像中的编码冗余、像素 间冗余及心理视觉冗余
转换器:减少像素间冗余
量化器:减少心理视觉冗余,该步操作是不可逆的
符号编码器:减少编码冗余

符号解码器:进行符号编码的逆操作
反向转换器:进行转换器的逆操作
变长编码
减少编码冗余
变长编码,即把最短的码字赋予出现概率最大的灰度级
霍夫曼编码:将需要考虑的符号概率排序,并将最低概率的符号联结为一个单一符号
、对每个化简后的信源进行编码,从最小的信源开始,一直编码到原始的信源
霍夫曼解码:解码通过查询表的方式完成
LZW编码:消除像素间冗余(看例题)
14.形态学图像处理的基本运算有4个:膨胀、腐蚀、开操作和闭操作
 腐蚀:使图像缩小 A和B是两个集合,A被B腐蚀定义为:
腐蚀:使图像缩小 A和B是两个集合,A被B腐蚀定义为:
使用腐蚀消除图像的细节部分,产生滤波器的作用
膨胀:使图像扩大A和B是两个集合,A被B膨胀定义为:
另一个定义:
表示B的反射进行平移与A的交集是A的子集
开操作:使图像的轮廓变得光滑,断开狭窄的间断和消除细的突出物
使用结构元素B对集合A进行开操作,定义为:

含义:先用B对A腐蚀,然后用B对结果膨胀
另一个定义: 
闭操作:同样使图像的轮廓变得光滑,但与开操作相反,它能消除狭窄的间断和长细的鸿沟,消除小的孔洞,并填补轮廓线中的裂痕
使用结构元素B对集合A进行闭操作,定义为:
含义:先用B对A膨胀,然后用B对结果腐蚀
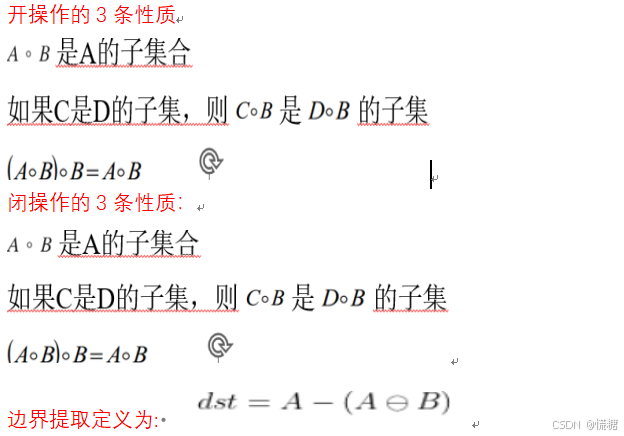 表示:先用B对A腐蚀,然后用A减去腐蚀得 到,B是结构元素
表示:先用B对A腐蚀,然后用A减去腐蚀得 到,B是结构元素
区域填充定义为:

连通分量的提取
令Y表示一个包含于集合A中的连通分量,并假设Y 中的一个点p是已知的。用下列迭代式生成Y的所有 元素:

x0=p,如果Xk=Xk-1,算法收敛,令Y=Xk

















 1606
1606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









