






目录
一、测据流程实现
用Trig和Echo引脚实现测距的流程:
1.通过Trig输出一段至少10us的高电平(脉冲),触发一次测距,超声波在传输的过程中Echo一直输出高电平。
2.在Trig脉冲输出后,立即检测Echo引脚的电平,测出Echo高电平持续的时间t,t就是超声波在所测距离一个来回所需时间。
感应角度:不大于15度
探测距离:2cm-450cm
高精度可达0.2cm
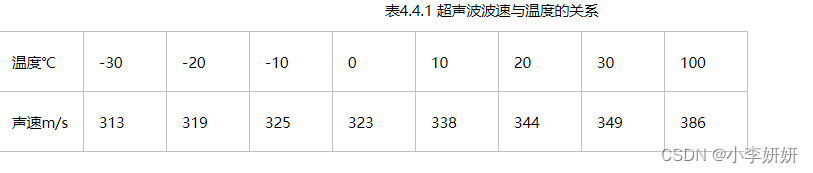
利用定时器3的TIM_IT_Update中断来计数,stm32f103时钟是72M, TIM3_Int_Init(1000-1,72-1);//1Mhz的计数频率,1us计数一次,计数到1000为1ms,产生一次溢出中断 ,超声波的速度取344m/s=344mm/ms,具体可更据温度设置,以毫秒为单位乘以速度,当前counter值补足1ms时,把us换算成ms:如图
计数距离就是用上面的函数得到来回时间(ms为单位),除以2得到单程时间,再乘以速度344mm/ms,得到距离ms为单位)

2种处理数据的方法(前面两个函数实质一样)
GetLength_Hc()
GetLength2_Hc()
GetLength3_Hc()
二、主要代码实现
“timer.h”
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
extern u16 HcCountMs;
void TIM3_Int_Init(u16 arr,u16 psc);
#endif
“timer.c”
#include "timer.h"
u16 HcCountMs=0;
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3, TIM_IT_Update,ENABLE);//使能更新中断,当溢出时产生中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
void TIM3_IRQHandler(void) //TIM3中断,一个节拍1us,共1000个节拍,即1ms中断一次
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:溢出中断(更新中断)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
HcCountMs++;
}
}
“hc_sr04.c”
#include "hc_sr04.h"
#include "timer.h"
#include "delay.h"
#include "usart.h"
//#define HCSR04_PORT GPIOB
//#define HCSR04_CLK RCC_APB2Periph_GPIOB
//#define HCSR04_TRIG GPIO_Pin_5
//#define HCSR04_ECHO GPIO_Pin_6
//#define TRIG_Send PBout(5)
//#define ECHO_Reci PBin(6)
#define N 7
double data[N];
void HC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(HCSR04_CLK, ENABLE); //使能时钟
//触发引脚,推挽输出
GPIO_InitStructure.GPIO_Pin = HCSR04_TRIG; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(HCSR04_PORT, &GPIO_InitStructure); //
GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG); //默认拉低
//回应引脚,浮空输入
GPIO_InitStructure.GPIO_Pin = HCSR04_ECHO; //
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //
GPIO_Init(HCSR04_PORT, &GPIO_InitStructure); //IO口速度为50MHz
GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO); //默认拉低
TIM3_Int_Init(1000-1,72-1);//1Mhz的计数频率,1us计数一次,计数到1000为1ms,产生一次溢出中断
}
void OpenTimer_Hc(void)
{//每次开始的时候清空
TIM_SetCounter(TIM3,0);//Counter值清零
HcCountMs=0;//溢出次数清零
TIM_Cmd(TIM3, ENABLE); //使能TIM3外设
}
void CloseTimer_Hc(void)
{
TIM_Cmd(TIM3, DISABLE); //使能TIM3外设
}
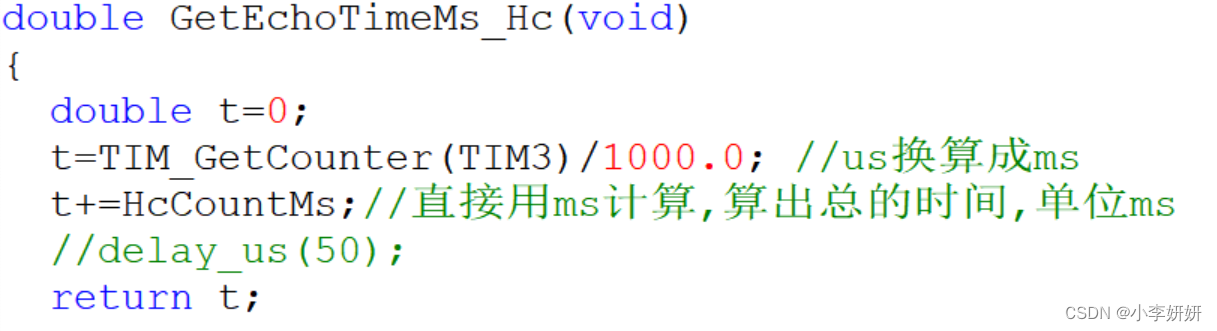
double GetEchoTimeMs_Hc(void)
{
double t=0;
t=TIM_GetCounter(TIM3)/1000.0; //us换算成ms
t+=HcCountMs;//直接用ms计算,算出总的时间,单位ms
//delay_us(50);
return t;
}
//通过Trig输出一段至少10us的高电平(脉冲),触发一次测距
void Trig_Hc(void)
{
TRIG_Send=1;
delay_us(15);//15us
TRIG_Send=0;
}
//采集数据
void adoptData_Hc(void)
{
u8 i;
double t=0;
double lengthTemp=0;
for(i=0;i<N;i++)
{
Trig_Hc();//触发超声波模块测距
while(ECHO_Reci!=1);//等待高电平(低电平就执行,高电平退出)
OpenTimer_Hc();//此时进入高电平,开启定时器计数
while(ECHO_Reci==1);//等待低电平(高电平就执行,低电平退出)
CloseTimer_Hc();//关闭定时器,停止计数
t=GetEchoTimeMs_Hc();//单位ms
lengthTemp=(t/2.0)*334;//单位mm,344m/s=344*1000mm/1000ms=344mm/ms
data[i]=lengthTemp;
}
}
double GetLength2_Hc(void)
{
u8 i;
double sum=0;
double average=0;
adoptData_Hc();//采集数据
for(i=0;i<N;i++)
{
sum+=data[i];
}
average=sum/N;
return average;
}
double GetLength3_Hc(void)
{
u8 i;
double min=4000;//因为是比最小,0比任何正数小,最大测距是4m,所以选用4000mm
double max=0;
double sum=0;
double average=0;
adoptData_Hc();//采集数据
//取出最小
for(i=0;i<N;i++)
{
min=data[i]<min?data[i]:min;
printf("\r\ndata:%.2fmm\t",data[i]);
}
//取出最大
for(i=0;i<N;i++)
{
max=data[i]>max?data[i]:max;
}
printf("\r\nmin:%.2fmm\t",min);
printf("\r\nmax:%.2fmm\t",max);
//去掉最大最小,取平均
for(i=0;i<N;i++)
{
sum+=data[i];
}
sum=sum-min-max;
average=sum/(N-2);
return average;
}
double GetLength_Hc(void)
{
double t=0;
int i=0;
double lengthTemp=0;
double sum=0;
while(i!=N)//循环N次
{
Trig_Hc();//触发超声波模块测距
while(ECHO_Reci!=1);//等待高电平(低电平就执行,高电平退出)
OpenTimer_Hc();//此时进入高电平,开启定时器计数
while(ECHO_Reci==1);//等待低电平(高电平就执行,低电平退出)
CloseTimer_Hc();//关闭定时器,停止计数
t=GetEchoTimeMs_Hc();//单位ms
lengthTemp=(t/2.0)*334;//单位mm,344m/s=344*1000mm/1000ms=344mm/ms
sum+=lengthTemp;
i=i+1;
}
lengthTemp=sum/N;//单位mm
return lengthTemp;
}
“main.c”
#include "led.h"
#include "usart.h"
#include "hc_sr04.h"
#include "delay.h"
#include "sys.h"
#include "timer.h"
int main(void)
{
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组2
uart_init(9600);
LED_Init(); //初始化与LED连接的硬件接口
HC_Init();
printf("超声波初始化成功!\r\n");
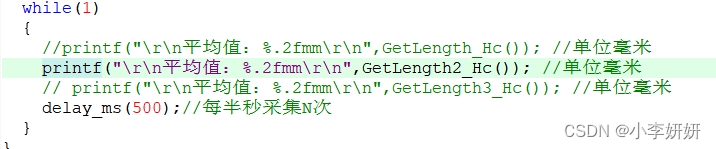
while(1)
{
printf("\r\n平均值:%.2fmm\r\n",GetLength_Hc()); //单位毫米
//printf("\r\n平均值:%.2fmm\r\n",GetLength2_Hc()); //单位毫米
//printf("\r\n平均值:%.2fmm\r\n",GetLength3_Hc()); //单位毫米
delay_ms(500);//每半秒采集N次
}
}
三、实验测试

1,当使用GetLength_Hc()获取长度,求和再取平均

串口现象:第一个值刚开始测距,不准确,理所应当
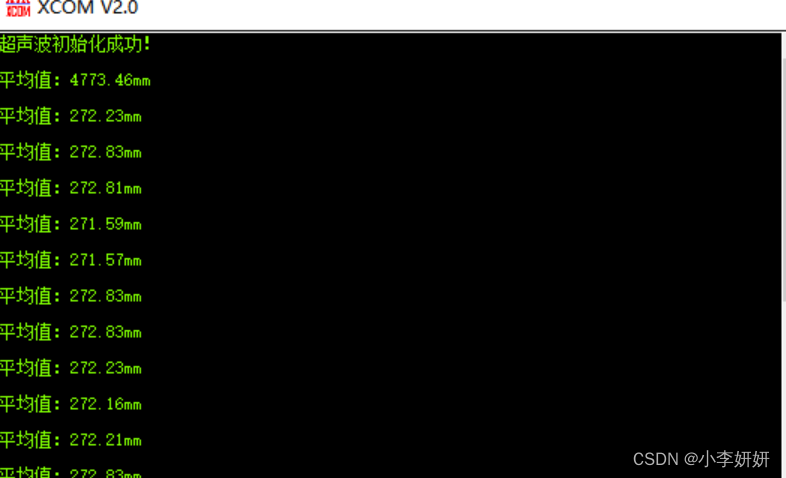
2,当使用GetLength2_Hc()获取长度,实际和1一样,求和再取平均
串口现象

3,当使用GetLength3_Hc()获取长度,去掉最大最小,剩下的取平均

串口现象:
四、结论
文章中使用的显示方式为0.96寸OLED模块显示,驱动MCU使用的为STM32F103C8T6,在使用HCSR04的过程中也可以自己根据HCSR04的驱动代码所得到的距离值去做其他的接口应用















 603
603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









