






初识SPI
高校对学生动手能力高度重视,在课设和毕设中,设计者不免会用到无线通信,本文以STM32ZET6为基础,依托正点原子的例程,实现无线通讯。
首先需要了解spi通讯原理,详见SPI原理超详细讲解---值得一看_Z小旋的博客-CSDN博客
其他介绍SPI的博客内容大都相似,实现无线通讯,了解SPI的通讯规则即可(代码分析部分会详细介绍)。
SPI硬件基础
无线通讯的实现应用的是某宝上购买的NRF24L01,开始时,验证这两个模块能够正常工作,需要使用AT指令用串口配对两个NRF24L01模块(在STM32上实现并不需要此步)。

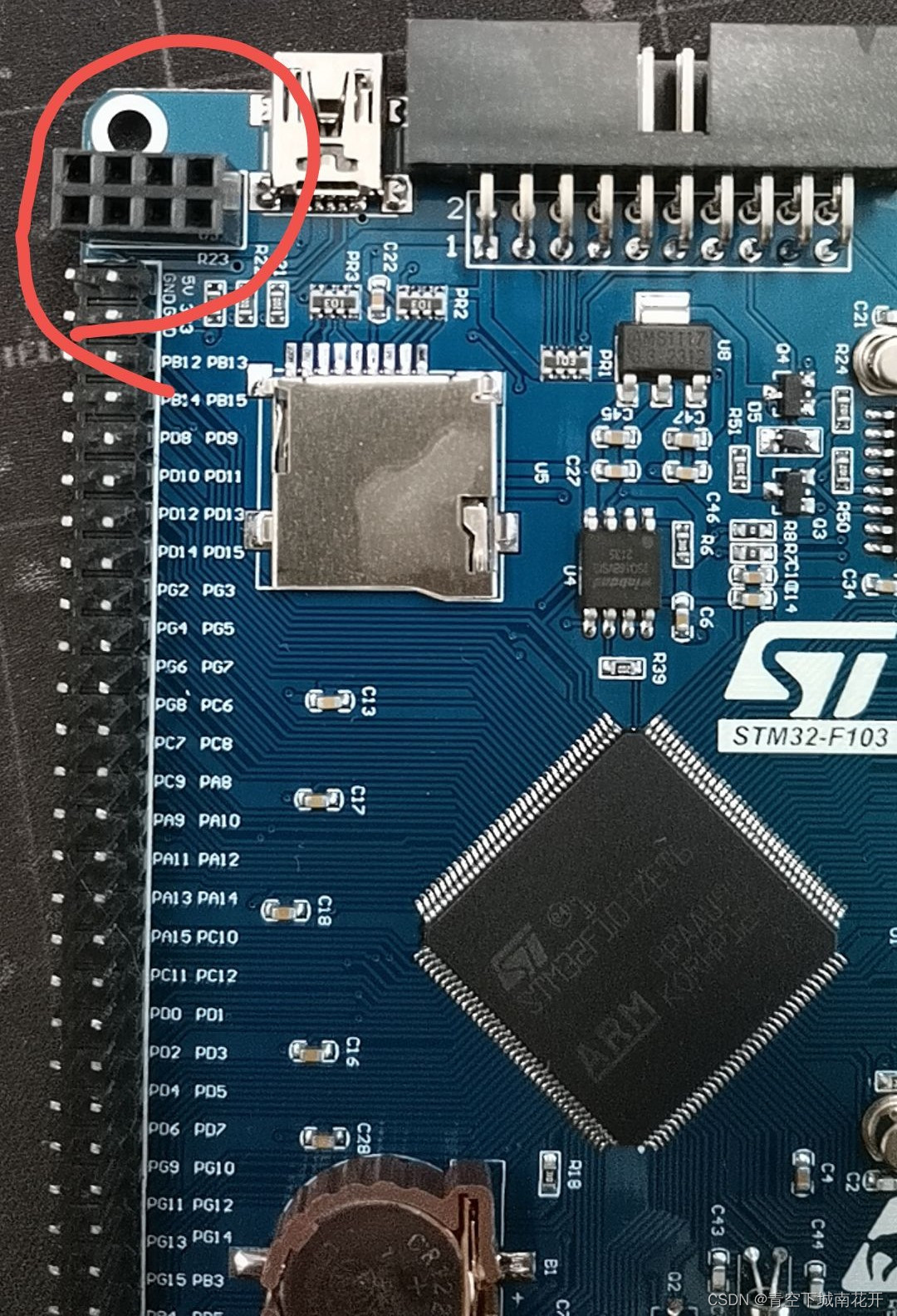
市面上售出的STM32ZET6的开发板均自带NRF24L01的插口。
完成通讯需要两块开发板(这只是一种方案,笔者的同学们有很多不同的方案)。将一块开发板作为发射端,另一块开发板作为接收端。
代码分析
市面上买到的开发板均有配套的的例程。大多数例程是两块开发板,用屏幕显示收到的数据,为实现上下位机的通讯,本文采用的是串口通讯。
SPI配置:
SPI初始化函数
void SPI2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );//PORTB时钟使能
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );//SPI2时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB13/14/15复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); //PB13/14/15上拉
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI2, ENABLE); //使能SPI外设
SPI2_ReadWriteByte(0xff);//启动传输
} SPI速度设置函数
void SPI2_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));
SPI2->CR1&=0XFFC7;
SPI2->CR1|=SPI_BaudRatePrescaler; //设置SPI2速度
SPI_Cmd(SPI2,ENABLE);
} 字节读取函数
//SPIx 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI2_ReadWriteByte(u8 TxData)
{
u8 retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
{
retry++;
if(retry>200)return 0;
}
SPI_I2S_SendData(SPI2, TxData); //通过外设SPIx发送一个数据
retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET)//检查指定的SPI标志位设置与否:接受缓存非空标志位
{
retry++;
if(retry>200)return 0;
}
return SPI_I2S_ReceiveData(SPI2); //返回通过SPIx最近接收的数据
}
24L01配置:
注意:24L01.h头文件中定义的操作线管脚需要对应开发板原理图的各个脚。如果不配置正确,无线通讯无法实现。这是笔者学习无线通讯遇到的第一个问题。


显然,在原始的例程中,引脚与开发板上引脚不匹配,应该为
#define NRF24L01_CE PGout(6) //24L01片选信号
#define NRF24L01_CSN PGout(7) //SPI片选信号
#define NRF24L01_IRQ PGin(8) //IRQ主机数据输入同时, 在24L01模块初始化函数中需要进行相应修改,

NRF24L01读写模式及相应函数:
//检测24L01是否存在
//返回值:0,成功;1,失败
u8 NRF24L01_Check(void)
{
u8 buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5};
u8 i;
SPI2_SetSpeed(SPI_BaudRatePrescaler_4); //spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,buf,5);//写入5个字节的地址.
NRF24L01_Read_Buf(TX_ADDR,buf,5); //读出写入的地址
for(i=0;i<5;i++)if(buf[i]!=0XA5)break;
if(i!=5)return 1;//检测24L01错误
return 0; //检测到24L01
}
//SPI写寄存器
//reg:指定寄存器地址
//value:写入的值
u8 NRF24L01_Write_Reg(u8 reg,u8 value)
{
u8 status;
NRF24L01_CSN=0; //使能SPI传输
status =SPI2_ReadWriteByte(reg);//发送寄存器号
SPI2_ReadWriteByte(value); //写入寄存器的值
NRF24L01_CSN=1; //禁止SPI传输
return(status); //返回状态值
}
//读取SPI寄存器值
//reg:要读的寄存器
u8 NRF24L01_Read_Reg(u8 reg)
{
u8 reg_val;
NRF24L01_CSN = 0; //使能SPI传输
SPI2_ReadWriteByte(reg); //发送寄存器号
reg_val=SPI2_ReadWriteByte(0XFF);//读取寄存器内容
NRF24L01_CSN = 1; //禁止SPI传输
return(reg_val); //返回状态值
}
//在指定位置读出指定长度的数据
//reg:寄存器(位置)
//*pBuf:数据指针
//len:数据长度
//返回值,此次读到的状态寄存器值
u8 NRF24L01_Read_Buf(u8 reg,u8 *pBuf,u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能SPI传输
status=SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
for(u8_ctr=0;u8_ctr<len;u8_ctr++)pBuf[u8_ctr]=SPI2_ReadWriteByte(0XFF);//读出数据
NRF24L01_CSN=1; //关闭SPI传输
return status; //返回读到的状态值
}
//在指定位置写指定长度的数据
//reg:寄存器(位置)
//*pBuf:数据指针
//len:数据长度
//返回值,此次读到的状态寄存器值
u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能SPI传输
status = SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
for(u8_ctr=0; u8_ctr<len; u8_ctr++)SPI2_ReadWriteByte(*pBuf++); //写入数据
NRF24L01_CSN = 1; //关闭SPI传输
return status; //返回读到的状态值
}
//启动NRF24L01发送一次数据
//txbuf:待发送数据首地址
//返回值:发送完成状况
u8 NRF24L01_TxPacket(u8 *txbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8);//spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
NRF24L01_CE=0;
NRF24L01_Write_Buf(WR_TX_PLOAD,txbuf,TX_PLOAD_WIDTH);//写数据到TX BUF 32个字节
NRF24L01_CE=1;//启动发送
while(NRF24L01_IRQ!=0);//等待发送完成
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&MAX_TX)//达到最大重发次数
{
NRF24L01_Write_Reg(FLUSH_TX,0xff);//清除TX FIFO寄存器
return MAX_TX;
}
if(sta&TX_OK)//发送完成
{
return TX_OK;
}
return 0xff;//其他原因发送失败
}
//启动NRF24L01发送一次数据
//txbuf:待发送数据首地址
//返回值:0,接收完成;其他,错误代码
u8 NRF24L01_RxPacket(u8 *rxbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8); //spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&RX_OK)//接收到数据
{
NRF24L01_Read_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);//读取数据
NRF24L01_Write_Reg(FLUSH_RX,0xff);//清除RX FIFO寄存器
return 0;
}
return 1;//没收到任何数据
}
//该函数初始化NRF24L01到RX模式
//设置RX地址,写RX数据宽度,选择RF频道,波特率和LNA HCURR
//当CE变高后,即进入RX模式,并可以接收数据了
void NRF24L01_RX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);//写RX节点地址
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01);//使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通信频率
NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f);//设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG, 0x0f);//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式
NRF24L01_CE = 1; //CE为高,进入接收模式
}
//该函数初始化NRF24L01到TX模式
//设置TX地址,写TX数据宽度,设置RX自动应答的地址,填充TX发送数据,选择RF频道,波特率和LNA HCURR
//PWR_UP,CRC使能
//当CE变高后,即进入RX模式,并可以接收数据了
//CE为高大于10us,则启动发送.
void NRF24L01_TX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_WIDTH);//写TX节点地址
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACK
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x1a);//设置自动重发间隔时间:500us + 86us;最大自动重发次数:10次
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通道为40
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断
NRF24L01_CE=1;//CE为高,10us后启动发送
}注意:只有当发射端和接收端同时工作时,数据线上才有数据,笔者尝试过一个一个地测试,出现的是数据最大溢出标志位。当两个nrf24l01同时工作时,才会进行正常数据传输。
串口与SPI结合使用
通过开头介绍SPI的博客可知,SPI传输的数据储存在有一定长度的数组里,并按顺序实时更新。串口打印函数打印数组中某一个即可显示当前传输的数据。通过串口的服务函数即可进行简单的无线通讯。
串口通信的配置可查阅博客:STM32学习笔记(八)串口通信_小白正在努力的博客-CSDN博客
上位机通过串口把字符发送到无线通讯的发送端开发板,并设置标志位,
void USART1_IRQHandler(void) //串口1中断服务程序
{
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if(Res=='1')
{
state=1;
}
if(Res=='0')
{
state=0;
}
if(Res=='2')
{
state=2;
}
if(Res=='3')
{
state=3;
}
if(Res=='4')
{
state=4;
}
if(Res=='5')
{
state=5;
}
if(Res=='6')
{
state=6;
}
if(Res=='7')
{
state=7;
}
if(Res=='8')
{
state=8;
}
if(Res=='9')
{
state=9;
}
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
} 当标志位发生变化时,用于进行存放数据的数组会发生数据刷新(手动)

if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
if(state==1)
{
for(t=0;t<32;t++)
{
tmp_buf[t]='1';
}
}这样,接收端就会接收到全为某一字符的数组。
总结
本文以串口中断为媒介,进行上位机与下位机的无线通讯。介绍了SPI的详细配置和NRF24L01模块的配置。另外,笔者建议各位读者尝试按键中断等其他中断。笔者能力有限,如有疑问,欢迎各位读者前来讨论。
相关文件:
链接:https://pan.baidu.com/s/11KjytqGbFzOp_nausHNoqg
提取码:hqzj
如有侵权,请联系作者删除。















 1787
1787











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









