







前言:
在正文开始之前,首先给大家介绍一个不错的人工智能学习教程:https://www.captainbed.cn/bbs。其中包含了机器学习、深度学习、强化学习等系列教程,感兴趣的读者可以自行查阅。
一、算法介绍
深度确定性策略梯度 (Deep Deterministic Policy Gradient,简称DDPG) 算法是一种基于策略梯度的方法,结合了深度神经网络和确定性策略的优势。它特别适用于具有连续动作空间的控制任务,如机械臂控制、自动驾驶等。DDPG算法通过同时训练一个演员网络(Actor)和一个评论家网络(Critic),实现对策略的优化。
主要特点包括:
- 确定性策略:与随机策略不同,DDPG使用确定性策略,直接输出给定状态下的最优动作。
- 经验回放(Replay Buffer):通过存储经验样本,打破样本间的相关性,提升训练稳定性。
- 目标网络(Target Networks):使用延迟更新的目标网络,减少训练过程中的震荡和不稳定。
二、算法原理
2.1 网络结构
DDPG算法由两个主要网络组成:
-
演员网络(Actor):参数为 θ μ \theta^\mu θμ,用于确定性地选择动作。
a = μ ( s ∣ θ μ ) a = \mu(s|\theta^\mu) a=μ(s∣θμ)
-
评论家网络(Critic):参数为 θ Q \theta^Q θQ,用于估计给定状态-动作对的Q值。
Q ( s , a ∣ θ Q ) Q(s,a|\theta^Q) Q(s,a∣θQ)
此外,还存在两个目标网络,分别对应演员和评论家网络,参数为 θ μ ′ \theta^{\mu'} θμ′和 θ Q ′ \theta^{Q'} θQ′,用于计算目标Q值。
2.2 经验回放
经验回放池 D \mathcal{D} D用于存储经验元组 ( s t , a t , r t , s t + 1 ) (s_t, a_t, r_t, s_{t+1}) (st,at,rt,st+1)。在每次训练迭代中,算法从 D \mathcal{D} D中随机采样一个小批量样本,打破数据间的相关性,提高训练效率和稳定性。
2.3 目标网络的更新
目标网络的参数通过软更新方式更新:
θ μ ′ ← τ θ μ + ( 1 − τ ) θ μ ′ \theta^{\mu'} \leftarrow \tau \theta^\mu + (1 - \tau) \theta^{\mu'} θμ′←τθμ+(1−τ)θμ′
θ Q ′ ← τ θ Q + ( 1 − τ ) θ Q ′ \theta^{Q'} \leftarrow \tau \theta^Q + (1 - \tau) \theta^{Q'} θQ′←τθQ+(1−τ)θQ′
其中, τ \tau τ是软更新的步长,通常取值较小,如 0.001 0.001 0.001。
2.4 损失函数与优化
-
评论家网络的损失函数采用均方误差(MSE):
L = 1 N ∑ i = 1 N ( y i − Q ( s i , a i ∣ θ Q ) ) 2 L = \frac{1}{N} \sum_{i=1}^N \left( y_i - Q(s_i, a_i|\theta^Q) \right)^2 L=N1i=1∑N(yi−Q(si,ai∣θQ))2
其中,
y i = r i + γ Q ′ ( s i + 1 , μ ′ ( s i + 1 ∣ θ μ ′ ) ∣ θ Q ′ ) y_i = r_i + \gamma Q'(s_{i+1}, \mu'(s_{i+1}|\theta^{\mu'})|\theta^{Q'}) yi=ri+γQ′(si+1,μ′(si+1∣θμ′)∣θQ′)
-
演员网络的损失函数通过最大化Q值来优化策略:
J = − 1 N ∑ i = 1 N Q ( s i , μ ( s i ∣ θ μ ) ∣ θ Q ) J = -\frac{1}{N} \sum_{i=1}^N Q(s_i, \mu(s_i|\theta^\mu)|\theta^Q) J=−N1i=1∑NQ(si,μ(si∣θμ)∣θQ)
2.5 算法流程
- 初始化演员网络 μ ( s ∣ θ μ ) \mu(s|\theta^\mu) μ(s∣θμ)和评论家网络 Q ( s , a ∣ θ Q ) Q(s,a|\theta^Q) Q(s,a∣θQ),以及对应的目标网络 μ ′ \mu' μ′和 Q ′ Q' Q′。
- 初始化经验回放池 D \mathcal{D} D。
- 对于每个回合:
- 在环境中选择动作 a t = μ ( s t ∣ θ μ ) + N t a_t = \mu(s_t|\theta^\mu) + \mathcal{N}_t at=μ(st∣θμ)+Nt,其中 N t \mathcal{N}_t Nt为噪声,用于探索。
- 执行动作 a t a_t at,观察奖励 r t r_t rt和下一个状态 s t + 1 s_{t+1} st+1。
- 存储经验 ( s t , a t , r t , s t + 1 ) (s_t, a_t, r_t, s_{t+1}) (st,at,rt,st+1)到 D \mathcal{D} D。
- 从 D \mathcal{D} D中随机采样一个小批量样本。
- 计算目标Q值 y i y_i yi。
- 更新评论家网络参数 θ Q \theta^Q θQ,最小化损失 L L L。
- 更新演员网络参数 θ μ \theta^\mu θμ,最大化 J J J。
- 软更新目标网络参数 θ μ ′ \theta^{\mu'} θμ′和 θ Q ′ \theta^{Q'} θQ′。
- 重复以上步骤,直至收敛。
三、案例分析
在本节中,我们将通过在Pendulum-v0环境中应用DDPG算法,展示其具体实现过程。该环境的目标是让倒立摆尽可能长时间地保持直立状态,涉及连续动作空间。
3.1 环境简介
- 状态空间:摆锤的角度、角速度,共3个维度。
- 动作空间:施加的力矩,范围为
[
−
2
,
2
]
[-2, 2]
[−2,2]。
3.2 实现代码
以下是使用PyTorch实现的DDPG算法在Pendulum-v0环境中的部分代码。
# 经验回放池
class ReplayBuffer:
def __init__(self, buffer_size, batch_size, seed):
self.memory = deque(maxlen=buffer_size)
self.batch_size = batch_size
self.seed = random.seed(seed)
def add(self, state, action, reward, next_state, done):
self.memory.append((state, action, reward, next_state, done))
def sample(self):
experiences = random.sample(self.memory, k=self.batch_size)
states = torch.FloatTensor([e[0] for e in experiences]).to(device)
actions = torch.FloatTensor([e[1] for e in experiences]).to(device)
rewards = torch.FloatTensor([e[2] for e in experiences]).unsqueeze(1).to(device)
next_states = torch.FloatTensor([e[3] for e in experiences]).to(device)
dones = torch.FloatTensor([float(e[4]) for e in experiences]).unsqueeze(1).to(device)
return states, actions, rewards, next_states, dones
def __len__(self):
return len(self.memory)
# 神经网络定义
def hidden_init(layer):
fan_in = layer.weight.data.size()[0]
lim = 1. / np.sqrt(fan_in)
return (-lim, lim)
class PolicyNet(nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim, action_bound):
super(PolicyNet, self).__init__()
self.fc1 = nn.Linear(state_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, action_dim)
self.action_bound = action_bound # 动作最大值
# 初始化权重
self.fc1.weight.data.uniform_(*hidden_init(self.fc1))
self.fc2.weight.data.uniform_(-3e-3, 3e-3)
def forward(self, x):
x = F.relu(self.fc1(x))
return torch.tanh(self.fc2(x)) * self.action_bound
class QValueNet(nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(QValueNet, self).__init__()
self.fc1 = nn.Linear(state_dim + action_dim, hidden_dim)
self.fc2 = nn.Linear(hidden_dim, hidden_dim)
self.fc_out = nn.Linear(hidden_dim, 1)
# 初始化权重
self.fc1.weight.data.uniform_(*hidden_init(self.fc1))
self.fc2.weight.data.uniform_(*hidden_init(self.fc2))
self.fc_out.weight.data.uniform_(-3e-3, 3e-3)
def forward(self, x, a):
cat = torch.cat([x, a], dim=1) # 拼接状态和动作
x = F.relu(self.fc1(cat))
x = F.relu(self.fc2(x))
return self.fc_out(x)
# DDPG智能体
class DDPGAgent:
''' DDPG算法 '''
def __init__(self, state_dim, hidden_dim, action_dim, action_bound, sigma, actor_lr, critic_lr, tau, gamma, device):
self.actor = PolicyNet(state_dim, hidden_dim, action_dim, action_bound).to(device)
self.critic = QValueNet(state_dim, hidden_dim, action_dim).to(device)
self.target_actor = PolicyNet(state_dim, hidden_dim, action_dim, action_bound).to(device)
self.target_critic = QValueNet(state_dim, hidden_dim, action_dim).to(device)
# 初始化目标网络并设置和主网络相同的参数
self.target_critic.load_state_dict(self.critic.state_dict())
self.target_actor.load_state_dict(self.actor.state_dict())
self.actor_optimizer = optim.Adam(self.actor.parameters(), lr=actor_lr)
self.critic_optimizer = optim.Adam(self.critic.parameters(), lr=critic_lr, weight_decay=WEIGHT_DECAY)
self.gamma = gamma
self.sigma = sigma # 高斯噪声的标准差
self.tau = tau # 目标网络软更新参数
self.action_dim = action_dim
self.device = device
def take_action(self, state):
state = torch.tensor([state], dtype=torch.float).to(self.device)
self.actor.eval()
with torch.no_grad():
action = self.actor(state).cpu().data.numpy().flatten()
self.actor.train()
# 给动作添加噪声,增加探索
action += self.sigma * np.random.randn(self.action_dim)
return np.clip(action, -self.actor.action_bound, self.actor.action_bound)
def soft_update(self, net, target_net):
for target_param, param in zip(target_net.parameters(), net.parameters()):
target_param.data.copy_(param.data * self.tau + target_param.data * (1.0 - self.tau))
def update(self, replay_buffer):
if len(replay_buffer) < BATCH_SIZE:
return
states, actions, rewards, next_states, dones = replay_buffer.sample()
# 更新Critic网络
with torch.no_grad():
next_actions = self.target_actor(next_states)
Q_targets_next = self.target_critic(next_states, next_actions)
Q_targets = rewards + (self.gamma * Q_targets_next * (1 - dones))
Q_expected = self.critic(states, actions)
critic_loss = F.mse_loss(Q_expected, Q_targets)
self.critic_optimizer.zero_grad()
critic_loss.backward()
self.critic_optimizer.step()
# 更新Actor网络
actor_loss = -torch.mean(self.critic(states, self.actor(states)))
self.actor_optimizer.zero_grad()
actor_loss.backward()
self.actor_optimizer.step()
# 软更新目标网络
self.soft_update(self.critic, self.target_critic)
self.soft_update(self.actor, self.target_actor)
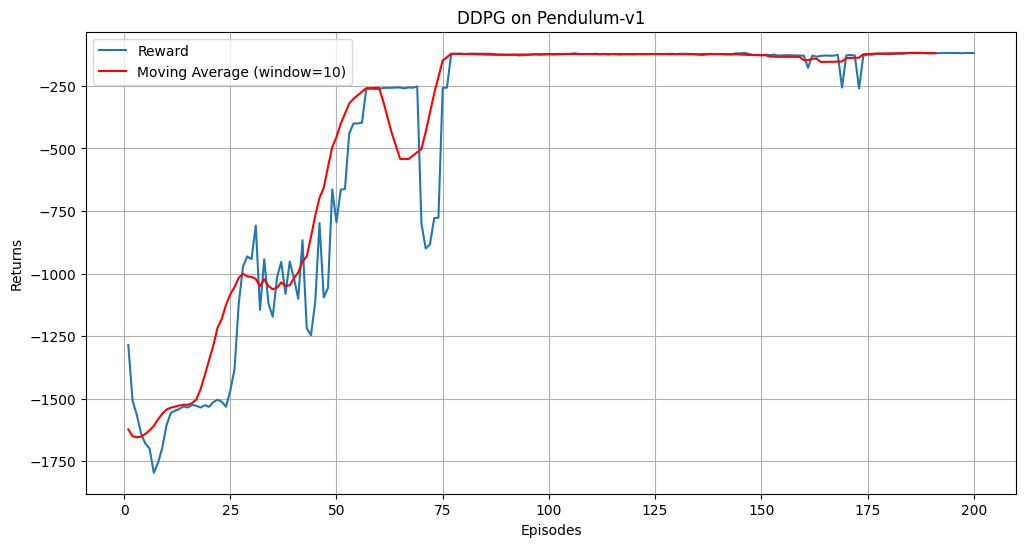
3.3 运行结果
Episode 10 Average Score: -1623.12
Episode 20 Average Score: -1536.40
Episode 30 Average Score: -1287.98
Episode 40 Average Score: -1021.30
Episode 50 Average Score: -995.55
Episode 60 Average Score: -401.11
Episode 70 Average Score: -311.09
Episode 80 Average Score: -433.98
Episode 90 Average Score: -122.43
Episode 100 Average Score: -125.27
Episode 110 Average Score: -122.54
Episode 120 Average Score: -122.86
Episode 130 Average Score: -122.51
Episode 140 Average Score: -123.11
Episode 150 Average Score: -122.93
Episode 160 Average Score: -127.22
Episode 170 Average Score: -146.53
Episode 180 Average Score: -138.31
Episode 190 Average Score: -119.34
Episode 200 Average Score: -118.65
在Pendulum-v0环境中,DDPG智能体经过200个回合的训练后,奖励曲线应逐渐上升,表明智能体的策略在不断优化。滑动平均曲线更平滑,能够更清晰地反映训练趋势。
四、总结
DDPG算法通过结合演员-评论家架构、经验回放和目标网络等技术,有效地解决了连续动作空间中的强化学习问题。在Pendulum-v0环境中的应用展示了其强大的学习能力和策略优化效果。随着研究的深入,DDPG及其衍生算法在更多复杂任务中的应用前景广阔。



















 682
682

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











