






SPI是一种高速,全双工,同步通信总线,在芯片上管脚仅只有四根线
应用于:EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理
四根线 MISO;主设备数据输入,从设备数据输出;
MOSI;主设备数据输出,从设备数据输入;
SCLK:时钟信号,由主设备产生;
CS:从设备片选信号,由主设备控制
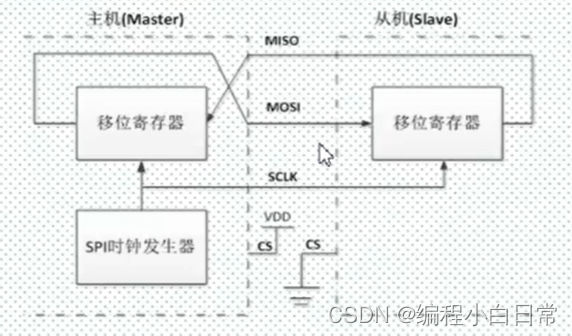
SPI 的工作原理
①:硬件方面为四根线
②:主机和从机都有一个串行移位寄存器,主机通过SPI串行移位寄存器写入一个字节发送一次传输
③:串行移位寄存器通过MOSI信号线将字节发送给从机,从机将自己的串行移位寄存器通过MISO返回给主机,从而两个移位寄存器内容被交换
④:外设的读写操作同步完成,只进行写操作,则会忽略读操作
主机只进行从机的读操作,则主机需要发送一个空字节给从机引发传输
SPI的特征 (图来源于手册23.2.1)
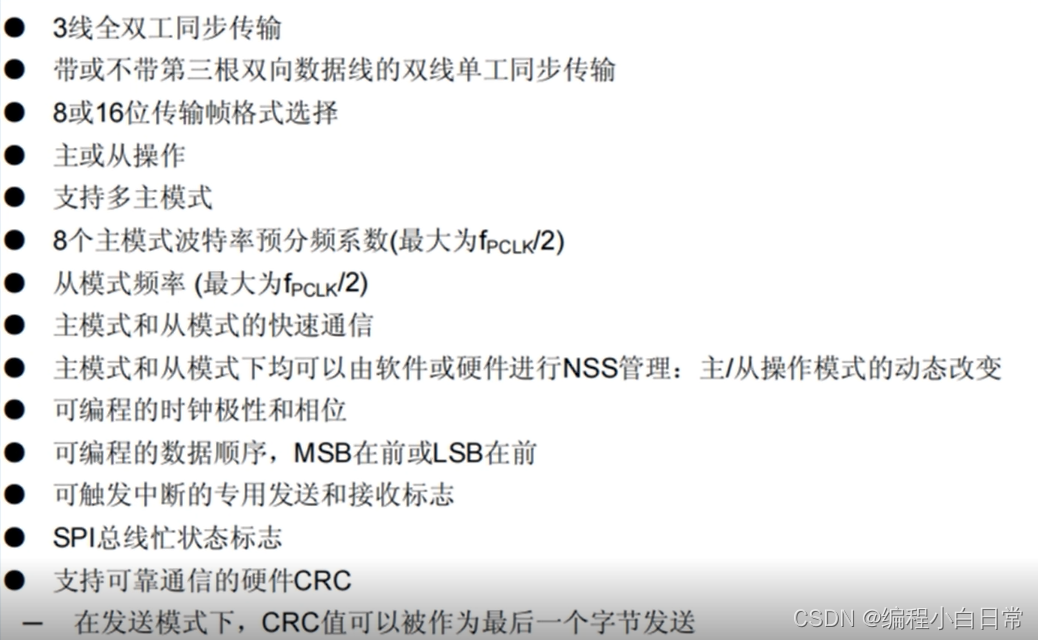

STM32的SPI接口可以配置为支持SPI协议或者支持IIS音频协议,默认为SPI的协议
可以通过软件的方式切换为IIS方式
NSS
软件模式:可以设置SPI_CR1寄存器的SSM位使能
内部NSS信号电平的话可以通过写SPI_CR1的SSI位来驱动
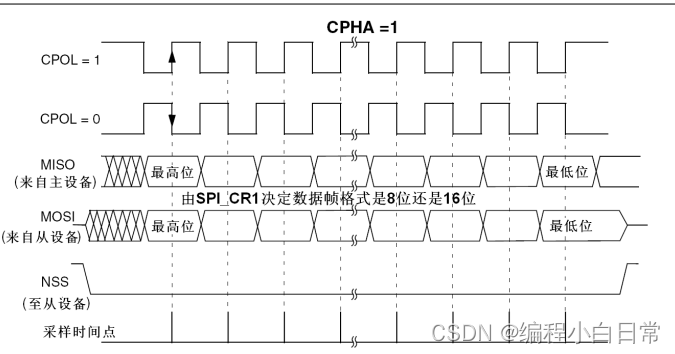
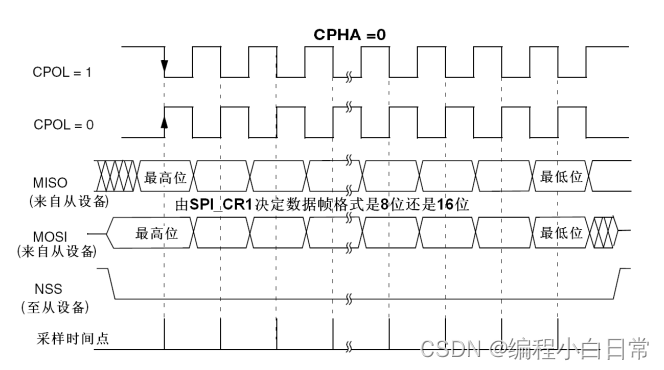
时钟信号的相位和极性
①SPl_CR寄存器的CPOL和CPHA位,能够组合成四种可能的时序关系,CPOL(时钟极性)位控制在没有数据传输时时钟的空闲状态电平,此位对主模式和从模式下的设备都有效。
如果CPOL被清0',SCK引脚在空闲状态下保持低电平。
如果CPOL被置‘1',SCK引脚在空闲状态保持高电平。
如果CPHA(时钟相位)位被置'1',SCK时钟的第二个边沿(0为下降沿,1为上升沿)进行数据位的采样,数据在第二个时钟边沿被锁存。
如果CPHA位被清0,SCK时钟的第一个边沿(0为下降沿,1为上升沿)进行数据位采集,数据在第一个时钟边沿被锁存。
CPOL时钟极性和CPHA时钟相位的组合选择数据捕捉的时钟边沿
SPI引脚配置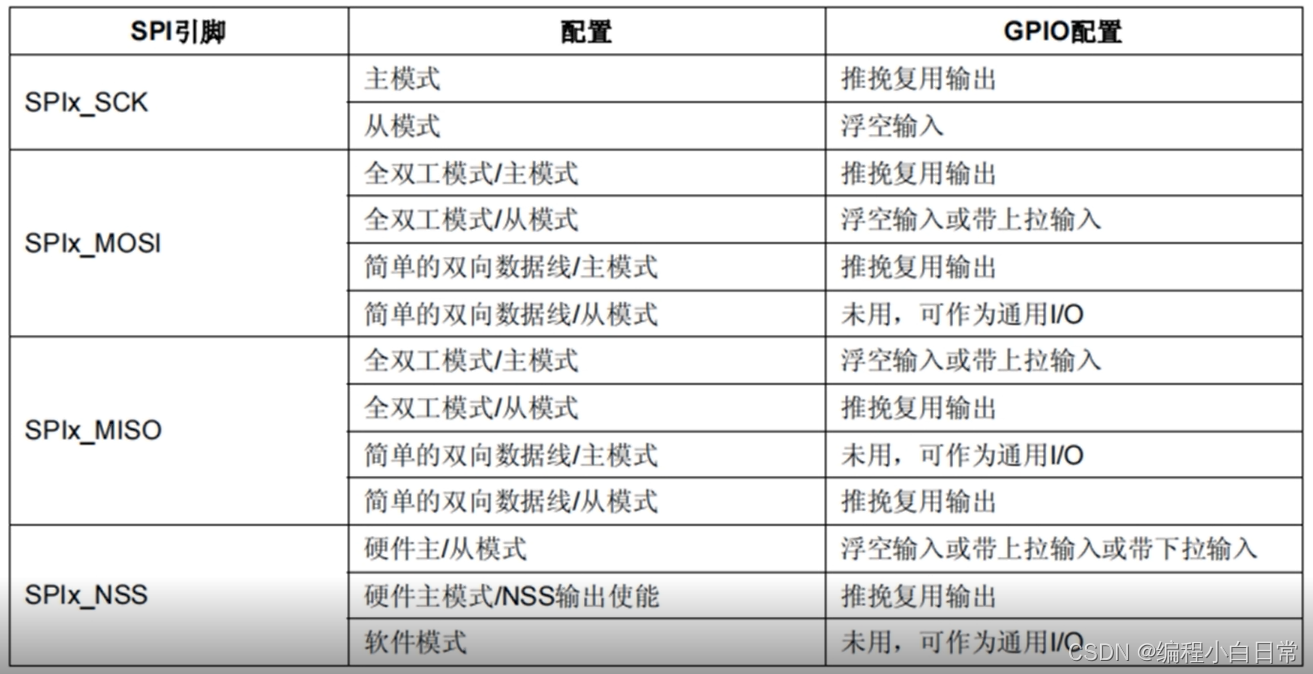
SPI库函数配置
void SPI2_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化GPIO
GPIO_SetBits(GPIOB,GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置双线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI为主模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI数据大小为8位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //设置SPI默认时钟悬空为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //设置SPI数据捕获为第二个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //设置SPINSS为软件管理
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //设置SPI模式从高位传输
SPI_InitStructure.SPI_CRCPolynomial = 7; //设置SPI CRC值计算的多项式
SPI_Init(SPI2,&SPI_InitStructure); //初始化SPI
}

















 12万+
12万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











