






STM32—独立看门狗
一、IWDG简介
1,IWDG的全称:Independent watchdog,即独立看门狗
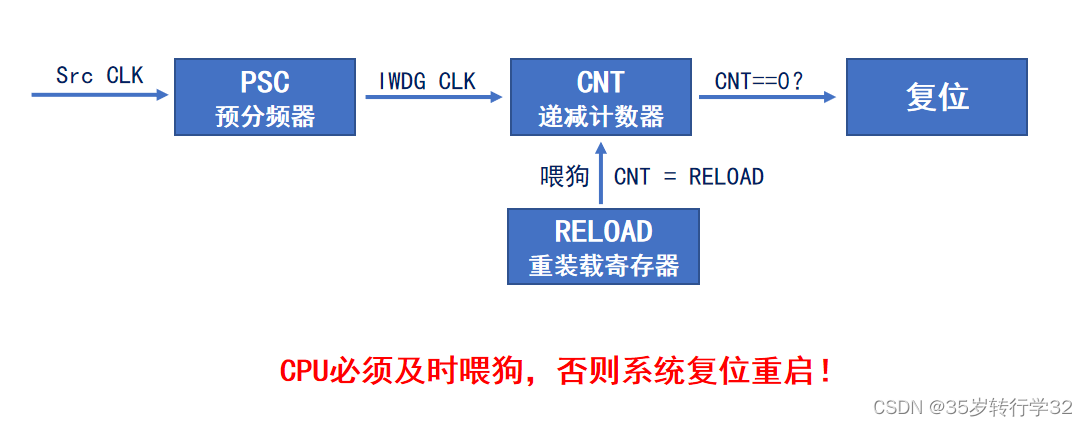
2,IWDG的本质:能产生系统复位信号的计数器
3,IWDG的特性:递减的计数器
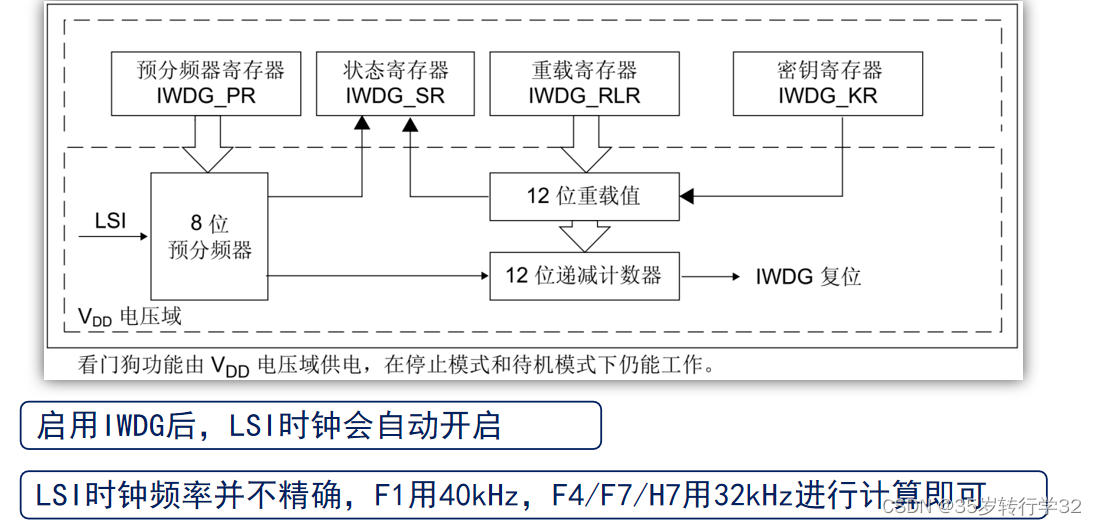
时钟由独立的RC振荡器提供(可在待机和停止模式下运行)
看门狗被激活后,当递减计数器计数到0x000时产生复位
4,喂狗:在计数器计数到0之前,重装载计数器的值,防止复位
IWDG有什么作用
1,异常:外界电磁干扰或者自身系统(硬件或软件)异常,
造成程序跑飞,如:陷入某个不正常的死循环,打断正常的程序运行
2,作用:主要用于检测外界电磁干扰,或硬件异常导致的程序跑飞问题
3,应用:在一些需要高稳定性的产品中,并且对时间精度要求较低的场合
二、IWDG工作原理
三、IWDG框图
四、IWDG寄存器
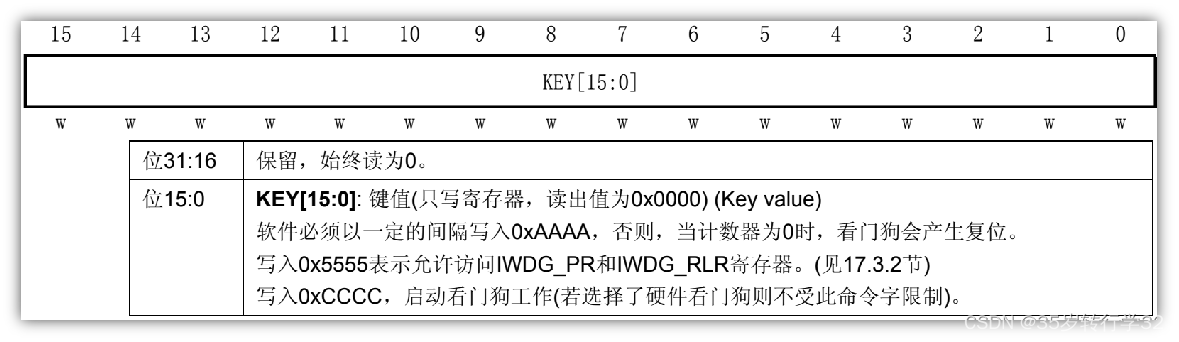
键寄存器(IWDG_KR)
预分频器寄存器 (IWDG_PR)

重装载寄存器(IWDG_RLR)

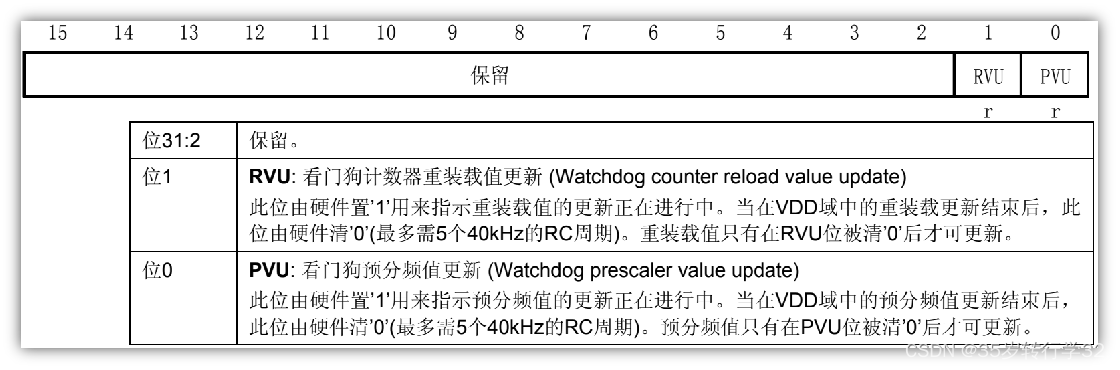
状态寄存器(IWDG_SR)
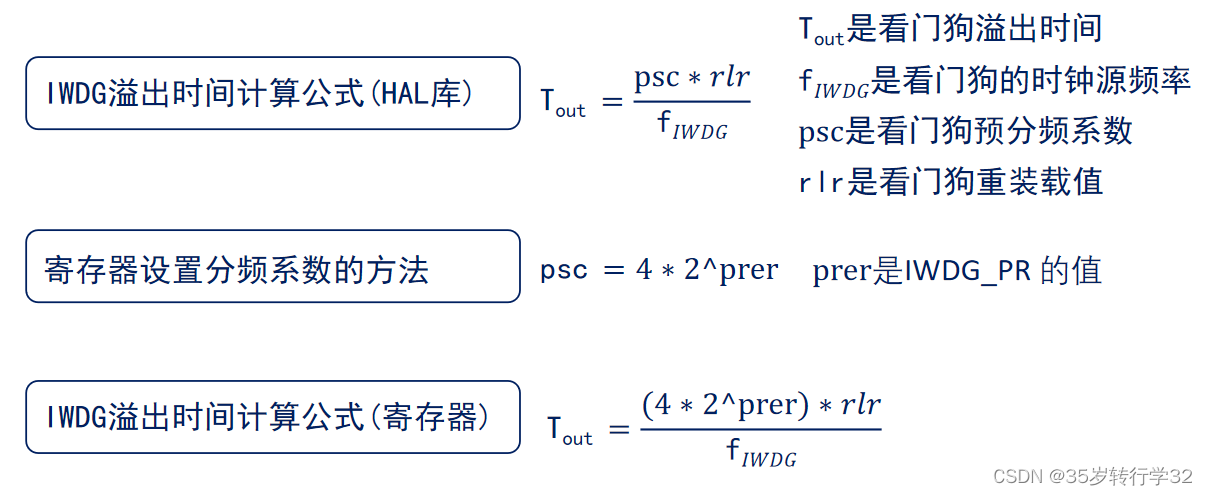
五、IWDG溢出时间计算
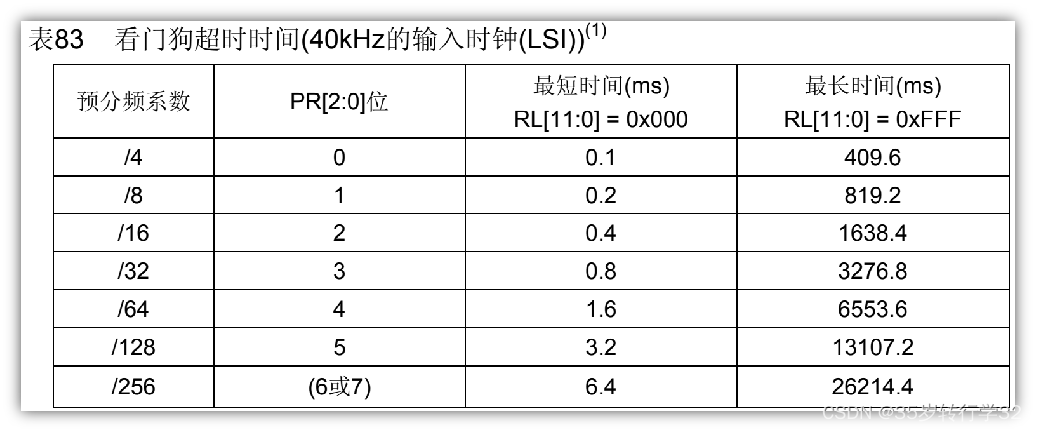
IWDG最短最长超时时间(F1)
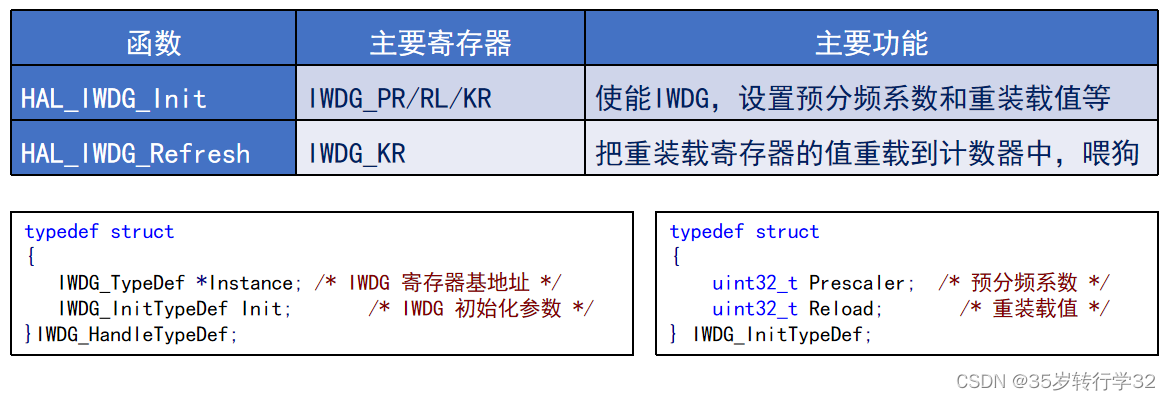
六、IWDG配置步骤

HAL库相关函数介绍
七、示例(验证不及时喂狗系统即将复位)
#include "./BSP/IWDG/iwdg.h"
IWDG_HandleTypeDef g_iwdg_handle;
/* IWDG初始化*/
void iwdg_init(uint8_t prer,uint16_t rlr)
{
g_iwdg_handle.Instance = IWDG;//基地址
g_iwdg_handle.Init.Prescaler = prer;//分频系数
g_iwdg_handle.Init.Reload = rlr;//重装载值
HAL_IWDG_Init(&g_iwdg_handle);
}
/* 喂狗函数 */
void iwdg_feed(void)
{
HAL_IWDG_Refresh(&g_iwdg_handle);
}
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/IWDG/iwdg.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 初始化时钟, 72Mhz */
delay_init(72);
usart_init(115200); /* 波特率115200 */
printf("您还没喂狗请及时喂狗!!!\r\n");
iwdg_init(IWDG_PRESCALER_32, 1250); /* 分频系数32,重装载值1250,约为1S */
while(1)
{
delay_ms(1010);
iwdg_feed();
printf("已经喂狗\r\n");
}
}















 404
404











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









