






一、引言
abb机器人的编程语言中没有专为Modbustcp写的函数,这一点和博图PLC不同。abb机器人想要进行Modbustcp通信使用的还是Socket通信发送和接收信息的方式,同时需要自己去在示教器或者RobotStudio仿真软件中搭建ModbusTcp程序框架,这和使用VS编写Modbustcp通信程序相似。以下内容主要讲述是abb机器人和上位机视觉平台为客户端,PLC为服务器进行Modbustcp通信的03功能码的通信,其他功能码类似。Modbustcp的功能码介绍可以看一下03功能码
二、Float数据类型传输
首先要知道的是Float数据类型占4个字节,Modbustcp的一个线圈寄存器占2个字节,也就是说一个浮点Float数据要占用2个线圈寄存器。
RobotStudios编写modbustcp框架:
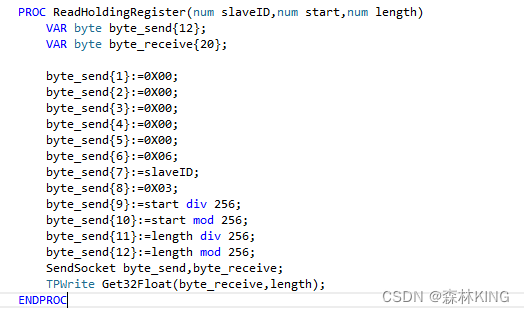
03功能框架:
slaveID为单元识别码 start为起始地址 length为读取寄存器的个数
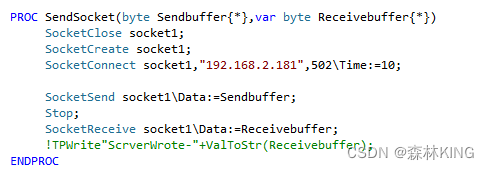
其中SendSocket模块: ip地址为自己电脑ip地址 前三位相同 后一位可以随意我这里填181
端口号:502
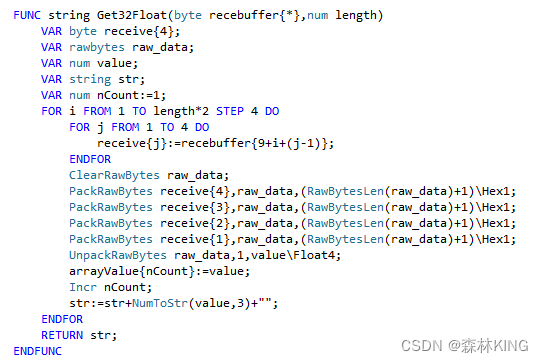
Get32Float模块: 也就是发送之后,服务器返回的数据要进行解析
将字节数组转为浮点类型数据
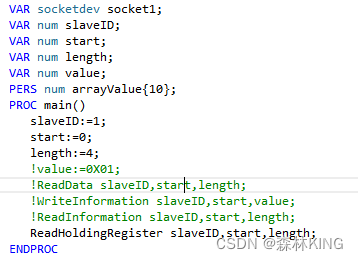
主程序:读取两个浮点数据,需要读取length:4个寄存器,占用8个字节
程序代码如下:
MODULE Module1
VAR socketdev socket1;
VAR num slaveID;
VAR num start;
VAR num length;
VAR num value;
PERS num arrayValue{10};
PROC main()
slaveID:=1;
start:=0;
length:=4;
ReadHoldingRegister slaveID,start,length;
ENDPROC
PROC ReadHoldingRegister(num slaveID,num start,num length)
VAR byte byte_send{12};
VAR byte byte_receive{20};
byte_send{1}:=0X00;
byte_send{2}:=0X00;
byte_send{3}:=0X00;
byte_send{4}:=0X00;
byte_send{5}:=0X00;
byte_send{6}:=0X06;
byte_send{7}:=slaveID;
byte_send{8}:=0X03;
byte_send{9}:=start div 256;
byte_send{10}:=start mod 256;
byte_send{11}:=length div 256;
byte_send{12}:=length mod 256;
SendSocket byte_send,byte_receive;
TPWrite Get32Float(byte_receive,length);
ENDPROC
FUNC string Get32Float(byte recebuffer{*},num length)
VAR byte receive{4};
VAR rawbytes raw_data;
VAR num value;
VAR string str;
VAR num nCount:=1;
FOR i FROM 1 TO length*2 STEP 4 DO
FOR j FROM 1 TO 4 DO
receive{j}:=recebuffer{9+i+(j-1)};
ENDFOR
ClearRawBytes raw_data;
PackRawBytes receive{4},raw_data,(RawBytesLen(raw_data)+1)\Hex1;
PackRawBytes receive{3},raw_data,(RawBytesLen(raw_data)+1)\Hex1;
PackRawBytes receive{2},raw_data,(RawBytesLen(raw_data)+1)\Hex1;
PackRawBytes receive{1},raw_data,(RawBytesLen(raw_data)+1)\Hex1;
UnpackRawBytes raw_data,1,value\Float4;
arrayValue{nCount}:=value;
Incr nCount;
str:=str+NumToStr(value,3)+"";
ENDFOR
RETURN str;
ENDFUNC
ENDMODULE
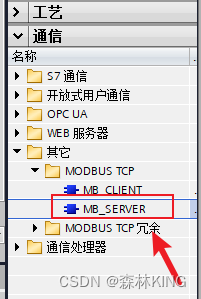
三、PLC建立服务器
需要软件:博图软件
TIA Portal V17
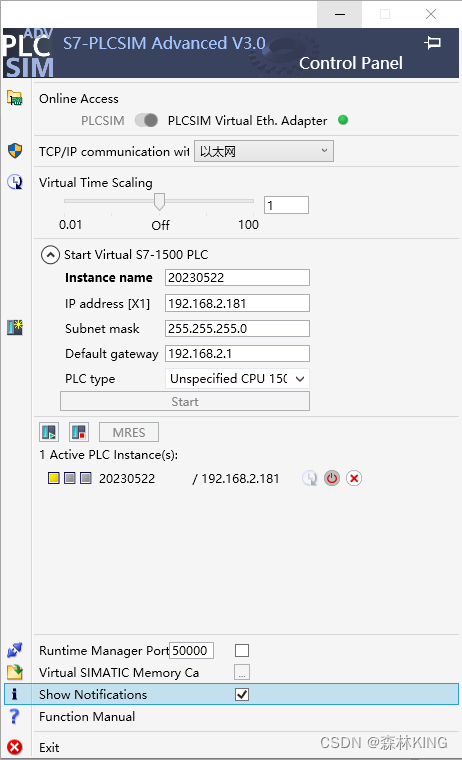
S7-PLCSIM Advanced V3.0

V17使用plc写好的modbustcp函数
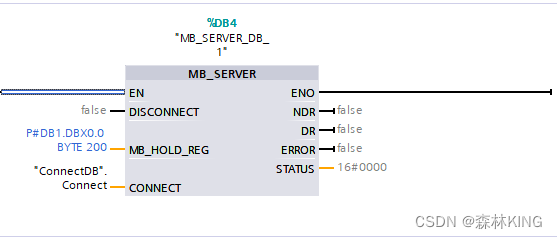
需要两个数据模块:
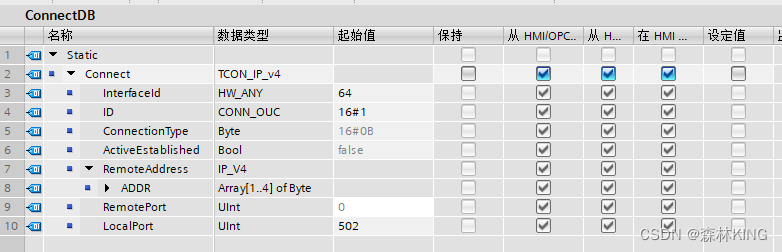
**ConnectDB数据模块:**也就是填写一些ip 端口号等
数据储存数据模块:数据储存的地方
real 类型即为float数据

S7-PLCSIM Advanced V3.0仿真:

















 2591
2591

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









