






模板匹配(基于点)
adjust_mosaic_images.hdev创建混合球形马赛克装饰从辐射调整的装饰
blended_mosaic.hdev创建混合球形和立方体地图马赛克inages
bundle_adjusted_mosaicking. hdev使用束调整马赛克将BGA的部分inages合并成一个大图像
gen_projective_nosaic. hdev将PCB的几个图像组合成一个大的马赛克inage
mosaicking. hdev使用马赛克将BGA的部分inage合并为一个大inage
mosaicking_pyranid. hdev将年数组合成马赛克年数
stationary_camera_self_calibration. hdev对canera进行自我校准
模板匹配(基于相关性)
check_cable_labels检查电缆标签(使用基于相关性的捕获(NCC)检查电缆类型和所需印记的存在)
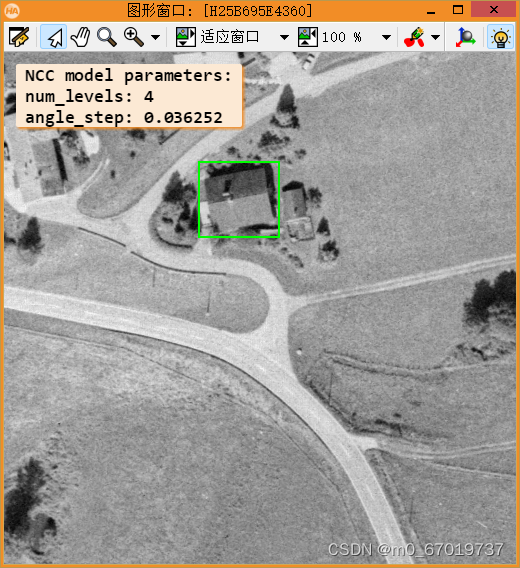
deternine_ncc_model_params(为基于相关性的匹配确定参数)
*基于相关性的模板匹配NCC_盾山狂热粉的博客-CSDN博客
*操作符确定NCC模型参数确定
*基于相关性匹配的参数。
签名
dev_update_off( : : : )
描述
此过程将开发人员更新pc,开发人员更新var和开发人员更新窗口设置为“关闭”
例程
dev_update_off ()
* do something
dev_update_on ()
替代函数
dev_update_pc, dev_update_var, dev_update_window
参考
dev_update_on
dev_update_off ()
dev_close_window ()
dev_open_window (0, 0, 512, 512, 'black', WindowHandle)
* I:=[]
for Index := 1.3 to 1.6 by 0.1
I := [I,Index]
endfor
for Index := 1 to 3 by 1
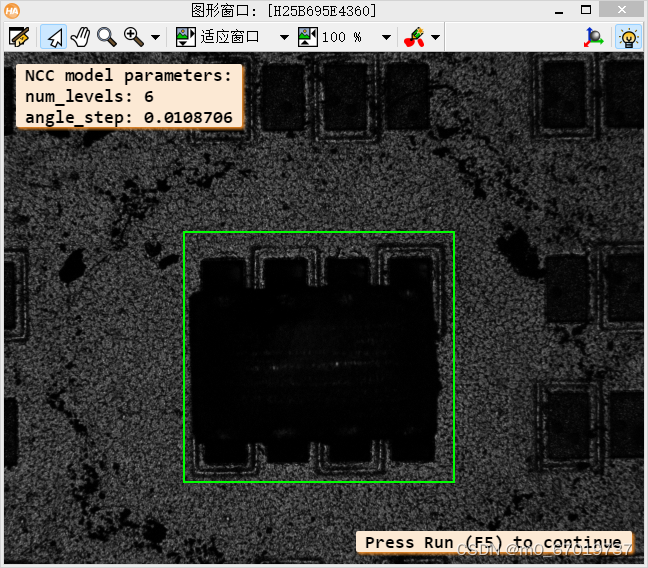
if (Index == 1)
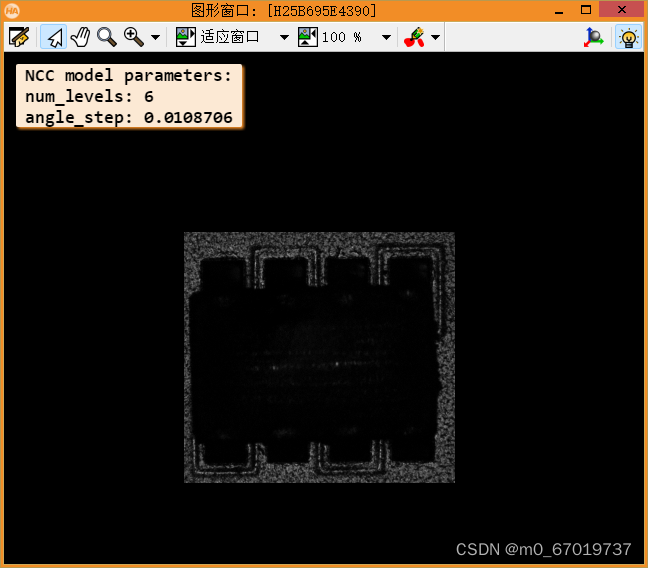
read_image (Image, 'smd/smd_on_chip_05')
gen_rectangle1 (Rectangle, 180, 180, 430, 450)
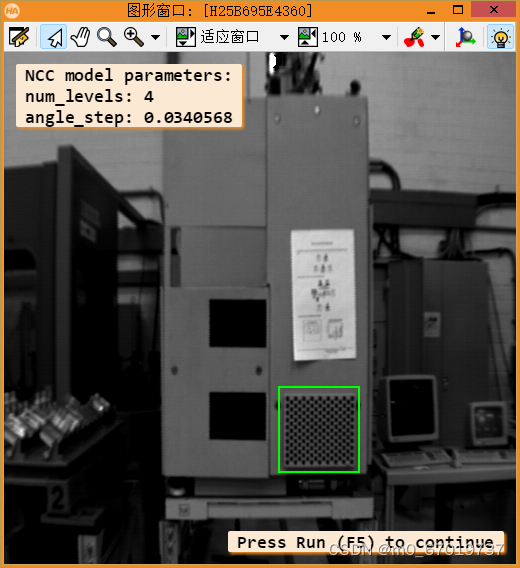
elseif (Index == 2)
read_image (Image, 'fabrik')
gen_rectangle1 (Rectangle, 335, 275, 420, 355)
elseif (Index == 3)
read_image (Image, 'mreut')
gen_rectangle1 (Rectangle, 110, 195, 185, 275)
endif
dev_resize_window_fit_image (Image, 0, 0, -1, -1
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
dev_display (Image)
dev_set_draw ('margin')
dev_set_line_width (2)
dev_set_color ('green')
dev_display (Rectangle)
reduce_domain (Image, Rectangle, ImageReduced)
*第三张
determine_ncc_model_params (ImageReduced, 'auto', -0.39, 0.79, 'use_polarity', 'all', ParameterName, ParameterValue)
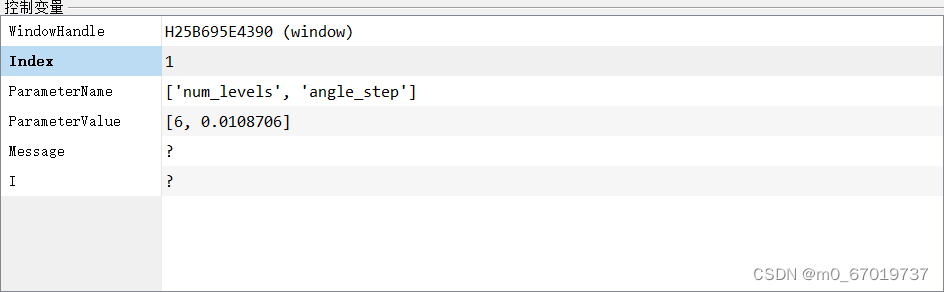
Message := 'NCC model parameters:'
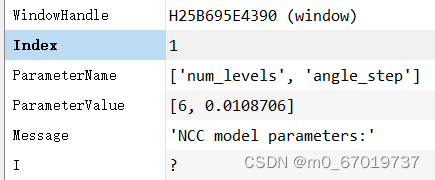
*第二张
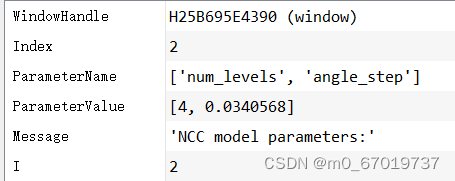
for I := 0 to |ParameterName| - 1 by 1
Message[I + 1] := ParameterName[I] + ': ' + ParameterValue[I]
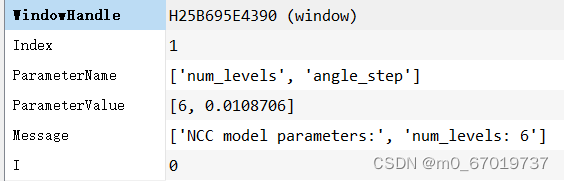
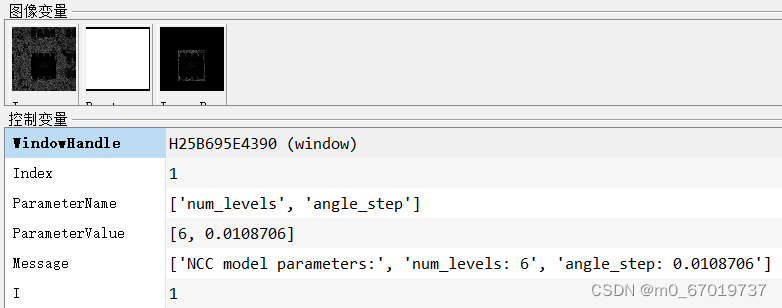
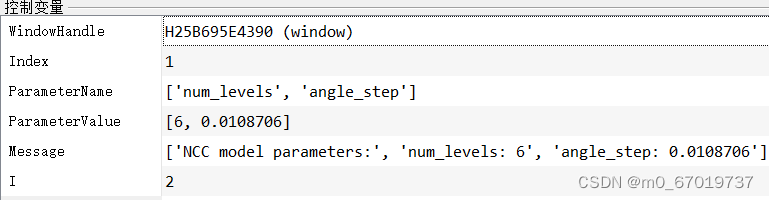
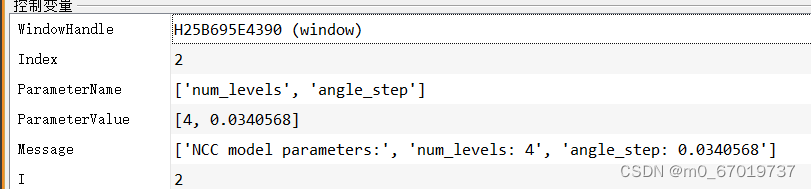
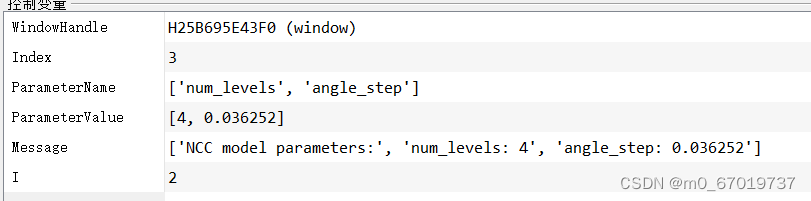
endfor
disp_message (WindowHandle, Message, 'window', 12, 12, 'black', 'true')
if (Index < 3)
disp_continue_message (WindowHandle, 'black', 'true')
endif
stop ()
endfor
dev_update_on ()
find_ncc_model_defocused. hdev(使用基于相关性的匹配在纹理和焦点发生变化的情况下找到一个对象)
find_ncc_nodel_defocused_precision. hdev(检查不同聚焦镜头图像中的ncc匹配)
find_ncc_model_exposure. hdev(使用基于相关性的匹配在线性光照变化的情况下找到一个对象)
inspect_bottle_label_360_degree. hdev360度检查瓶标(将一个瓶子的四个内格组合成一个内格,显示瓶子展开的标签)
模板匹配(基于描述符)
detect_brochure_pages.hdev 在图片数据库中查找文章页面
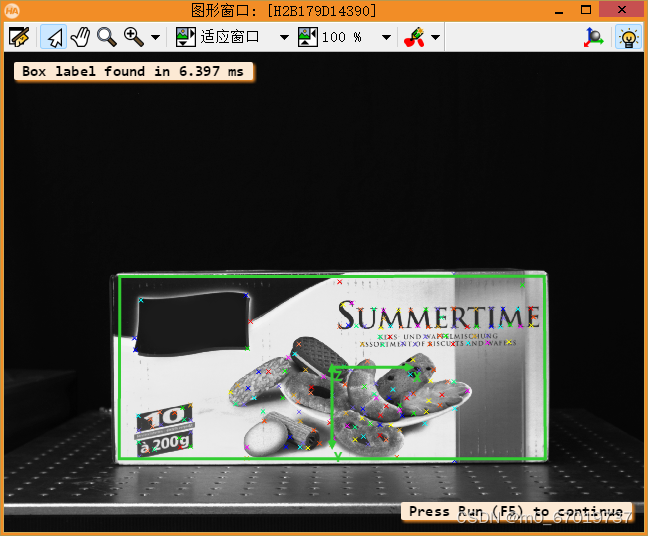
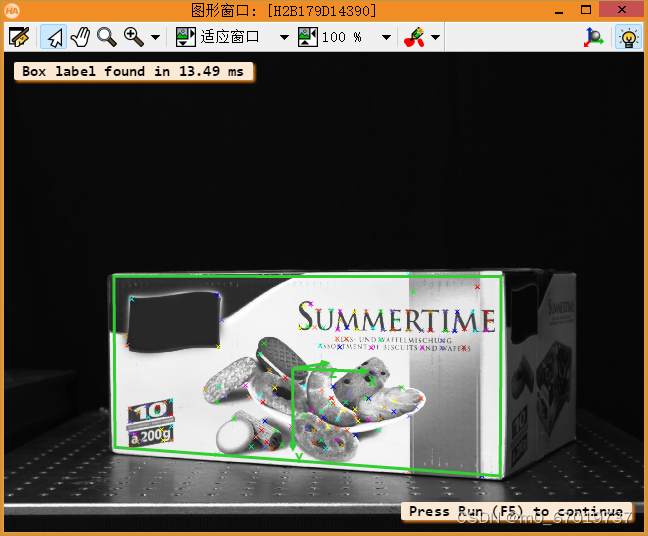
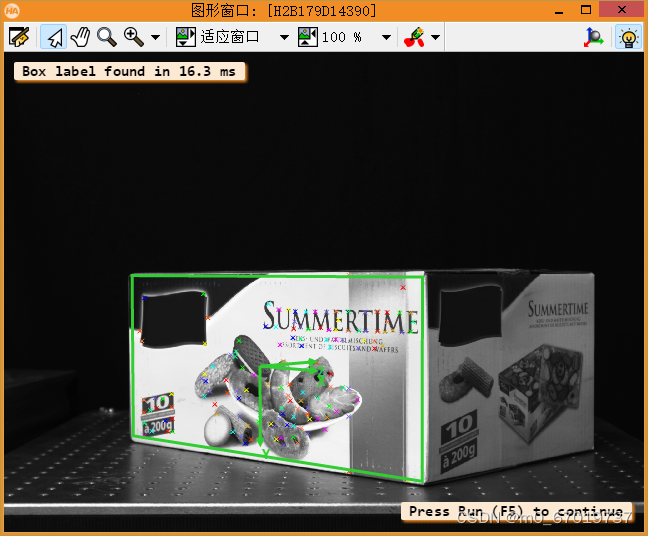
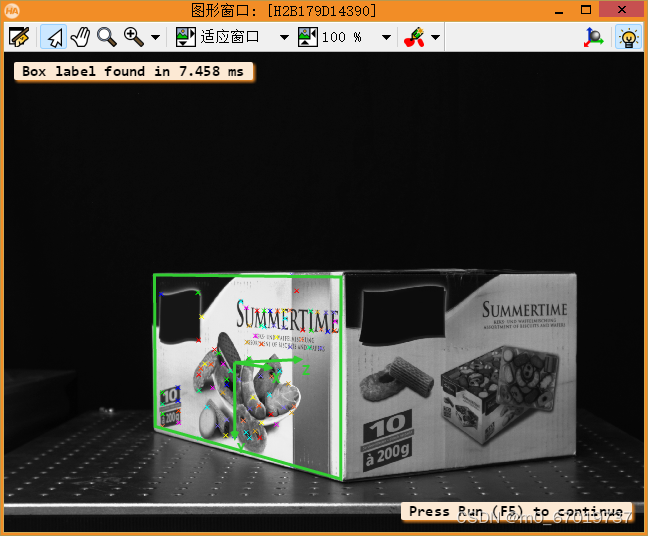
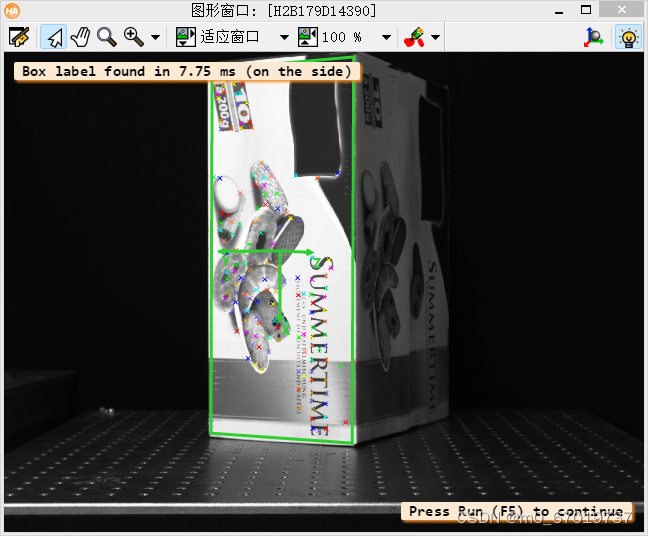
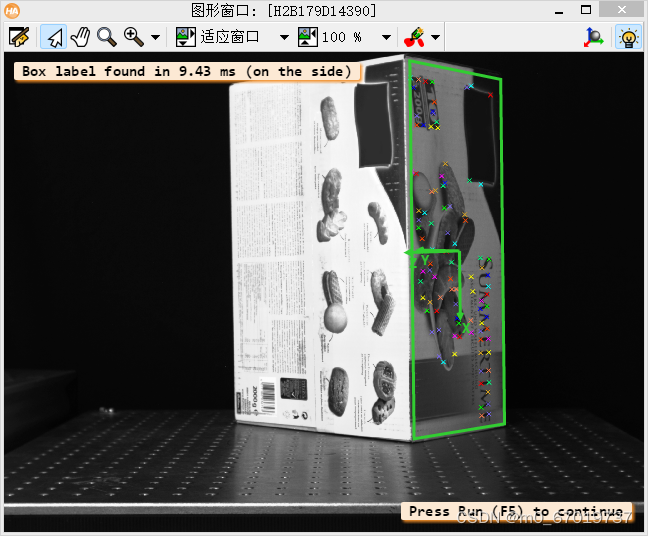
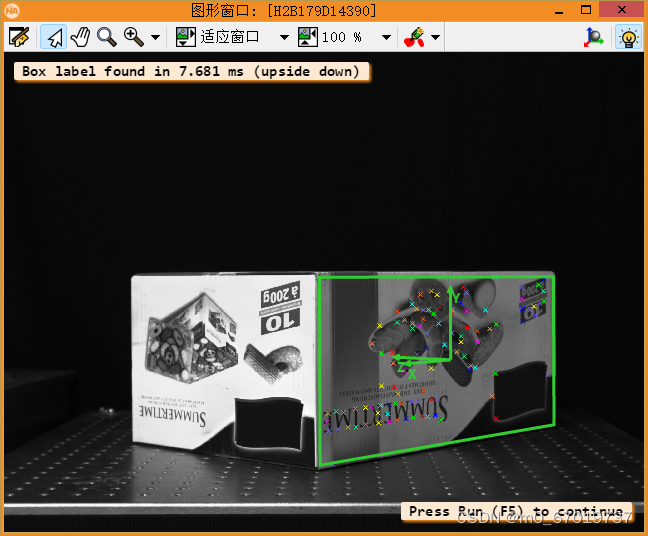

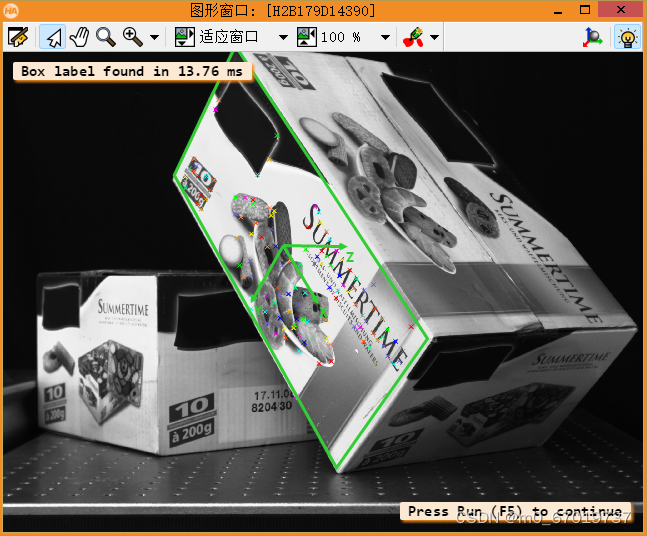
locate_cookie_box. hdev使用基于描述符的匹配定位cookie框

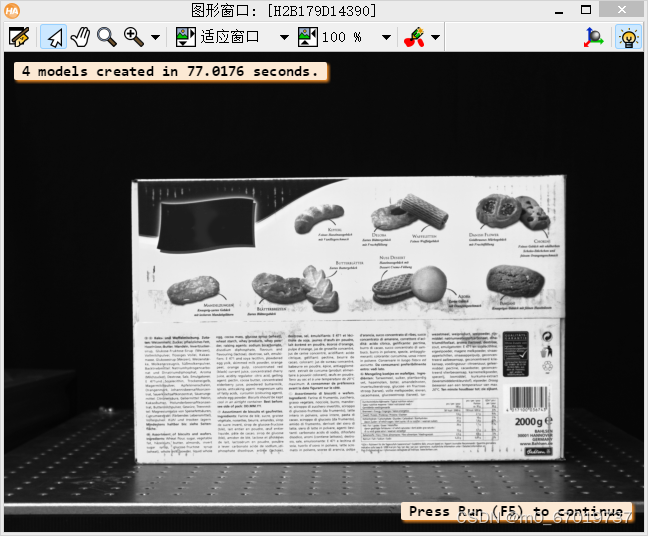
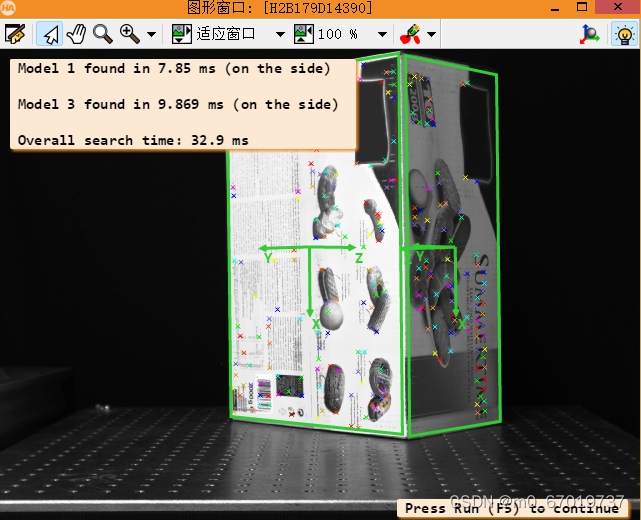
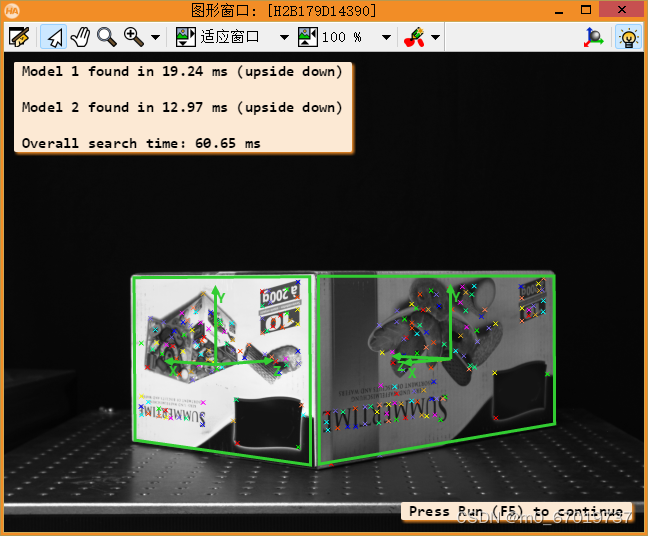
locate_cookie_box_multiple_models.hdev使用基于描述符的匹配定位cookie盒
pose_from_point_correspondences. hdev比较三种从点对应估计姿态的方法















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









